关于隐身目标检测与跟踪的几点思考
2014-03-24刘卫华谭顺成
刘卫华,谭顺成
(海军航空工程学院a.科研部;b.信息融合研究所,山东烟台264001)
隐身目标是现代雷达面临的四大威胁之一。雷达目标隐身技术是通过改变武器装备等目标的可探测信息特征,使敌方雷达探测系统不易发现或发现距离缩短的综合性技术,隐身技术改变了空战的方法,特别是隐身飞机与精确制导武器相结合大幅度提高了作战效能,改变了攻防战略平衡。发展反隐身技术和武器系统已成为重要而紧迫的任务。
隐身技术自问世以来,在战斗机、导弹和舰船等主要作战武器系统上的应用得到了较大发展,引起各国高度重视,在现代战争中发挥着重要作用。海湾战争中,F-117A隐身战斗机是唯一能在严密设防的巴格达上空自由活动的飞机,42 架F-117A 战斗轰炸机的飞行架次,仅占美国飞行总架次的2%,却承担了美国战略任务的43%;1999年的科索沃战争中,北约又使用多种隐身兵器对南联盟进行轰炸和导弹攻击,在空袭行动中,除使用了F-117A 隐身战斗机和AGM-129隐身巡航导弹外,还首次使用了B-2隐身轰炸机[1]。
短短几年时间,隐身技术的研究及其应用获得了突破性进展。综析各国经济财力、军事力量和技术发展水平,世界各大军事强国已经拥有不同隐身程度和不同数量的隐身武器。继F-117A和B-2后,美国的洛克希德公司又推出了可以被称为新一代隐身战机的F-22及后续的F-35。其他国家,如俄罗斯、英、法、德、日等国,也在积极发展隐身技术并取得了明显进展。
1 隐身目标检测与跟踪的主要方法
隐身技术发展至今已形成了从远程轰炸机、战斗机到巡航导弹的一系列较为齐全的隐身飞行器。典型隐身飞行器的隐身性能参考值见表1[2]。由表1可见,目标的RCS 大大缩减,而目标RCS的减少又极大地缩短了雷达对这些目标的探测距离,从而大大增强了隐身飞机的空中突防能力。表2给出了雷达探测距离随雷达反射截面积减缩而减小的情况。从表1、2可以看出隐身飞行器的出现和使用,极大地降低微波波段雷达的探测性能,是对传统雷达的严峻挑战,因而尽快研究隐身目标的有效跟踪和检测对于增强雷达的预警探测能力具有重要的现实意义。

表1 典型隐身飞行器RCS减缩水平Tab.1 RCS curtailer level of typical stealth aircraft
目前,探测隐身目标的主要措施有:利用隐身目标的频域窗口,采用米波雷达等低频雷达进行目标探测;利用隐身目标的空域窗口,采用双/多基地雷达或雷达组网技术,由不同频率的雷达从不同方位照射目标,获得隐身目标完整而连续的探测信息;采用新体制雷达,如有源相控阵雷达、天波超视距雷达、地波超视距雷达等;采用先进的信号和数据处理方法,通过在空间和时间上对隐身目标回波的积累处理实现隐身目标的检测和跟踪。

表2 雷达探测距离随RCS缩减而减小的情况Tab.2 Reducing of maximum range of interest as the curtailing of RCS
利用先进的信号和数据处理方法进行隐身目标的探测和跟踪,因其推广性好等优点,受到了人们越来越多的关注,其中,最典型的方法是检测前跟踪方法(TBD)[3-16]。国内已有多家机构和大学对TBD技术进行了研究,取得了许多成果,目前具有代表性的TBD方法主要包括Hough变换[3-4]、极大似然[5]、动态规划[6-9]和粒子滤波(PF)[10-16]等。TBD方法的实质是用时间来换取信噪比,是低信噪比条件下对隐身目标检测与跟踪的有效办法,在现代军事领域获得了广泛的重视和应用,已经成为现今雷达发展的一个重要方向。
2 隐身目标检测与跟踪面临的难点问题
目前,目标检测和跟踪的TBD技术研究大多是在某种特定的假定条件下进行的。然而,实际情况往往具有较大的不确定性:隐身目标信号的强弱随隐身目标所处的杂波背景不同而发生变化;隐身目标运动状态随不同的作战任务机动多变;进入雷达探测范围的隐身目标的数量通常是未知且时变的;机载多普勒(PD)雷达高脉冲重复频率引起的距离模糊[17-20]等。因此,实现对隐身目标的有效探测迫切需要解决这些不确定性带来的问题。具体而言,主要包括以下方面。
2.1 隐身目标模型的不确定性
为了研究和处理的方便,目前的研究大多假定目标为“点目标”模型。但是在实际应用中,随着雷达分辨力、目标大小、目标远近的不同以及目标的高速机动,会出现目标回波占据多个距离分辨单元的情况,即所谓的“距离扩展目标”情况。在此情况下,若将“距离扩展目标”当作“点目标”来处理,会导致目标被杂波和噪声湮没,难以实现对隐身目标的有效检测。
2.2 隐身目标运动模式的不确定性
隐身目标为了提高生存和突防能力,会随时进行一定的机动,同时其运动状态也会因不同的作战任务而改变,对于早期的隐身目标(如F-16S 和F-117A等),其机动性能一般,目标机动对雷达检测跟踪性能的影响并不是很大,但是对于目前比较先进的隐身目标(如F-22 和F-35 等),其机动性能较好,大大增加雷达探测系统检测和跟踪隐身目标的难度。隐身目标的低可观测性使得常规的先检测后跟踪算法中的目标机动检测方法不再适用于隐身目标的机动检测,而已有的隐身目标TBD算法一般假定目标做匀速直线运动,对于高机动隐身目标,如果仍按照匀速运动的假设对目标状态进行建模,将难以实现正确的信号积累,违背了TBD算法通过时间换取信噪比的本质,从而严重影响算法的隐身目标的检测和跟踪性能。
2.3 隐身目标所处环境的不确定性
目前的研究大多是在假定目标幅度为恒定幅值或者某一特定分布的基础上进行的,如采用瑞利分布、Ricean分布、K分布等,但是目标的高速机动,往往同时会造成目标所处环境的发生改变,从而导致目标的幅度分布特性的变化。因此,采用单一的分布假定不能很好地适应不同的目标环境和目标特性。
2.4 多隐身目标的检测与跟踪
在现代战争中,敌机突防密度、批次大大增加,目标也通常采取编队飞行的方式,在这种情况下,对隐身目标进行检测与跟踪,除了目标高机动,还将面临多隐身目标有效检测与跟踪的难点问题。目前,大多数研究往往假设目标个数或者最大目标个数已知,但是在实际中,有无目标以及进入雷达探测范围的目标的数量都是未知,在这种情况下,一般的算法难以实现对邻近目标的有效检测;此外,目标的出现和消失具有随机性,某一时刻监测区域内的目标个数是随时间变化的,若假设最大目标个数已知,当实际目标大于假设最大目标个数时,必然造成漏检,而实际目标个数小于假设最大目标个数时,会造成算法复杂度和计算量的不必要的急剧增长。因此,在目标数先验未知的条件下,准确地确定目标数,并检测出各个目标以及分离出各目标航迹的算法是多隐身目标检测与跟踪需要解决的难点。
2.5 机载高重频雷达的多隐身目标检测与跟踪
目前,PD 体制被广泛用于先进战斗机的雷达,如:美国F-15E“攻击鹰”上的AN/APG-70 雷达、法国幻影2000-5型战斗机上的RDY 雷达、俄罗斯的苏-35上的Zhuk-PH雷达等。机载PD雷达为了无模糊地测量目标速度,通常采用高、中脉冲重复频率,因而测量的目标距离是模糊的,不能反映目标的真实距离情况。为了解距离模糊,机载PD 雷达通常采用多个脉冲重复频率,但这对于隐身目标检测的场合是不适用的,这是因为隐身目标的信噪比很低,需要先通过长时间的信号积累,在达到可靠检测所需的信噪比后,才能再采用多个脉冲重复频率解模糊,但由于目标距离测量是模糊的,采用现有的TBD技术无法对来自同一个目标的信号进行正确的积累。因此,在距离模糊条件下如何进行快速积累,实现对隐身目标的有效检测,是机载PD雷达面临的难点问题。
3 隐身目标检测与跟踪面临难点的探讨
3.1 高机动隐身目标的检测与跟踪方案
针对高机动隐身目标的检测与跟踪问题,在目标状态矢量中增加表示目标存在与否以及目标运动模型2个离散变量,并采用粒子滤波实现包含这2个变量的混合滤波过程,以有效实现机动目标的检测与跟踪。这里,自适应算法表现在2个方面:一方面指在某一次具体的检测跟踪中,可以对具有多种运动形式的目标做自适应检测跟踪;另一方面,这一算法中的运动模式可以根据实际情况增删。
基本思路:首先,对目标不同的运动模式建立多种运动模型;然后,对目标存在状态进行判断,若判断目标存在,再确定其运动模式并得到相应的目标状态转移方程,实现隐身目标运动模式的自适应;最后,通过多帧积累,实现目标的检测与跟踪。针对高机动隐身目标检测与跟踪的解决方案如图1所示。
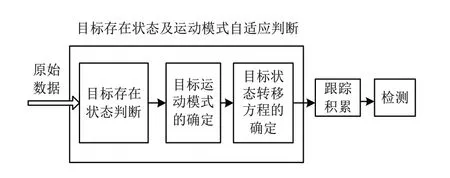
图1 高机动隐身目标检测与跟踪方案Fig.1 Detection and tracking solution for high maneuvering stealth target
3.2 多隐身目标条件下的检测与跟踪方案
引入“目标相继消除”的思想对数目未知的多隐身目标进行检测,将多目标联合跟踪、检测的最优问题,化为单个目标依次跟踪、检测的次优问题,以此解决对邻近目标的检测问题。
基本思路:首先,利用PF-TBD算法对当前量测进行处理,通过计算目标存在概率判断目标是否存在;然后,如果判断不需要继续检测目标,则输出目前已检测到的目标数,否则,需要利用本次已检测到的目标的状态估计值对现有量测集合进行修正,来消除已检测到的目标对检测剩余目标造成的影响;最后,在此基础上,确立一定的检测规则,依次对修正后的量测值进行PF-TBD算法,检测出多个隐身目标,直到门限判决出没有目标存在时转下一时刻的量测数据。针对多隐身目标检测与跟踪的总体方案见图2。
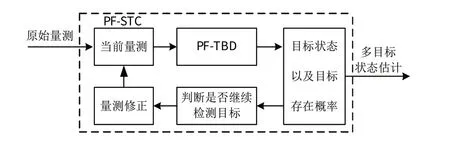
图2 多隐身目标检测与跟踪方案Fig.2 Detection and tracking solution for multiple stealth targets
3.3 机载高重频雷达的多隐身目标检测与跟踪方案
3.3.1 基于Hough变换的技术方案
机载高重频下基于Hough变换的多隐身目标检测技术的核心思想是:尽管对某一脉冲重复频率,其不同时刻各模糊距离测量有基本相似的运动航迹,但不同脉冲重复频率下,对于模糊测量,其运动轨迹不满足一定特性(如不在一条直线上),而对于不模糊测量,其运动轨迹则满足一定特性。
基本思路:首先,利用得到的模糊距离测量,通过一对多映射得到所有可能的距离测量;然后,经过Hough变换将所有可能测量映射到同一个参数空间;最后,在参数空间中对不同时刻的映射进行积累,并通过门限判断,获得目标真实航迹。这里门限选取和参数空间的划分问题是准确检测出目标的关键。根据以上思路,机载高重频下基于Hough变换的多隐身目标检测与跟踪方案如图3所示。

图3 机载高重频下基于Hough变换的多隐身目标检测与跟踪方案Fig.3 Hough transform based solution for multiple stealth targets detection and tracking with airborne high pulse repetition frequency radar
3.3.2 基于动态规划的技术方案
机载高重频下,针对目标密集导致无法利用动态规划对多个隐身目标信号进行有效检测的问题,拟通过正确选择搜索区域和航迹选取规则减少虚假航迹,在此基础上再利用动态规划进行隐身目标检测,并结合中国余数定理,解决各PRF对应距离单元数不互质情况下的解模糊,从而实现多隐身目标检测与跟踪。
基本思路:首先,在正确选择可行的搜索区域和制定合适的航迹平滑规则的基础上,利用动态规划在各重频下进行目标航迹提取,并对提取得到的每条航迹分析,获得各条航迹的特征,如波束位置,航迹头以及径向速度等;然后,进一步利用这些特征,从每个PRF的所有可能航迹中分别得到一条可行航迹构成若干匹配航迹组;最后,利用中国余数定理方法对每个航迹组解模糊。根据以上思路,机载高重频下基于动态规划的多隐身目标检测与跟踪方案如图4所示。
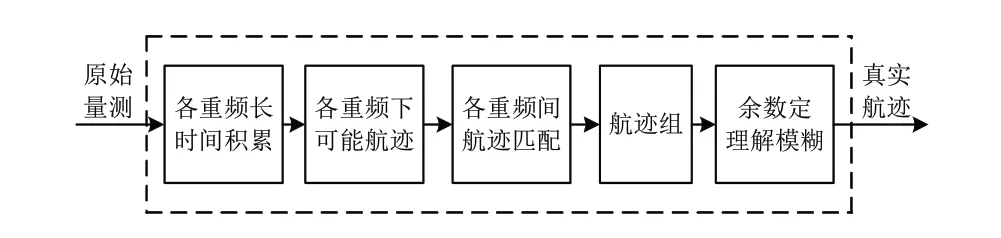
图4 机载高重频下基于动态规划的多隐身目标检测与跟踪方案Fig.4 Dynamic programming based solution for multiple stealth targets detection and tracking with airborne high pulse repetition frequency radar
4 结束语
隐身目标的出现使得现代战争的概念发生了深刻的变化,隐身飞机在多次局部战争中的成功使用使得反隐身技术成为当前的热门研究课题。目标隐身技术的发展,必将进一步降低现有雷达系统对隐身目标的检测与跟踪的能力,严重制约着雷达信息的获取,因而实现对隐身目标的有效探测是亟需解决的现实问题。先进的信号和数据处理方法是低信噪比条件下对隐身目标检测与跟踪的有效办法,在现代军事领域获得了广泛的重视和应用。针对现有算法存在的不足,对目标反隐身技术进行研究,对增强雷达的预警探测能力具有重要的军事意义。
[1]王狂飙.隐身飞机的战斗技术特点分析与防御对策[J].火力与指挥控制,2003,28(6):1-4,9.
WANG KUANGBIAO.The technical and tactical analysis of stealth aircraft and the countermeasure of its defense[J].Fire Control&Command Control,2003,28(6):1-4,9.(in Chinese)
[2]陈永光,李修和,沈阳.组网雷达作战能力分析与评估[M].北京:国防工业出版社,2006:63-68.
CHEN YONGGUANG,LI XIUHE,SHEN YANG.Combat capability analysis and evaluation of radar network[M].Beijing:National Defense Industry Press,2006:63-68.(in Chinese)
[3]FAN L,ZHANG X,WEI L.TBD algorithm based on improved randomized Hough transform for dim target detection[J].Progress in Electromagnetics Research C,2012,31:271-285.
[4]关键,黄勇.MIMO雷达多目标检测前跟踪算法研究[J].电子学报,2010,38(6):1449-1453.
GUAN JIAN,HUANG YONG.Track-before-detect algorithm in a MIMO radar multi-target environment[J].Acta Electronica Sinica,2010,38(6):1449-1453.(in Chinese)
[5]TONISSEN S M,BAR-SHALOM Y.Maximum likelihood track-before-detect with fluctuating target amplitude[J].IEEE Transactions on Aerospace and Electronic Systems,1998,34(3):796-808.
[6]DENG X,PI Y,MORELANDE M,et al.Track-before-detect procedures for low pulse repetition frequency surveillance radars[J].IET Radar,Sonar &Navigation,2011,5(1):65-73.
[7]YI W,KONG L J,YANG J Y,et al.Student highlight:Dynamic programming- based track- before- detect approach to multitarget tracking[J].IEEE Aerospace and Electronic Systems Magazine,2012,27(12):31-33.
[8]吴卫华,王首勇,杜鹏飞.一种基于目标状态关联的动态规划TBD算法[J].空军雷达学院学报,2011,25(6):415-418,422.
WU WEIHUA,WANG SHOUYONG,DU PENGFEI.Dynamic programming track-before-detect algorithm based on target state correlation[J].Journal of Air Force Radar Academy,2011,25(6):415-418,422.(in Chinese)
[9]李涛,吴嗣亮,曾海彬,等.基于动态规划的雷达检测前跟踪新算法[J].电子学报,2008,36(9):1824-1828.
LI TAO,WU SILIANG,ZENG HAIBIN,et al.A new radar track-before-detect algorithm based on dynamic programming[J].Acta Electronica Sinica,2008,36(9):1824-1828.
[10]RISTIC B,ARULAMPALAM S,GORDON NJ.Beyond the Kalman filter-Particle filters for tracking applications[M].Boston:Artech House,2004:239-258.
[11]龚亚信,杨宏文,胡卫东,等.基于多模粒子滤波的机动弱目标检测前跟踪[J].电子与信息学报,2008,30(4):941-944.
GONG YAXIN,YANG HONGWEN,HU WEIDONG,et al.Multiple model particle filter based track-before-detect for maneuvering weak target[J].Journal of Electronics&Information Technology,2008,30(4):941-944.
[12]RUTTEN M G,GORDON N J,MASKELL S.Recursive track-before-detect with target amplitude fluctuations[J].IEE Proceeding-Radar Sonar Navigation,2005,152(5):345-352.
[13]BOERS Y,DRIESSEN J N.Multitarget particle filter track before detect application[J].IEE Proceedings-Radar,Sonar and Navigation,2004,151(6):351-357.
[14]HLINOMAZ P,HONG L.A multi-rate multiple model track-before-detect particle filter[J].Mathematical and Computer Modelling,2009,49(1):146-162.
[15]SU H T,WU T P,LIU H W,et al.Rao-blackwellised particle filter based track-before-detect algorithm[J].IET Signal Processing,2008,2(2):169-176.
[16]龚亚信,杨宏文,胡卫东,等.基于粒子滤波的弱目标检测前跟踪算法[J].系统工程与电子技术,2007,29(12):2144-2148.
GONG YAXIN,YANG HONGWEN,HU WEIDONG,et al.Particle filter based track-before-detect algorithm for weak targets[J].Systems Engineering and Electronics,2007,29(12):2144-2148.(in Chinese)
[17]张明友,汪学刚.雷达系统[M].2 版,北京:电子工业出版社,2006:92-134.
ZHANG MINGYOU,WANG XUEGANG.Radar Systems[M].2nd ed.Beijing:Publishing House of Electronics Industry,2006:92-134.(in Chinese)
[18]WANG N,WANG G H,ZENG J Y,et al.Range ambiguity resolving of HPRF radar based on hybrid filter[J].Science China Information Sciences,2011,54(7):1534-1546.
[19]WANG N,WANG G H,GUAN C B,et al.A Bayesian Approach to simultaneous range ambiguity resolving and tracking for high pulse-repetition frequency radar[J].Journal of Astronautics,2011,32(9):2015-2022.
[20]WANG G H,TAN S C,GUAN C B.Multiple model particle filter track-before-detect for range ambiguous radar[J].Chinese Journal of Aeronautics,2013,26(6):1477-1487.