GPS地表监测数据去噪技术
2014-03-23李卫东
李卫东
(河北金山矿业有限公司总经理, 河北 邢台市 054100)
0 引 言
西郝庄矿矿区进行了多年开采,目前地表存有以前露天开采遗留的露天坑及堆存岩土,地面已出现多处塌陷及较大范围的裂缝。为此,设立西郝庄铁矿采空区GPS地表沉降监测系统,应用现代化的传感和网络通讯技术对地表沉降进行实时监测,及时掌握地表沉降信息,为地压灾害预测提供依据。
由于各种干扰因素的作用,GPS监测数据中的有用信号和噪声的时域和频域特性通常是不一样的,有用信号在时域和频域上具有局部化特征,表现为低频特性或是一些比较平稳的信号;而噪声在时域与频域空间中的分布具有全局性特征,它在整个数据监测与数据采集的时域内处处存在,在频域上表现为高频特性。根据此特性,对其可以通过限定阀值形式对小波系数进行处理,从而降低噪声部分值,再通过信号重构恢复信号,实现有用信号和噪声的分离,实现降噪的目标。
由于Daubechies小波具有很好的正交性、紧支性(紧支撑长度为2N-1)、正则性、近似对称性和适用Mallat快速算法等特点,其时域分析优良,在监测信号的奇异性中具有很大优势,适用于地表监测数据的处理,且在许多工程领域中应用比较成熟。dbN中N越大,其滤波的长度越长,其中db4具有最短的时窗和最高的时间分辨率,去噪效果良好。下面着重介绍Daubechies去噪小波的基本原理。
1 去噪小波的构 造方法
1.1 基本原理
构造去噪小波的充要条件是:对于离散滤波器h={h1,h2,…,hN},两尺度方程

其中,当ω=π,F0(eiω)≠0,且|F0(eiω)|在ω=0~2π范围内的上界≤2p-1。
若{h1,h2,…,hN}满足上述条件(1)~(3),则φ(t)只存在一个解,并且φ(t)是紧支撑正交尺度函数,其支撑区间[0,N]。若令gn=(-1)nh1-n,则
1.2 Daubechies紧支撑正交小波的构造方法

若ψ(t)有p阶消失矩,则对于任何p-1次多项式x(t)=a0+a1t+…+ap-1tp-1,都有〈ψ(t),x(t)〉=0,即ψ(t)与任何p-1次多项式都是正交的。由于
将f(t+2-jk)在2-jk处展开,得
由于ψ(t)有p阶消失矩,则


(1) 小波函数ψ(t)具有p阶消失矩;



其中,当ω=π,F0(eiω)≠0。
取上式的z变换,z=eiω,即
当ω=π,z=-1,F0(-1)≠0。
构造Daobechies紧支撑正交小波滤波器的关键是:合理选择F0(eiω)或F0(z),可选方案为:
Daobechies小波的支撑[-p+1,p+1],尺度函数的支撑[0,2p-1]。
1.3 紧支撑正交小波的构造方法的实现形式
h0+(-1)h1e-iω+(-1)2h2+…+(-1)NhN=0

(-1)(-i)kh1+(-1)2(-2i)kh2+…+(-1)N(-Ni)khN=0
h1-2kh2+…+(-1)N-1NkhN=0,k=1,2,…,p-1
总结起来,可得
2 监测数据去噪实现技术
2.1 去噪实现过程
(1) 选择小波函数和小波分解层数,计算监测数据到第N层的小波分解。小波分解层数的选择也同样影响着数据去噪的效果,若分解层次较少,则可能去噪不彻底,若分解层数太多,则影响计算速度,同时使得部分有用信号消除,且当分解到一定程度后,滤波后的信号几乎保持不变。
(2) 高频系数的阀值选择。阀值选取分为以下6种形式。
第1种是硬阀值形式,即把含噪的小波系数的绝对值与所选定的阀值λ进行比较,将小于等于阀值λ的点变为0,大于阀值λ的点保持不变。
硬阀值法具有彻底去噪的特点,同时也使得信号失去了有用成分。
第2种是软阀值形式,即把含噪的小波系数与所选定的阀值λ进行比较,将大于阀值的点收缩为该点值与阀值的差;将小于阀值相反数的点扩展为该点值与阀值的和;将绝对值小于等于阀值的点变为0。
在处理GPS监测数据时,从第一层到第J层,每一层选择一个软阀值。阀值λ的计算公式为:
这样具有更好的去噪效果。λ对于不同的信号具有自适应性,去噪彻底,同时也不会去除有用信号,N是数据个数;J是分解层数;σ为监测数据的标准方差,计算方法如下:
式中,median为去中值函数,{wJ-1,k,k=1,2,…,2J-1}为小波细节系数。
第3种是强制去噪法,即强制所有分解层下的细节系数置全为0。
{wj-1,k,j=1,2,…,J;k=1,2,…,2j-1}
第4种是Garrote去噪法,即把含噪的小波系数的绝对值与所选定的阀值λ进行比较,将小于等于阀值λ的点变为0,而对大于阀值λ的点按如下公式计算:
第5种是Birge-Massart阈值去噪法,给定一个指定的分解层数j,对j+1以及更高层所有系数保留;对i层(1≤i≤j),保留绝对值最大的ni个系数并确定:
式中,α为经验系数,在信号降噪情况下取α=3;缺省情况下取S=L(1),即第1层分解后系数的长度,一般情况下,S满足L(1)≤S≤2L(1)。设对信号进行i层分解,每层保留的小波系数个数最多为n,由于每层保留的小波系数个数不同,系数较少的层数采取补零的方法使每层系数个数相同,从而形成小波变换值矩阵。
第6种是Semisoft阐值函数,即把含噪的小波系数的绝对值与所选定的阀值λ1和λ2进行比较,按如下公式计算小波系数:
2.2 去噪效果分析
假设所收集到的GPS监测数据为序列为:
s1,s2,…,sN
该序列含有噪声。通过采用小波方法进行去噪,得到去噪后的GPS监测数据序列为
v1,v2,…,vN
则残差为
ri=si-vii=1,2,…,N
2.2.1 残差统计指标
(1) 最大值:max=max{r1,r2,…,rN}。
(2) 最小值:min=min{r1,r2,…,rN}。
(3) 极差:range=max-min。
(6) 频度:mf={r1,r2,…,rN}中出现次数最多的那个值。
(11) 偏态系数:
(12)峰态系数:
(13) 变异系数:
(14)自相关系数:
有偏自相关系数:
无偏自相关系数:
计算上述自相关系数的函数是autocorr(r),若用xcov(r)计算,则所得结果是对称的,即ACF-j=ACFjACF-N+1,ACF-N+2,…,ACF-1,ACF0,ACF1,…,ACFN-1
2.2.2 残差直方图。
将残差序列{r1,r2,…,rN}分成若干个长度相等的区间,统计每个区间内残差值出现的次数,生成残差直方图。从残差直方图能看出残差的分布。
2.2.3 残差FFT分析
对残差序列r={r1,r2,…,rN}进行FFT分析的方法是:
F=fft(r,N)
当k=0,1,…,N-1时,
频率:f=k/(NΔt),Δt为取样时间间隔;
幅值:A=2|F|/N=2abs(F)/N;
相位:α=angle(F)。
3 各监测点监测数据净变化量去噪
GPS01监测数据去噪过程如图1~3所示。
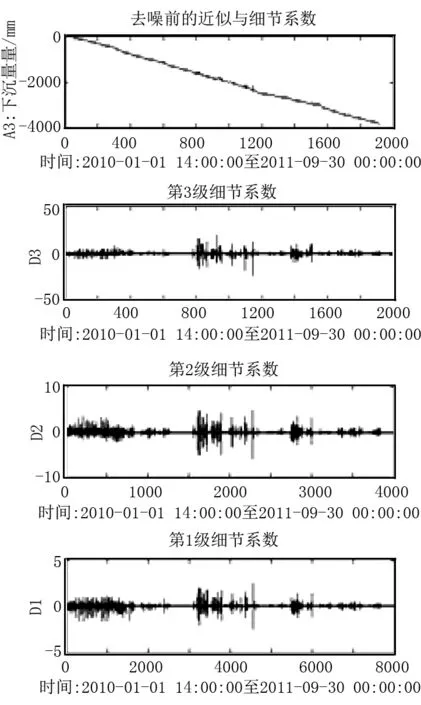
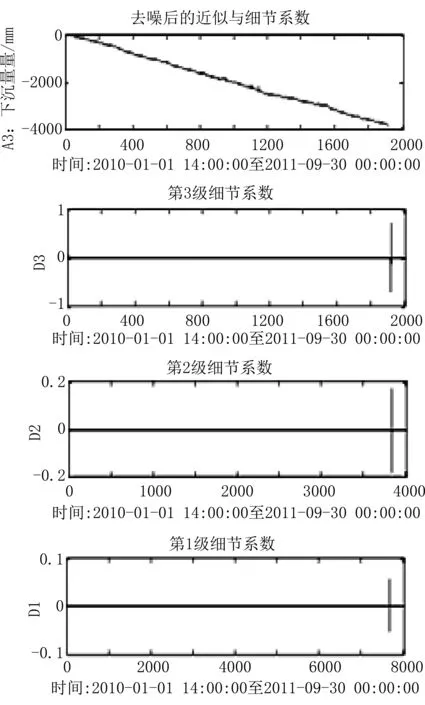
图1 GPS01点z方向监测数据的分解
其他方向的去噪方法一样,在此不再赘述。

图2 GP01点z方向监测数据的去噪
4 结 论
本文介绍了GPS监测数据去噪几种常用技术的原理及其实现过程。欲达到良好的去噪效果,选择合适的技术参数是关键。

图3 GP01点z方向监测数据的残值分析