机载LiDAR点云更新1∶1万DEM关键技术探讨
2014-03-20张金盈胡小庆张广庆
张金盈,胡小庆,张广庆
(山东省国土测绘院,山东 济南 250013)
0 引言
1∶1万DEM更新是山东省1∶1万基础地理信息数据库更新工程的重要组成部分,是山东省“十二五”测绘规划的重要内容之一。数据高程模型DEM(Digital Elevation Model),是以数字的形式按一定结构组织在一起,表示实际地形特征空间分布的模型,是定义在x,y域离散点(规则或不规则)上以高程表达地面起伏形态的数字集[1]。
激光雷达(Light Detection And Ranging,LiDAR)技术是集激光、全球定位技术(GPS)和惯性导航(INS)3种技术于一身的系统。机载激光雷达是一种主动式对地观测系统,它具有控制测量依赖性少、受天气影响小、自动化程度高、成图周期短等优点,利用机载LiDAR可快速获取大量密集的三维点云,点云数据中每个三维数据都是直接采集目标的真实数据,所以无需任何实物表面的处理,使得后期处理的数据完全真实可靠,非常适合高精度DEM的制作[2-3]。
TerraSolid是芬兰TerraSolid公司开发的一套专门处理LiDAR点云数据的软件,适宜对上百万个三维点云进行分类与模型构建等工作。
1 用TerraSolid软件对激光雷达点云数据进行后处理流程
激光点云后处理是指将点云预处理得到的激光点云文件经过噪声点滤除、自动滤波分类、切除航带重叠、人工编辑分类等步骤,得到最终地面点点云,由地面点生成高精度DEM。TerraSolid软件对点云进行后处理的流程如图1所示。
2 TerraScan提取地面点的滤波算法及地面点提取算法的组合运用
LiDAR点云滤波指地面激光脚点与地物(主要指人工建筑物、植被、动物、车辆、行人等)激光脚点分离的过程[4]。TerraSolid软件(主要指TerraScan)提取地面点采用自适应TIN滤波法[5]。算法具体执行如下:
(1)将LiDAR点云数据集合细分为方格网,将每个方格网中最低点做为相应格网地面种子点,构建一个地面种子点集合。格网最小尺寸要大于采集区域非地面目标(一般指测区内的最大建筑物),利用Delauney三角网算法根据地面种子点构建TIN。
(2)根据点到三角形表面的距离和候选点(临近种子点)到3个顶点的角度最大者(在三角形表面和连续候选点和三角形顶点的线)来区别TIN表面点是否为地面点。如果距离和角度小于预先定义阈值,该点加入地面点集合。角度阈值用来控制靠近陡峭斜坡地面点,为了保留陡峭地形(如悬崖)的测量点,使用到相应表面镜像点的距离,尽可能保留地面点(图2)。
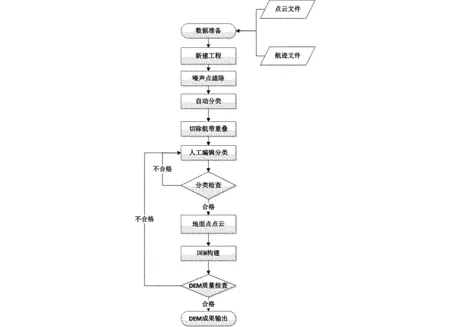
图1 点云数据后处理流程

图2 自适应TIN滤波算法原理
(3)使用地面点集合建立新的TIN,重复(2)、(3),直到没有点被加入地面数据点集合[4]。
上述算法有3个前提条件:①非地面点均高于地面点;②激光可穿透树林到达地面;③地形坡度不会过大。然而这3个条件在现实中并不能全部满足,激光在植被密集区域一般很难或只能部分穿透树林到达地面,此过程中会产生多次回波,导致种子点的选取造成误差。
激光回波特性:裸露地表处有且只有一次回波,此次回波对应的反射点即为地面点;植被覆盖区域可能对应多次回波,正常的地面点是最后一次回波对应的反射点[6]。根据此特性,可实现对点云进行逐步过滤的回波算法:将只有一次回波和多次回波的末次回波的点,归类到可能的地面点层用于选取种子点,而其他的点云则被排除在外。这样就大大提高了种子点提取的正确性。
3 自适应TIN滤波算法的缺陷及其人工修正
在现实中,地形经常出现起伏较大情况,如悬崖、梯田、沟、坎、堤坝以及高出地面的道路边沿。由此引出自适应TIN滤波算法缺陷:容易将这些地形处地面点错误过滤到非地面层,即地面点不完整,导致地面激光点云反映地形真实性降低。为此,结合TerraSolid软件功能,在人工编辑分类之前应首先进行自适应TIN滤波算法人工修正,具体做法如下:用自动分类后地面点云构建TIN模型,将错分到非地面层点云可视化显示到模型表面上,然后用TerraScan的Classify Using Brush功能沿着上面提到可能有错分点的地形起伏处将显示的点云归类到地面层。
4 特征线特征点参与DEM构建
用分类完成后地面点进行构建DEM过程中,在某些特殊地形处(如水域边界、桥梁两端处)由于缺少详细细节信息,构建的DEM不能满足技术规范要求。通过添加特征线或特征点能有效解决这一问题。
DEM制作时,静止水域(如湖泊、池塘等)要求进行置平处理[7],而实际获取的点云水域边界点往往高程不一致或者水域临近陆地处有植被等遮挡造成水面不平。水域置平具体做法是:通过地面点范围以及模型判断水域准确边界,沿着该边界加入闭合不规则多边形,根据水域边界相邻点云高程信息计算出该水域边界特征线高程,然后将水域边界里所有地面点归类到非地面点层,将上述特征线加入到最终地面点构建DEM即可将静止水域置平。
桥梁的处理方法与静止水域处理类似,在桥梁两端处各加入一条拟合桥面上高程及拟合桥底岸边高程的特征线,将这些线参与DEM构建,能解决桥梁两端处构建DEM时因无约束插值造成过滤桥面后桥梁部分出现错误插值问题。处理前后效果见图3。

图3 特征线参与构建DEM实验
5 激光点云time stamp属性修复
机载LiDAR获取的点云相邻航带之间都存在不同大小航带间高差,即拼接误差。经过点云预处理,拼接误差应在误差允许范围内,然而实际作业过程中出现航带拼接误差超限的情况。TerraSolid系列组件中的TerraMatch提供了运用tieline在后处理过程中解决航带拼接误差的方法,运用这一方法的前提是激光点云跟航迹信息准确匹配。实际生产中,由于作业人员误操作等原因,常造成分类完成点云丢失time stamp属性,而缺省time stamp属性激光点云无法与航迹匹配,进而无法提取出tieline,以至于无法在后处理阶段消除航带间高差。
激光点云time stamp属性修复思路如下:人工编辑分类前点云数据(事先做好备份)具有完整time stamp属性,通过点云空间信息(X,Y,Z坐标)将人工编辑分类前后点云进行空间位置配准。通过设置距离阈值(该阈值足够小,小于任意相邻激光点间的空间距离,机载LiDAR获取的激光点云间距一般在分米级到米级,此条件易满足),可准确地将2个点云文件里的点云进行空间上一一配准,再通过空间位置将人工编辑分类前点云time stamp属性赋值给人工编辑分类完成的点云。
6 人工编辑分类完成后对点云航带间高差超限的补救性处理
TerraMatch的tieline功能校正航带拼接误差原理是:首先用地面点提取算法按独立航带提取地面点,地面点在航带重叠处地面点也相应重叠,这是搜索tieline必要条件。搜索tieline过程就是对重叠地面点寻找共面的过程。剔除误差过大tieline,运用检查正确的tieline计算改正参数,将改正参数应用到点云数据,航带拼接误差就能得到校正。如果一次实验tieline改正效果不佳,可调整参数重新搜索tieline,重复上述步骤,直到改正效果达到要求。人工编辑分类完成后,点云分类信息已经固定,而且航带重叠点也已经切除,因而不能通过常规搜索tieline步骤对点云数据进行校正。人工编辑分类完成后对点云航带拼接误差超限的补救性处理思想是:将切除航带重叠步骤得到的点云(overlap层)作为初始点,用第2部分中提到的算法组合从overlap层里提取出航带重叠处“地面点”放入ground_overlap层,选择ground层和ground_overlap层作为地面点数据,这样就满足搜索tieline的条件。按照常规tieline校正步骤对点云数据进行改正,多次试验满足精度要求之后将ground_overlap层点云返回到overlap层,如此实现在不改变点云分类信息条件下对点云航带拼接误差进行补救性处理。
7 结语
该文结合用TerraSolid软件对激光雷达点云数据进行后处理流程,探讨了此过程中几个关键技术,主要目的是提高点云数据后处理的效率,并解决实际生产过程中遇到的一些特殊问题,减少人工编辑的工作量。
参考文献:
[1] 潘正风,程效军,成枢,王腾军,宋伟东,邹进贵.数字测图原理与方法(第二版)[M].武汉:武汉大学出版社,2009.
[2] 靳克强,龚志辉,王勃,汤志强.机载激光雷达数据提取DEM的关键技术分析[J].测绘工程,2010,19(6):39-42.
[3] 白立飞,潘宝玉,张兰.三维激光扫描技术在数字矿山领域的应用[J].山东国土资源,2013,29(8):46-49.
[3] 王刃.机载LiDAR数据滤波与建筑物提取技术研究[D].郑州:信息工程大学,2008.
[4] 林明华.机载激光雷达点云数据处理理论与应用研究[D].武汉:武汉大学,2008.
[5] 许晓东,张小红,程世来.航空Lidar的多次回波探测方法[J].武汉大学学报(信息科学版),2007,(8):778-781.
[6] 国家测绘地理信息局.(CH/T8023-2011)机载激光雷达数据处理技术规范[S].