基于300 kHz超声波换能器的高精度测距装置
2014-03-23王英健
王英健,张 柳
(长沙理工大学电气与信息工程学院,湖南长沙 410076)
0 引言
超声波作为一种高效、准确、非接触式检测手段,被广泛应用于测距、测速、清洗、焊接、碎石、杀菌消毒等领域。在化工、石油、冶金、电力、水处理等行业中,对存储在容器、储罐、仓库内的物料物位检测的准确性、适时性对于实现安全、高效的工业生产具有十分重要的意义。计量的准确与否将对企业的成本核算、能源消耗等指标的正确计算及可信程度产生影响。
常用的40 kHz超声波测距装置由于存在测量精度不高等问题,已难以满足生产中高精度测量的需要。近年来,超声波测距原理虽然变化不大,但由于新材料、新技术的应用,不仅使测量精度有了大幅的提高,而且应用范围也大为扩展,被认为是目前最有前途的测量方法之一[1]。
超声波的频率在很大程度上影响着超声波的传播,其频率越高,声束扩散角越小,能量越集中,方向性和分辨力也越好,但是对于同一材料来说,频率越高,声波衰减也越大[2]。此外,影响超声测距精度的因素除了传感器本身的制作工艺差别外,还与发射和接收电路的性能以及环境的温度等误差的修正方法有关,而关键是准确测量超声波传播时间和环境温度[3]。要实现超声波测量的较高精度,需要仔细分析误差成因,并有针对性地设计相关硬件电路和测量软件,以有效排除超声波受到的各种干扰,提高测量精度。
文中仔细分析了超声波测距的误差主要成因,通过合理选择微处理器型号和超声波换能器、合理调整接收电路放大倍数和门限电压、对回波的脉宽进行测量,以降低回波滞后产生的时间测量误差,设计了一种超声波测距装置,该装置在0~600 mm的测量范围内,误差可控制在±1 mm以内。
2 误差成因与对策及系统方案
2.1误差成因与对策
2.1.1单片机计时量化对距离测量误差的影响
超声波依据S=Ct/2来测量距离,其误差主要由声速C和时间t的测量误差构成。而t的测量误差取决于单片机系统计时量化带来的误差。
ΔS=CΔt
(1)
要求误差小于1 mm,假设C=344 m/s(20 ℃),这时对应的时间为:
(2)
即Δt<2.907 μs
系统采用MP430F235单片机,主频为16 MHz,其计时量化单位为0.062 5 μs,远小于2.907 μs,故其产生的计时误差可忽略。
2.1.2超声波频率对距离测量误差的影响
目前超声波换能器的超声波频率一般有40 kHz、100 kHz、200 kHz和300 kHz等几种规格。超声波测距采用组波发送形式,即一次发送10个周期左右的完整波形,然后进入接受回波状态。接收通道一般都有放大器和比较器。超声波回声会随距离增大而衰减。其波形如图1所示。
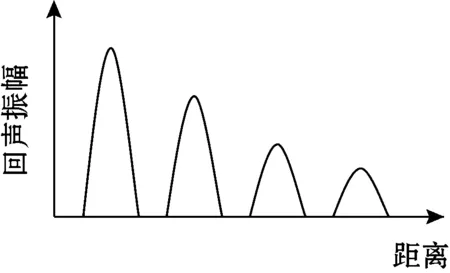
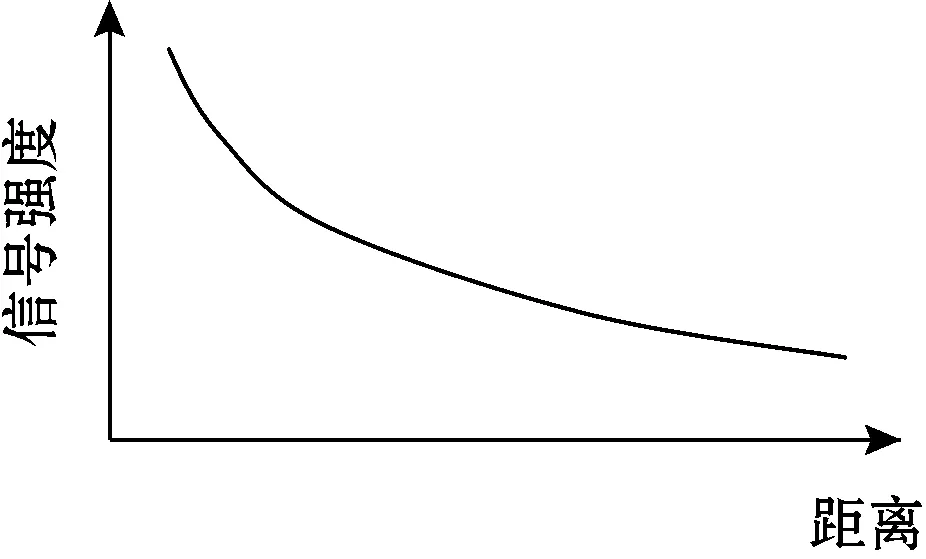
图1 超声波回波波幅衰减图
经设有门限的比较器处理后的波形图如图2所示。

图2 经比较器整形后波形
从图2可以看出随着距离的增加,接收脉冲的宽度变窄,前沿后移,造成时间测量误差。整形后的波形由若干个超声波周期构成,前沿后移意味着超声波回波测量时间延后。如果采用40 kHz超声波,丢失一个超声波周期最大可能滞后25 μs,这将造成最大8.6 mm的误差;如果采用300 kHz的超声波,丢失一个超声波周期最大可能滞后3.3 μs,将造成最大1.1 mm的误差,要比40 kHz超声波小很多,但如若不采取适当措施,误差仍不满足要求,因此,即使采用300 MHz,仍要采取措施来降低时间测量的误差。为减少波形前沿延后产生的误差,有人采用自动增益的方式,将整形后的脉冲调成等宽度,但电路较复杂,增益控制难以准确,误差不能彻底消除。还有多种滞后时间估算方法,但要检测的参数多,增加电路复杂性,多种参数测量还会带来新的误差。故设计不采以上现有方式,而采用3种方式的组合来减少时间测量误差:(1)尽可能增大接收回路放大倍数,使正弦波的前沿变陡峭,从而使整形后的脉冲前沿提前;(2)适当调整比较器门限电压,降低门限电压可使整形后的脉冲前沿提前,但要兼顾噪声抑制;(3)在进行前述处理的基础上,文中提出一种按回波脉宽计算滞后时间的方法,测量电路和计算都很简单,基本可以消除时间滞后误差。该方法原理如下:
图3中的虚线是发送的超声波周期,实线是回波宽度。图4表示发送波和回波前沿的相位关系。
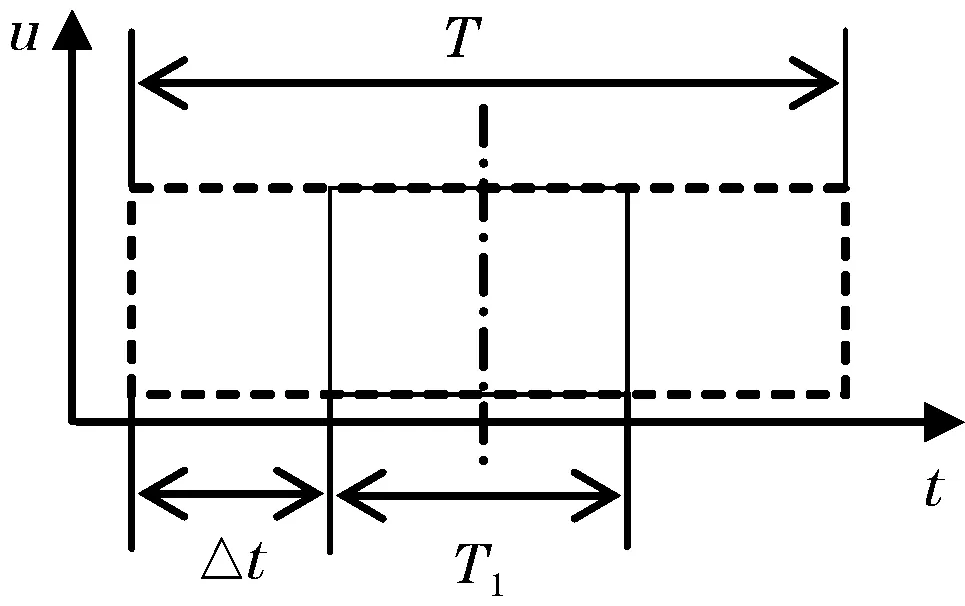
图3 超声波回波波幅衰减图

图4 发送波形与回波关系图
式中:T为发送的300 kHz超声波波族周期:
T1为测得的回波脉冲宽度;Δt为滞后时间。
显然有
(3)
(4)
计算实例:表1是对于不同距离,不同回波宽度,应用式(4)计算的结果。其中S1为无补偿时的距离值,S2为补偿后的计算值。

表1 补偿计算表
可见距离越远,回波脉冲越窄,时间滞后越多,补偿量越大。
2.1.3接收电路增益对距离测量误差的影响
接收电路增益越大,门限越低,波形超声波滞后越少。但是电路增益大,门限低,易引入干扰信号,造成更严重的误差。为此要根据系统噪声情况精心设置电路增益和门限电压值,使电路的增益尽可能大,门限尽可能低,但又不出现严重噪声。
2.1.4温度对距离测量误差的影响
超声波传播的介质温度对传播速度有较大影响。一般经验公式为:
cs=331.5+0.607T(m/s)
(5)
式中T为摄氏度,℃.
将式(5)代入超声波距离公式,对温度求导后有:
ΔS=0.335tΔT
(6)
此式表示温度检测分辨率与距离检测绝对误差之间的关系。
在600 mm测量范围内测得的声波传播时间不大于2 ms,系统采用的DS18B20数字温度集成电路的最高分辨率为0.062 5 ℃.代入可知,由温度测量误差带来的距离最大误差为0.0419 mm,故用DS18B20进行温度检测完全可以满足精度要求。
2.2超声波测距方案
该设计以单片机为主控制器,通过软件实现300 kHz超声波信号的产生,经驱动放大给换能器提供超声波发射信号。同时单片机启动计时器开始计时,超声波信号遇到障碍物后反射回来被同一换能器接收,经过放大、滤波、整形后触发单片机关闭计时器。再根据超声波测距原理,调用测试子程序,计算距离。超声波液位测量系统的硬件结构如图5所示。
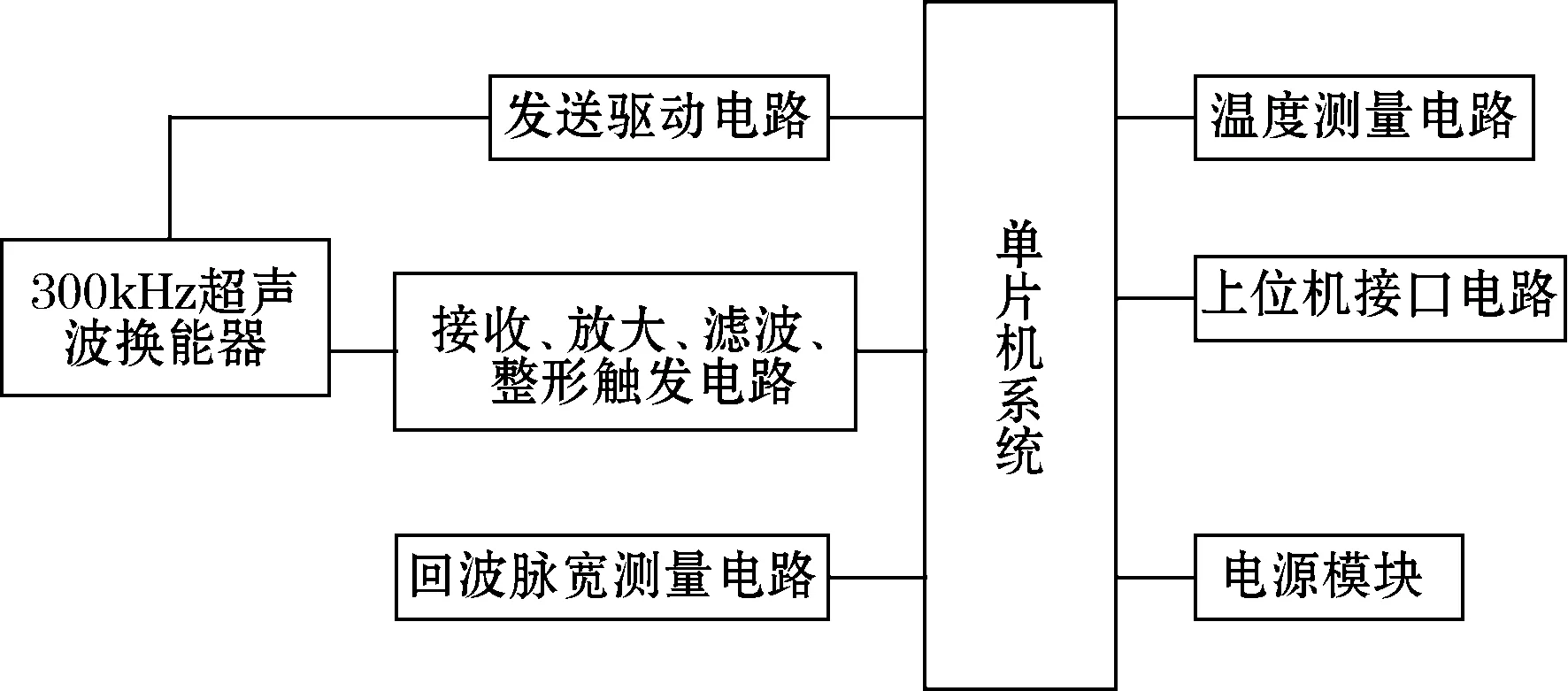
图5 硬件结构框图
3 系统各部分硬件设计
3.1微处理器选型与电路设计
微处理器的选择直接决定了系统的性能。MSP430F235单片机内部集成了超低功耗闪存、高性能模拟电路和16位精简指令集计算机(RISC)CPU.指令周期可达125 ns;工作电压为1.8~3.6 V,电流消耗很低,活动模式下,电流消耗330 μA,低功耗工作模式时,电流消耗可低至0.2 μA.片内资源丰富,含多个16位定时器,12位A/D转换器,通过软件可以选择片上通用I/O口中断功能的触发方式,支持汇编语言和C语言编程。设计中采用MSP430F235单片机的16 MHz钟频,可提高系统计时精度。
3.2超声波传感器选型与发射电路设计
为了追求安装的方便与更小体积,设计采用FUS300收发一体的压电式超声波探头,中心频率为300 kHz.
超声波发射电路包括超声波产生电路和超声波发射电路两个部分。设计选用软件发生法产生300 kHz超声波,通过输出脚引入至驱动器,经过驱动器后推动换能器发射超声波。相对于硬件发生法,这种方法的特点是充分利用软件,灵活性好,但需要设计一个驱动电流100 mA以上的驱动电路。
驱动电路采用推挽输出方案,剔除了笨重的输出变压器,可满足40 V/100 mA以上的驱动要求。
图6为超声波输出实测波形。
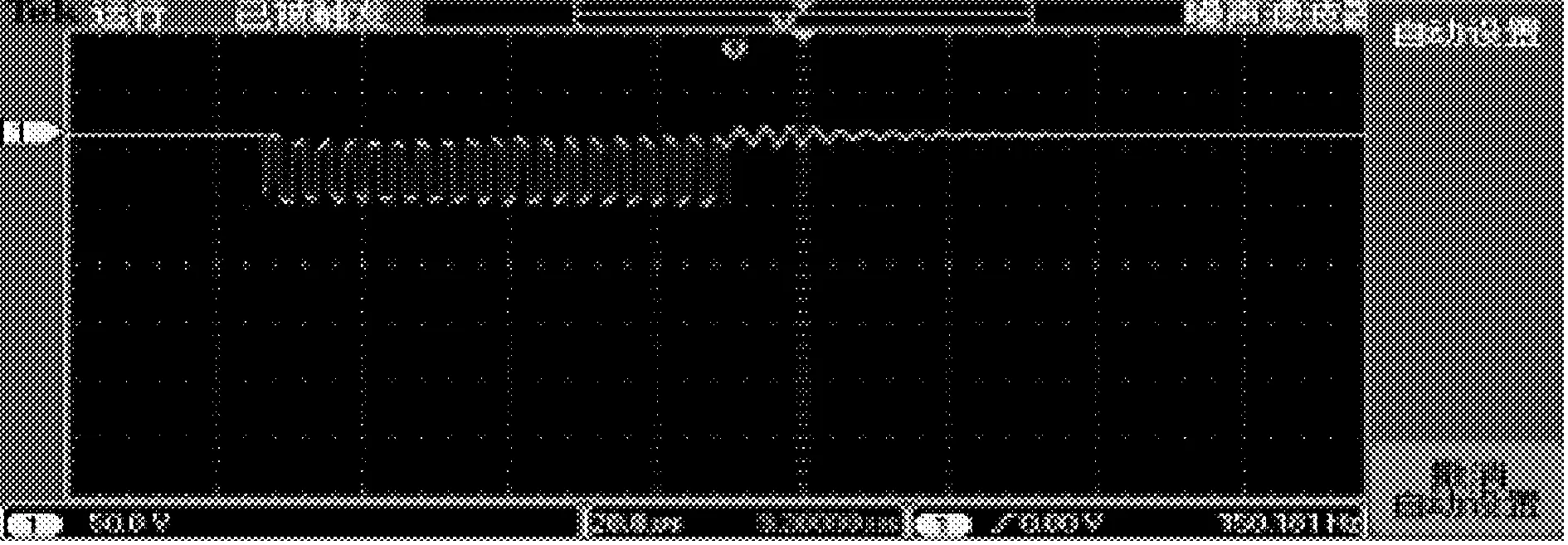
图6 300 kHz超声波输出波形
3.3超声波接收系统设计
根据电路的要求,接收电路必须满足要求:微弱信号放大,放大倍数要求可将mV级电压放大到10 V级电压;波形整形;产生单片机定时/计数器的启停控制信号。
设计的接收电路由6部分组成,电路组成如图7所示。第一部分为采用两级运算放大器组成的前置放大电路,将接收到的微弱信号放大至后续电路可以检测到的范围;第二部分是滤波电路,对信号中非300 kHz的噪声信号进行滤除,所采用的滤波器的中心频率计算公式为:
(7)

图7 接收电路结构图
第三部分为输出放大级;第四部分为限幅比较电路,可将接收到的强弱不一的信号转换成幅度一致的信号,采用电压比较器LMV331将模拟信号转换为脉冲信号,输出至JK触发器的K端;第五部分中JK触发器的输出Q送入单片机计时器,作为定时器捕捉时间的触发信号。第六部分为回波脉宽检测电路,将300 kHz脉冲群转换成方波以控制单片机定时/计数器的启停。
3.4回波信号宽度检测电路
电路将300 kHz脉冲群转换成方波以控制单片机定时/计数器的启停。电路采用AD650 V/F转换芯片组成F/V转换器。该芯片具有以下特点:
(1)工作频率高,V/F变换工作频率可达1 MHz;
(2)非常低的非线性度;
(3)输入电压范围大,输出方式灵活;
(4)既可做V/F 变换,又可做F/V变换;
(5)容易与标准逻辑电路或光电耦合器接口。
测量电路如图8所示。

图8 接收电路结构图
4 系统软件设计
4.1程序设计思想及测距装置工作原理
为了精确测距,该软件要完成的工作:(1)产生300 kHz超声波;测量超声波的传输时间t;(2)根据现场温度计算超声波的传输速度c;(3)为了进行温度补偿需要对温度进行精确测量;(4)文中采用了测量回波脉宽的方法来估算回波滞后时间,还要对回波脉宽T1进行测量。(5)上传、存贮和显示数据。该装置300 kHz的脉冲串由软件产生;对超声波的传输时间t的测量及回波脉冲宽度的测量采用单片机的定时/计数器完成;温度测量采用DS18B20完成。软件的工作就是对各个模块的工作进行协调。
超声波液位测量系统的软件设计主要由主程序、超声波发射模块、超声波接收模块、测温模块、通讯模块组成。软件设计的总体框图如图9所示。
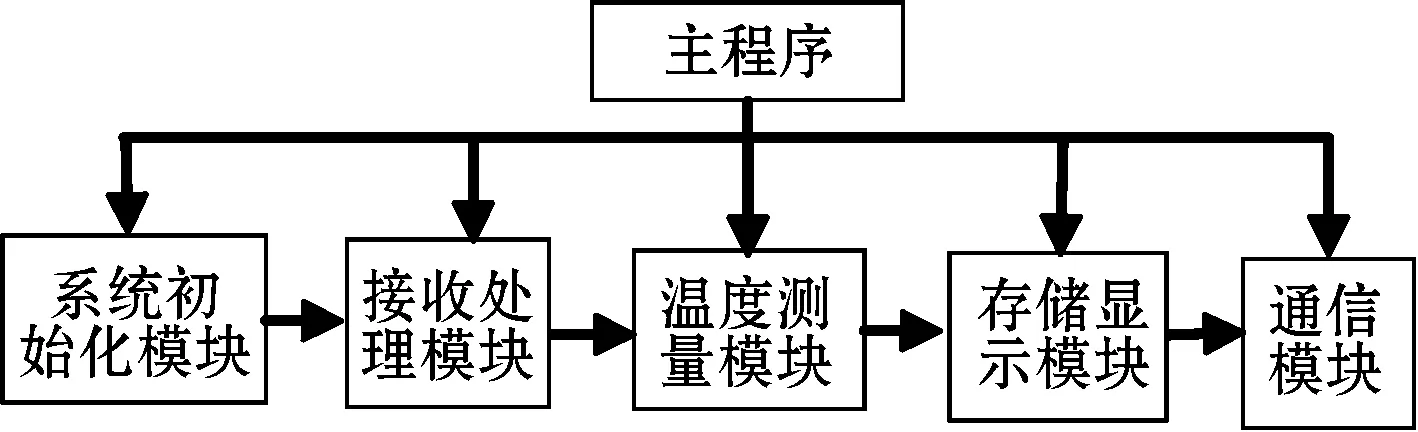
图9 软件设计总体框图
4.2主程序流程
主程序流程如图10所示。
主控器首先测量当前温度,接着发送超声波,在发出超声波的同时启动定时/计数器1工作;当超声波探头接收到回波信号时停止计时;由此得出超声波的来回传输时间t;当回波前沿到达时,启动定时/计数器2,后沿到达时停止计数器2,以测定回波脉宽T1.按经验公式(5)算出声速C,按式(4)计算距离S,存储显示数据。并经RS-485接口将数据传送到上位机处理、存储或显示结果。
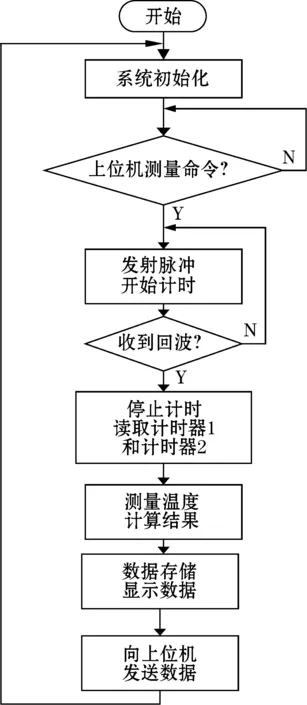
图10 主程序流程图
5 系统实验及结论
实验验证了该装置发送和接收性能良好,接收信号经过整形后,波形整齐。当距离变化时,接收的方波随之移动。收发波形见图11。

图11 收发波形图
文中对反射面为玻璃、水、柴油、机油和沥青的距离进行了密集测量。实验数据表明装置能稳定工作,对以上物质形成的反射,距离测量误差均能控制在±1 mm以内。
目前该装置可测距离范围为0~600 mm.可通过两个途径拓展测量距离:(1)加强超声波发射功率;(2)增加发送周期。
参考文献:
[1]王继红.超声波高精度微压差测量及应用:[学位论文].上海:同济大学,2008.
[2]张绪伟.高精度网络化超声波热量表的研究:[学位论文].济南:山东建筑大学,2010.
[3]陈先中,柳瑾.FMCW微波液位测量的快速频率估计算法.传感技术学报,2005,18(4):901-905.
[4]潘天放.高精度超声波液位计的研究:[学位论文].南京:南京理工大学,2009.
[5]任开春,涂亚庆.大罐液位仪的现状和发展趋势.自动化与仪器仪表,2002(4):4-7.
[6]李冬梅.国内外液位计量仪表技术发展动向.仪器仪表用户,2002(3):5-7.
[7]李萍.超声波液位测量仪的误差分析与抗干扰措施.交通科技与经济,2006(6):72-74.
[9]谢楷,赵建.MSP430系列单片机系统工程设计与实践.北京:机械工业出版社,2009.
[10]刘秀红,田志宏,果红军.超声波流量计的低功耗高精度时间测量方法.仪表技术与传感器,2009(10):43-44.
[11]顾红卫.高精度超声波微压差测量仪设计.电子工程师,2007,33(8):19-21;60.
[12]张建强,吉诗杰.简易超声波测距仪的设计与实现.仪器仪表学报,2009(5):23-25.
[13]秦旭.用LM92温度传感器补偿的高精度超声波测距仪.电子产品世界,2003(6):58-59.
