新型的激光测距仪设计及关键技术研究
2014-03-21王史春
王史春
(1.台州职业技术学院计算机工程系,浙江台州 318000;2.工业控制技术国家重点实验室,浙江大学智能系统与控制研究所,浙江杭州 310027)
0 引言
国产激光测距仪受制于光学器件和集成电路等方面的关键技术,测距精度尚难企及发达国家同行的水准,同时仪器的可靠性和可维护性方面也略显欠缺,从而导致市场竞争力的匮乏。赢得市场的出路有两条:一是细分市场,立足用户的特定需求,规划差异化、个性化的设计;二是基于国内现有技术条件,从激光测距仪的系统架构、设计方法与器件应用方面切入,提高激光测距仪的精度和可靠性。文中就是基于以上的理念,根据市场的需求,分析现有测距仪的结构和产生相位误差的原因,提出基于分时式激光测距仪算法,改进结构,提高测距精度和可靠性。
基于分时机制设计激光测距仪,测距仪通过一套光电测量线路分时完成2套或3套光电测量线路的功能,除测量距离的光路外、参考信号和测距信号自始至终经同一信号通路。因此,两者的相位差只与测量距离有关,是理想的参考/测距信号相位差。同时,电子器件参数离散性和温变特性引起的相位误差也将不复存在。虽然激光测距仪的光路和电路模块存在不可避免的、或大或小的相移,但分时机制下参考信号和测距信号求相位差时,光路和电路模块的附加相移(误差)相互抵消,从而提高了测距精度。
1 测距仪误差分析
调制频率确定条件下的相位式激光测距仪误差为
(1)
式中:L为待测距离;c为光速;f为调制频率;φ为相位。
激光测距仪的主要误差是测相误差,改进测相误差的努力从未间断[1],迄今改进工作大多聚焦在参考/测距信号相位差的检相环节,“改进”对局部(检相环节)有效,但就全局(激光测距仪的测距精度)而言却相当有限。进一步的全面深入研究指出,“改进”提升测距精度有限的原因是:误差不仅仅是检相环节的问题,更多的是输入检相环节的参考/测距信号的质量。理想的参考/测距信号相位差取决唯一的因素,即测量距离,但实际“参考/测距信号”的相位差却是多种因素共同作用下形成的,现结合相位式激光测距仪的相位差和误差原理示意图1[2],分析“误差”的源由。
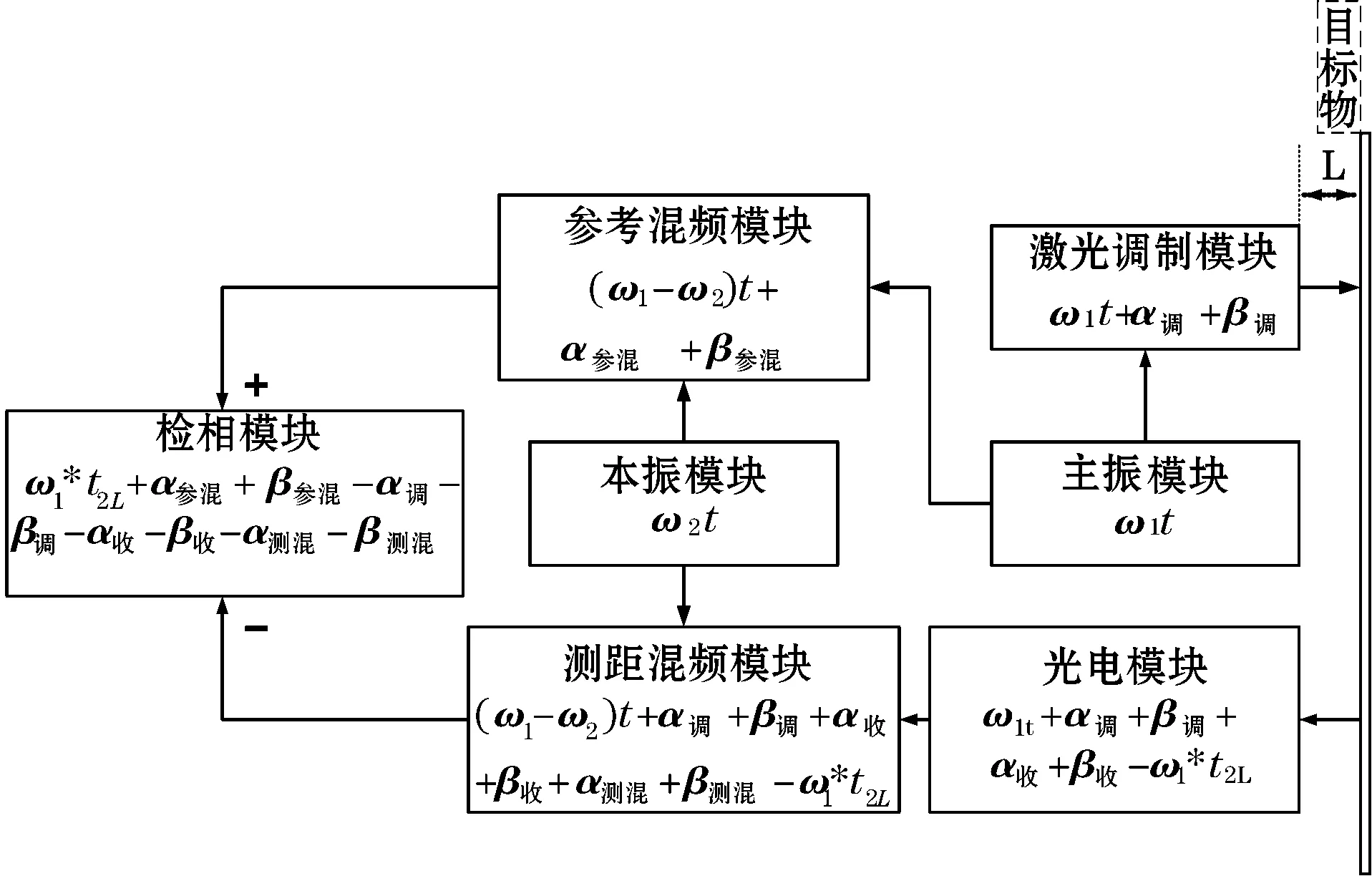
图1 相位差和误差原理示意图
平行工作模式是相位式激光测距仪的基本特征,即采用同时生成参考/测距信号的激光测距仪架构。为表述简洁,激光测距仪的主振DDS模块和主振七阶椭圆滤波器模块合并简称主振模块,本振DDS模块和本振七阶椭圆滤波器模块合并简称本振模块,设主振模块、本振模块为激光测距仪的理想模块,即不产生附加相位。光电检测模块和带通滤波模块合并简称光电模块,光电模块存在2项附加相位:理想光电转换器件(器件参数无分散性、且与外部环境无关)条件下,光电转换过程产生的相位α收及实际光电转换器件产生的随机相位β收。参考混频器模块和参考信号调理滤波模块合并简称参考混频模块,参考混频模块存在2项附加相位:理想混频器件条件下,混频过程产生的相位α参混及实际混频器件产生的随机相位β参混。测距混频器模块和测距信号调理滤波模块合并简称测距混频模块,测距混频模块存在2项附加相位:理想混频器件条件下,混频过程产生的相位α测混及实际混频器件产生的随机相位β测混。激光调制模块存在2项附加相位:理想调制器件条件下,调制过程产生的相位α调及实际调制器件产生的随机相位β调。其余符号的说明:主振频率为ω1;本振频率为ω2;差频为ω3,ω3=ω2-ω1;主/本振模块信号的初始相位为φ0,φ0=0;测量时间为t2L;测距为L,L=0.5c×t2L;参考/测距信号的理想相位差为φ,φ=ω1×t2L,φ∝L.
因此,相位式激光测距仪的理想相位差φ=ω1×t2L,但实际获取的相位差是:
φ1=ω1·t2L+α参混-α调-β调-α收-β收-α测混-β测混
(2)
显然φ1=φ.目前,提出了众多改进测距精度的技术[3],但相关技术仍存在诸多的局限。
(1)测距精度与调制频率并非简单的正比关系,而呈非线性关系:调制频率上升,电路元器件的非线性和带宽的限制降低了光强的调制深度,激光光波的强度随调制频率的增加产生越来越大的变形;同时高频电路分布参数产生的相位变化变大,且不易补偿,不难得出:参考/测距信号的相位差与调制频率、激光测距仪的电/光路器件有关。
(2)相位式激光测距仪的系统架构存在结构性缺陷。参考信号由主振频率信号和本振频率信号直接混频生成;测距信号的生成步骤则依次为:主振频率的电信号借助激光调制电路调制激光,发射调制激光和接收目标反射激光,反射激光经光电探测器将激光信号转换至电信号,电信号通过信号调理模块再和本振频率信号混频。因此,参考/测距信号的相位差中包含了与测量距离无关的附加相位移,除测量光路外,参考/测距信号的光路和电路存在不一致,而光电信号在不同光路和电路传输时会产生附加相移;此外,实际光电器件的参数具有分散性、温变特性,导致附加相移具有随机性、不确定性,随外界环境、元器件参数的变化而变化,给测量精度造成了负面影响。消除附加相移的惯常手段是在激光测距仪原光路(外光路)的基础上增设1套长度已知的光路——“内光路”,内光路探测器接收激光器分光镜输出的激光,获内光路的测量值,参照内光路测量值校正外光路(激光测距仪)测量值,消除电光/光电转换和电路系统产生的相位误差。式(2)中的附加相位移(除φ外),提高了测距精度。增设内光路有助于测量精度的提高,但增加了测距仪的复杂度、成本和运维工作量;因此,内光路仅在高端激光测距仪中有少量应用。
(3)激光测距仪系统架构的结构性缺陷还表现在:参考/测距信号分别由2套独立的混频模块、调理模块、A/D模块并行同时生成,电子元器件参数的离散性和温变特性,必将影响测距系统的综合精度;必须指出内光路技术无法消除电子器件参数离散性和温变特性引起的相位误差,即式(2)中的附加相位移(除φ外)。
2 系统设计
对于分时式激光测距仪设计的思想,民用短距激光测距仪有别于军用,其测量速度即测量时间达到的技术指标在实际应用中有太多的余量,0.01 s测量时间与0.02 s测量时间的差异丝毫不会影响用户的体验,毕竟人的最小时间分辨率是0.5 s;如能通过测量速度的酌情降低来换取精度和稳定性的大幅提高,必将全面提升民用短距激光测距仪的技术指标,这正是文中引入分时机制进行测距仪创新设计的依据和基石,遵循的是:根据用户的需求进行差异化结构设计的理念。
系统的整体设计如图2所示,分时式激光测距仪由发射单元、接收单元、检相主控单元、按键、LCD和反光镜驱动辅助单元组成;按键、LCD和反光镜驱动辅助单元包括按键模块、LCD模块、反光镜驱动模块,反光镜驱动模块则由微型电机、反光镜和反光镜驱动机构组成;检相主控单元的核心是内嵌A/D接口的Atmega128芯片,包括信号检相模块和主控模块;接收单元包括光电捡测模块、带通滤波模块、混频器模块、信号调理滤波模块,发射单元包括主振DDS模块、主振七阶椭圆滤波器模块、激光调制模块、本振DDS模块、本振七阶椭圆滤波器模块[4]。
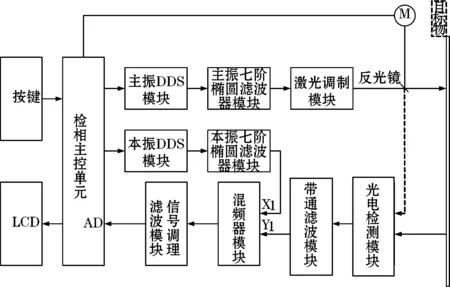
图2 系统结构图
2.1算法及关键技术
短距激光测距仪的额定测程20 m,对应的主振频率即测尺频率为7.5 MHz,令主振与本振的差频15kHz、则相应的本振频率取7.485 MHz;因此,检相主控单元Atmega128通过AD9835的SCLK、SDATA和FSYNC 3个引脚写入命令,预置主振与本振的频率,主、本振频率值SDATA7.5 MHz=0*27FFFFFF、SDATA7.485 MHz=0*27EB851E.该项目关键技术有2个:一是通过分时式算法,消除相位误差;二是混频器技术,在相位差不变的前提下,提高测距精度。
2.1.1算法设计
为了消除传统的信号经过二路或多路引起的相位误差,提出新型的结构设计思想,即采用分时机制,让参考信号和测距信号始终走同一条路,具体的算法设计,如流程图3所示。
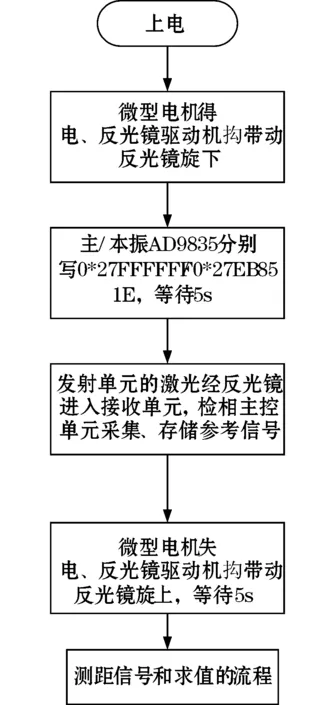
(a)获取参考信号的流程图
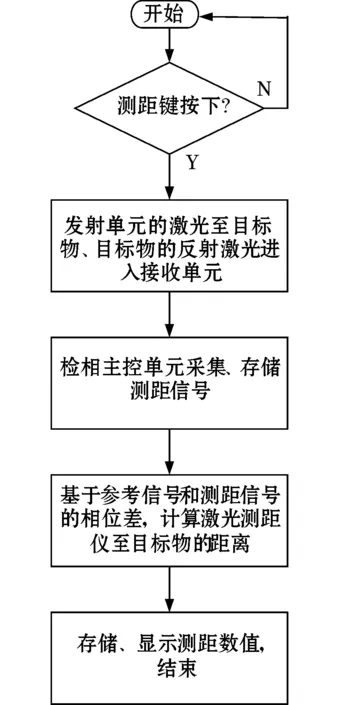
(b)获取测距信号和求值的流程图
由算法可知,参考信号所经过的通路中,参考信号产生相位误差主要有
测距信号所产生的相位误差主要有
φ2=α参混+β参混+α调+β调+α收+β收
(3)
测距信号所产生的相位误差主要有
φ3=α测混+β测混+α调+β调+α收+β收+ω1·t2L
(4)
由于参考/测距信号在同一混频器上混频,因此,
α参混+β参混=α测混+β测混
(5)
所以,总的相位差为
φ=φ3-φ2=ω1·t2L
(6)
分时式算法消除了相位误差,提高了测距精度。
2.1.2混频器设计
对于相位式激光测距,相位测量一般采用差频测相技术[5-7],即把高频信号转化为低频信号,提高测距精度。
混频器电路设计如图4所示,输入端分别为X1、Y1,输出端为W,令发射信号为:
U1=Acosω1·t
(7)
U2=Acosω2·t
(8)
式中:U1、U2分别为主振信号和本振信号;A为振幅;ω1和ω2为角频率,它们的值分别为15π和14π.
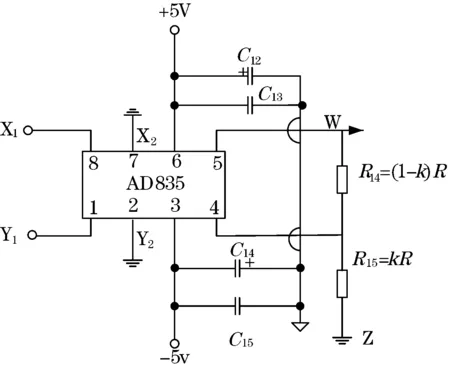
图4 混频器电路
把本振信号和发射信号输入到混频器芯片AD835的X端和Y端,输出端W的混频信号,经低通滤波器滤波,滤掉高频部分,得到:
α收+β收)]
(9)
把本振信号和接收信号输入到混频器芯片AD835的X端和Y端输出的混频信号,输出端W的混频信号,经低通滤波器滤波,滤掉高频部分,得到值分别为:
α测混+β测混-ω1t2L)]
(10)
经混频后的U1D和U2D的相位差φ=ωt2L=Δφ,即相位差是不变的,但测试点降低了M=f/(f-fc)倍,测相精度相应提升了M倍。
3 仿真实验
实验在MATLAB环境中仿真,参数设置如表1所示,通过对相位式激光测距和分时相位式激光测距仪构建仿真系统(两者Delay设置不同),如图5所示,仿真系统由2部分组成,即参考信号部分和测距信号部分。
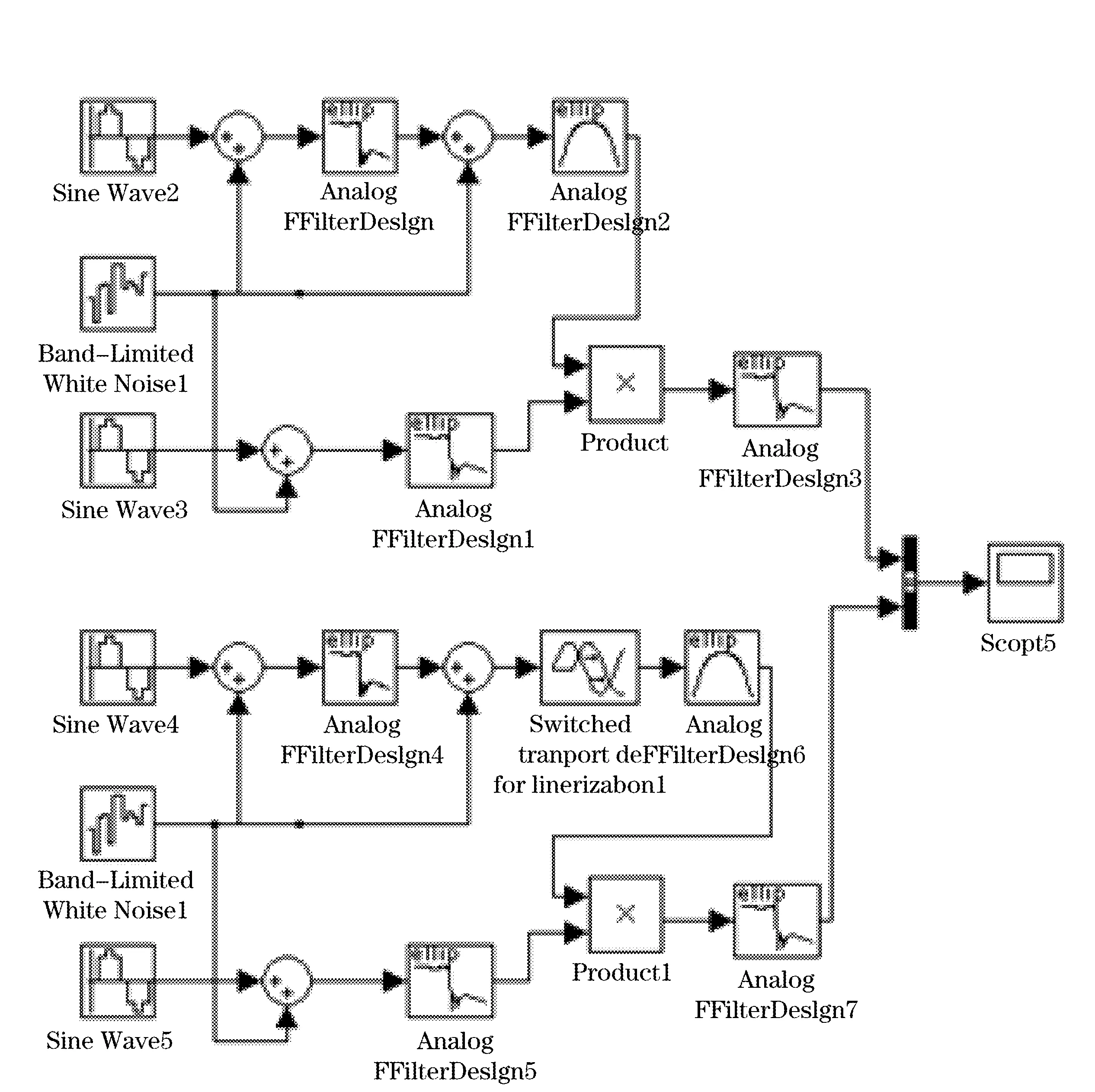
图5 系统仿真
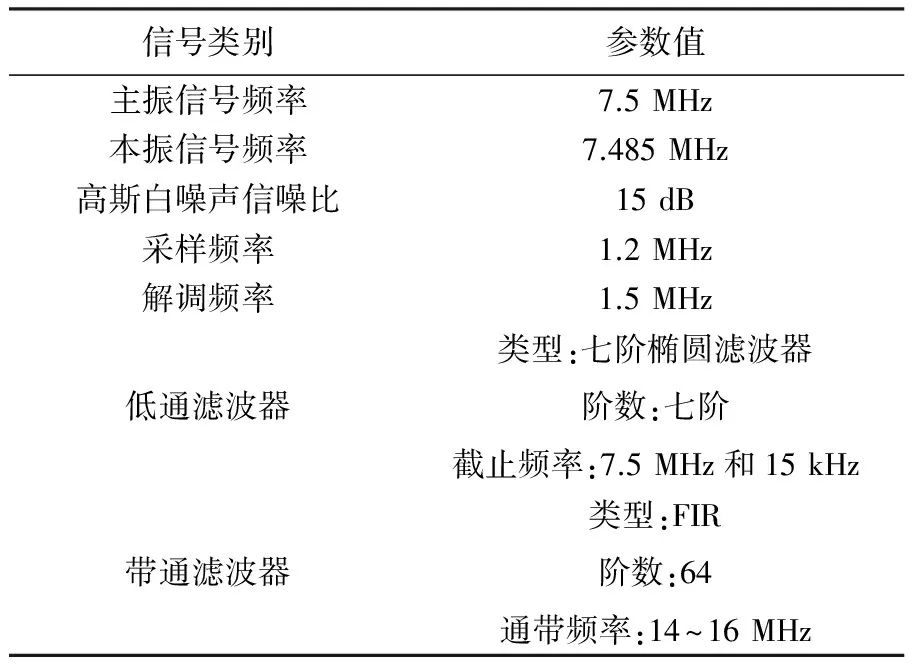
表1 仿真参数设置
(1)信号产生模块。产生主振信号和本振信号。在信号中加入一定的信噪比的高斯白噪声(高频),经过七阶椭圆滤波器进行低通滤波。
(2)接收信号模块。加入一定信噪比的高斯白噪声,信号经过一定的延时,作为激光接收信号。
(3)本振信号处理模块。把参考信号和本振信号混频,通过低通滤波器,滤掉高频信号,输出低频信号,输入到测相模块中。
(4)接收信号处理模块。由2个模块组成,一个模块是测距信号和本振信号的混频,通过低通滤波器后,获取一个低频测量信号(15 kHz);模块二将接收信号经过一个带通滤波滤波。
(5)相位测量模块。由2个子模块组成,一个是分时式激光测距仪测相,另一个是传统激光测距仪的测相,在Matlab中进行数据处理[8-9],计算测相误差和精度。
测试结果如图6所示。在相同的条件下,传统激光测距仪测相误差在-2.5°~0.5°之间,分时式激光测距仪测相误差在-0.15°~0.05°之间。将程序运行4次,得到测相误差统计如表2、表3所示,从表中可知,分时式激光测距仪的平均测距误差在1 mm左右,相位式激光测距仪测相平均测距误差在3 mm左右。
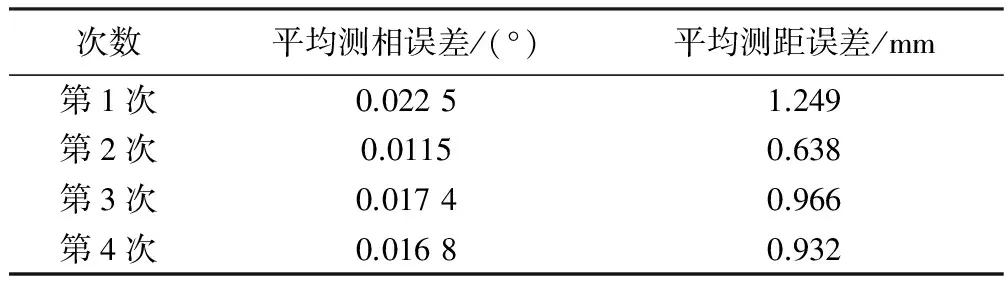
表2 分时式激光测距仪

表3 相位式激光测距仪
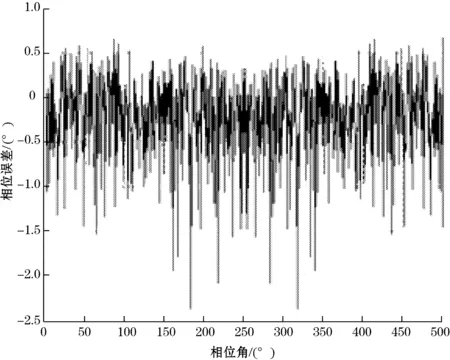
(a)相位式激光测距仪
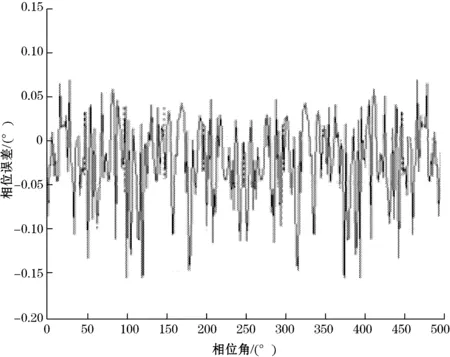
(b)分时式激光测距仪
4 结语
通过对现有的相位式测距仪结构的改进,提出分时式激光测距仪的结构,提高相位误差精度,从而提高了分时式激光测距仪测距精度。分时式激光测距仪适用于短距离的测量,特别对于测算房屋面积、机器人测距等方面应用有一定的前景。当然也有一些需解决的问题:
(1)分时式激光测距仪利用速度换精度的思路,如何提高速度在更大领域得以应用需进一步研究;
(2)分时操作的精度不仅是相位之差,其实在时间t有一定的误差,需提高时间t的一致性,需进一步研究。
(3)测距的精度还在于产生信号波的频率和精度,DDS能产生高精度的正弦波,但信号由于经过各元器件产生的误差存在,所以滤波质量的高低,也会影响测距精度。其次信号的频率也会影响精度,这与测距仪测尺距离有关。
参考文献:
[1]丁燕.相位法激光测距仪设计及其关键技术研究:[学位论文 ].上海:同济大学,2007.
[2]迟亮.便携式相位半导体激光测距仪的研究:[学位论文].长春:长春理工大学,2009.
[3]胥俊丞.新型相位激光测距仪的研究:[学位论文].西安:西安电子科技大学,2008.
[4]杨健.基于DDS的激光测距仪硬件研究与设计:[学位论文].长沙:国防科学技术大学研究生院,2008.
[5]POUJOULY S,JOUMET B,PLACKO D.Digital Laser rangefinder:phase-shift estimation by undersampling technique.Proceedings of Industrial Electronics Society,1999,IECON’99,IEEE,3,1999.
[6]POUJOULY S,JOUMET B,PLACKO D.Laser Range Finder based on Fully Digital Phase-shift measurement.Proceedinds of the 16th IEEE,1999:24.
[7]汪友生,徐小平.相位法激光测距的实现.北京工业大学学报,2003(4):424-427.
[8]郭仕剑.MATLAB7.X数字信号处理.北京:人民邮电出版社,2006.
[9]陈来勇.MATLAB信号处理详解.北京:人民邮电出版社,2001.
