航测空三成果交互使用问题的探讨
2014-03-22江峻毅高兴国
江峻毅,高兴国
(山东电力工程咨询院有限公司,山东 济南 250013)
自动空中三角测量(空三加密)是根据少量的地面控制点来计算一个测区中所有影像的外方位元素和所有加密点的地面坐标。从空三处理成果数据流程而言,涉及航测数据处理的坐标系统主要有像平面坐标系、像空间坐标系、像空间辅助坐标系、物方空间坐标系和地面坐标系等多个坐标系统,数据成果包含像片内方位元素、外方位元素及加密点的像点坐标和物方坐标。空三数据成果的标准性、统一性,也是空三成果数据可以进行交互使用的前提条件。
2 不同像平面坐标系引起的空三成果交互使用问题的出现
摄影测量中,涵盖内方位元素的像平面坐标系定义为:一般以像主点为坐标原点,采用右手坐标系,和相对框标的连线作为x、y轴,其中x轴一般是接近航线方向的,相垂直的框标连线为y轴,用o-xy表示,所有像点坐标x、y数据都应归算到o-xy系统中。
当前普及速度越来越快的inpho软件,可便捷的设置和原始影像像素坐标系不同指向的像平面坐标系,导致空三数据成果与其他软件不通用,只有对空三加密成果进行正确的转换处理,才能实现与其他软件的交互使用。
3 工程实例分析
3.1 空三加密工程情况
现以inpho软件和VirtuoZo软件交互使用为例进行讨论,处理数据为山东菏泽某区域无人机数据,原始影像像素大小为5616 pixel X3744 pixel,像素大小6.41um,飞行方向为东西方向。原始影像见图1。

图1 测区原始影像图
依照航飞方向,山东菏泽无人机数据实际影像叠加效果和单像片像平面坐标系见图2。
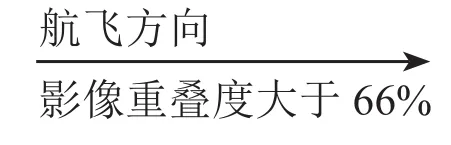
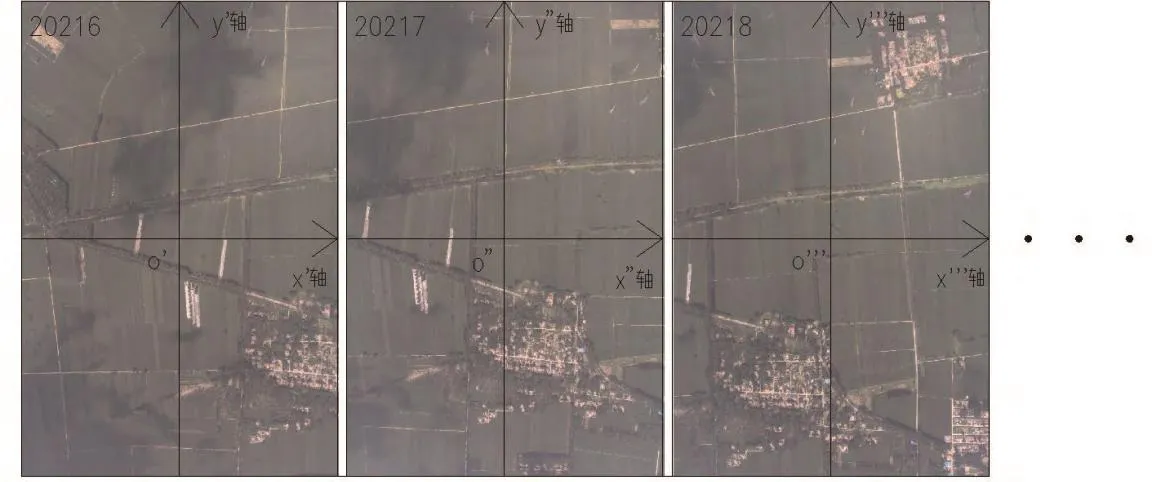
图2 测区内像平面坐标系
根据原始影像的尺寸大小,在VirtuoZo软件中,完成这个数据处理,需将无人机原始影像进行顺时针旋转90°,建立的像平面坐标系为:以像主点为坐标原点,航线方向为x轴,y轴与x轴相垂直,在本文中简称竖直方向像平面坐标系,即原始影像由水平方向的5616 pixel X3744 pixel尺寸,90°顺时针旋转为竖直方向的5616 pixel X3744 pixel尺寸,完成航带影像东西方向的叠加,叠加结果与实际保持一致。
依据上述作业流程,航测空三数据处理有关的五个坐标系统保持一致,VirtuoZo可以方便的导入inpho空三成果,自动创建立体模型,批量自动完成模型定向、核线重采样等工作,以及进行后续4d产品生产。
3.2 空三加密处理的像平面坐标设置
上述提及的影像旋转问题,inpho软件可以只通过其便捷的相机参数设置功能,通过设置不同指向的像平面坐标系,而不进行实际的旋转影像,实现航带影像间的叠加,并使其结果与实际保持一致,设置情况:
Image coordinate system.
The orientation of the image coordinate system is set to:
在inpho软件横线选项处,可选择四个不同指向的像平面坐标系,实现航带影像间的正确叠加。
在本工程中,inpho指定的影像像平面坐标系:坐标原点同样是像主点,而x轴和y轴的指向正好与VirtuoZo定义的竖直方向像平面坐标系差90°,y轴指向航线方向,x轴与航线方向垂直,本文简称水平方向像平面坐标系。可理解为在inpho中,可以设置像平面坐标系与原始影像像素坐标系之间的多种旋转关系,对影像进行了虚拟映射旋转(即原始影像保持水平不变),但同样完成了正确的航带影像叠加,结果与实际保持一致。
3.3 像平面坐标系差异引起的错误结果
在完成inpho空三处理结果后,将左右像对的加密点数据引入结果见图3。
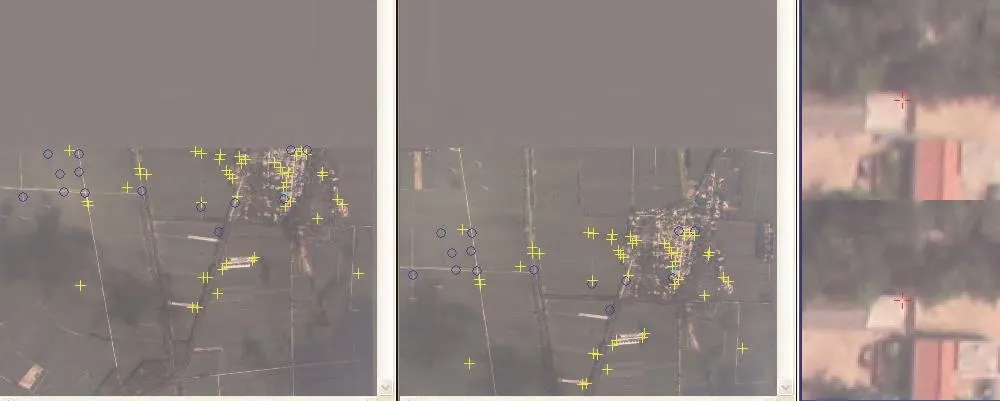
图3 侧区内像对加密点
各加密点匹配正确,数据导入无误,但存在的问题为:影像为inpho指定的水平方向像平面坐标系,与VirtuoZo使用的竖直方向像平面坐标系不一致,无法进行下一步的数据处理;如果此时仅对影像进行90°旋转处理,不对加密点数据进行旋转处理,导入VirtuoZo软件后,对应的影像正确,但加密点数据明显错误,也无法进行下一步的数据处理,见图4。
4 上述问题的原因分析和解决方案
4.1 原因分析
从对上述实例的分析,我们基本可以清楚,由于加密处理中,相机参数设置引起的空三数据交互使用问题实质是使用不同指向的像平面坐标系引起的交互问题。当空三加密过程是使用水平方向像平面坐标系(水平影像)处理,而交互到数据使用端立体采集中却使用竖直方向像平面坐标系(竖直影像)成果时,空三数据加密成果如不经处理,将导致引入数据和竖直影像不匹配。
只有保持航测空三数据处理中,相对应的五个坐标系统一致,才能满足两个软件间空三加密成果交互使用,如坐标系统不一致,将产生交互问题,只有进行正确的坐标转换,实现坐标系统的一致,才能实现空三成果的交互使用。
4.2 解决方案
根据上述分析,我们将水平影像顺时针旋转90°为竖直影像后,应根据像平面坐标系的实际情况对空三加密点数据进行相应的坐标转换,才能确保前后数据的一致。
本文中,加密点数据应以坐标原点为中心顺时针旋转90°,才能满足引入数据和竖直影像的相匹配,根据90°旋转的换算公式计算,转换前与转换后加密点数据坐标值对比见表1。
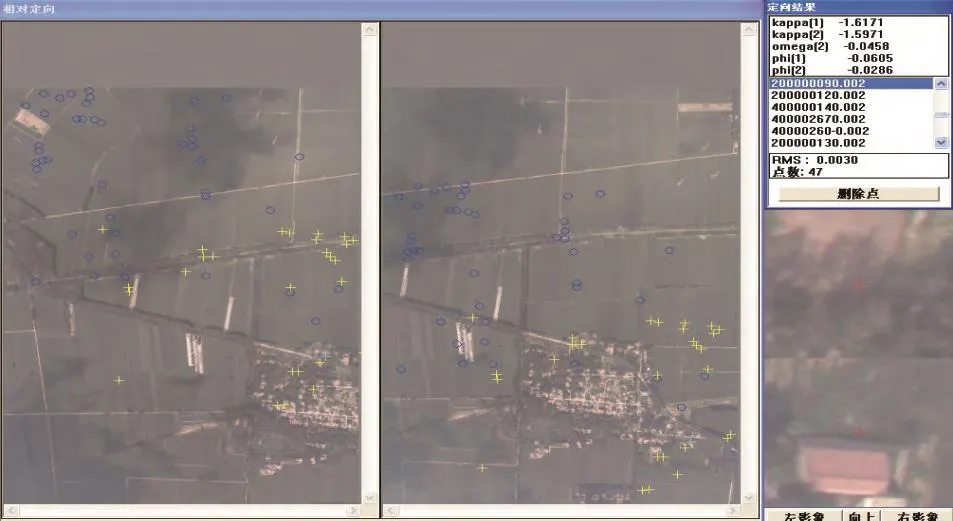
图4 导入VirtuoZo软件后的像对加密点
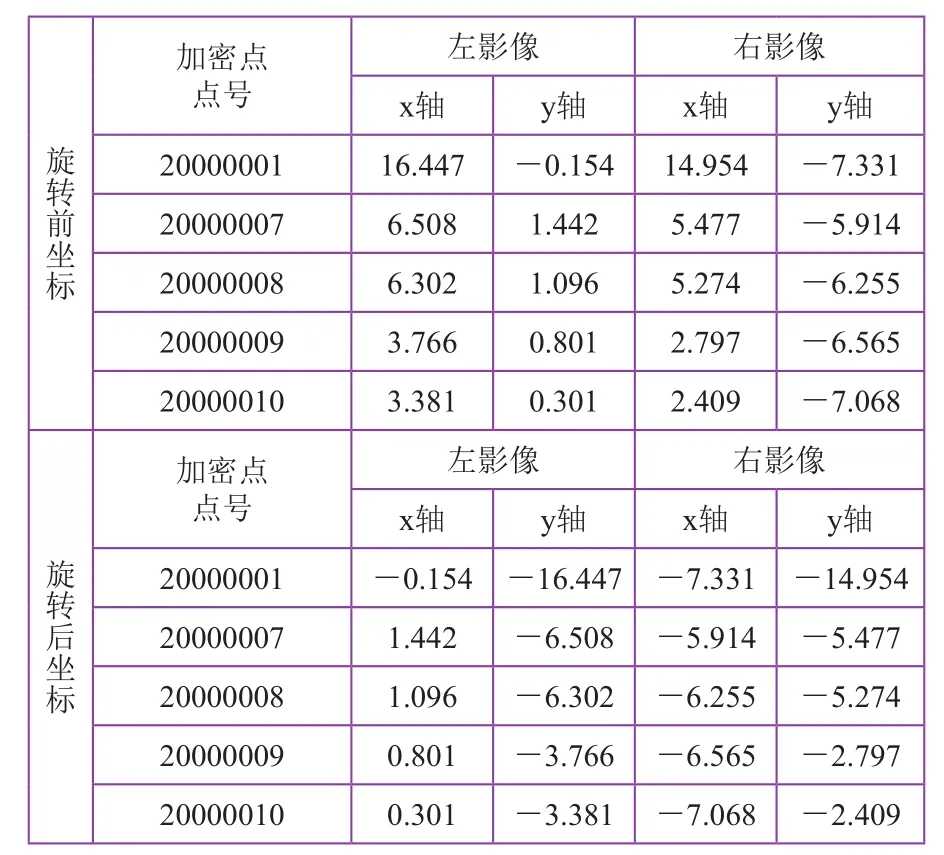
表1 转换前与转换后加密点数据坐标值对比
将处理后加密点数据导入至VirtuoZo软件,匹配结果见图5。

图5 加密点数据处理后导入VirtuoZo软件匹配结果图
各加密点匹配正确,数据引用无误,对应像平面坐标系正确,且影像为竖直方向的3744×5616大小,能建立好每一个立体像对的立体模型,满足VirtuoZo软件的处理要求,可以顺利的进行下一步数据处理。
4.3 编制相应的数据转换软件
根据旋转的计算特点,编写对应的处理软件,实现快速便捷的数据转换,实现数据的交互使用。
软件可对旋转的度数、导入的像对数选择性的设置,以满足不同需要,彻底解决由于像平面坐标系引起的空三数据的交互使用问题。
5 结语
空三加密成果的交互使用很好的促进各种航测软件发展。在交互使用过程中,应保持两者间数据的统一性和一致性,当出现不一致问题时,应从数据处理流程着手,分析问题的根本所在,找出数据差异的原因,经过正确的坐标变换,使交互使用的空三加密成果一致起来,确保交互使用的正确性。
[1]王佩军,徐亚明.摄影测量学(第二版)[M].武汉:武汉大学出版社,2010.
[2]张祖勋,张剑清.数字摄影测量学(第二版)[M].武汉:武汉大学出版社,2013.
[3]方诗明,姬海莉.数字摄影测量空三加密精度控制实践与探讨[J].测绘标准化,2006,22(3).
