内部轮廓超声成像系统的设计
2014-03-18李勇峰张艳花杨录
李勇峰,张艳花,杨录
(中北大学信息与通信工程学院电子测试技术国家重点实验室,山西太原030051)
内部轮廓成像大都采用摄像头直观成像,但在低能见度、高粉尘的环境中(如煤矿巷道),这种直观成像方法精度较低,稳定性较差。文中采用三通道时差法增益补偿测距方法,实现了大量程、高精度的超声波测距,并通过上位机软件实现对内部轮廓的实时呈现。三通道时差法的应用很好解决了内部轮廓表面不平坦对成像精度的影响,在公路隧道成像、煤矿巷道探测、曲面仿形检测等领域广泛应用。
1 内轮廓成像系统的模型
内轮廓超声波成像系统的模型如图1所示,假定图中圆柱体为待测物体内部轮廓,内轮廓超声成像系统是由a、b、c 3 个超声波传感器组成的三通道探头组在物体内部实施同一位置探头组360°旋转高速测距,利用电机每隔46 ms 向前推进10 mm,测得一组数据,数据及时传输到内轮廓数据处理系统进行数据处理,通过上位机软件算法在成像显示屏上进行实时图像显示,从而有效指导工程师的工程操作。
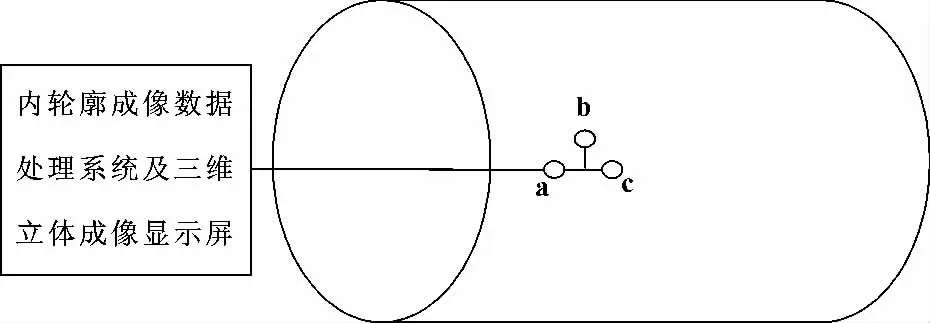
图1 内轮廓成像系统的模型
内轮廓三通道时差法高精度超声波测距系统由一个收发一体电路与两个接收电路共同组成,测距轮廓直径可达到10.4 m,设计测距精度不大于3 mm。时差法超声波高精度测距模型如图2、图3所示,a、b、c 为超声波传感器,b 为收发一体超声测距电路,a、c 为超声测距回波接收电路,超声波传感器的发射接收角度为±55°,在d1≤d2时,能保证传感器b先于a、c 接收到回波信号,进而由时间差Δt1、Δt2推算出传感器b 到障碍物的距离。
(1)当障碍物与超声传感器所在平面垂直时见图2。
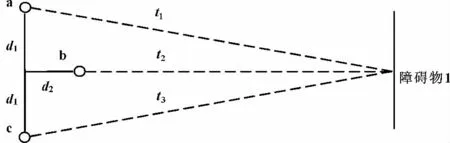
图2 障碍物与超声传感器所在平面垂直结构图
由于a、c 对称,此时t1= t3,从而Δt = t1- t2,通过计算得传感器b 到障碍物1 的距离为

式中:c 为超声波在介质中的传播速度。
(2)当障碍物与传感器平面有一点夹角时,见图3。

图3 障碍物与传感器平面有夹角结构图
由图知此时Δt1=t1-t2、Δt2=t4-t3,通过计算得传感器b 与障碍物之间距离L 为

由此可见,内轮廓超声波成像系统中三通道时差法超声测距系统的设计能有效地解决被测物体内表面不平整对测距系统造成的测距误差,提高了测距的准确性,为后续成像算法提供了实时准确的数据。
2 三通道时差法高精度超声波测距仪的设计
时差法高精度超声波测距仪电路具体设计见图4。

图4 电路设计流程图
2.1 超声波发射部分
超声波发射电路由NE555 组成多谐振荡器产生周期为46 ms、低电平为330 μs 的触发波,在低电平期间触发另一片NE555 产生40 kHz 的超声波,再通过变压器实现激励信号的幅度放大并作用于超声传感器发射超声信号。发射电路与单片机独立,可以周期性地发射超声波。
2.2 超声波模拟接收部分
传感器信号通过由无限增益带通滤波构成的前置放大电路、巴特沃斯二阶高通滤波器、距离增益补偿电路(TGC)、巴特沃斯四阶低通滤波器、双向检波、差动放大、AGC 自动增益补偿电路以及迟滞比较器共同组成。
2.2.1 前置放大模块
如图5所示,前置低噪声放大电路采用三极管放大电路和NE5532 构成的无限增益多路反馈有源带通滤波电路。三极管放大电路能有效地缓解发射超声波拖尾对回波信号的影响,无限增益多路反馈有源带通滤波电路采用反相端输入,失真较小,能有效地去除回波信号中发射波信号的干扰以及盲区对测距的影响。通过第一级中心频率为40.2 kHz、带宽为1.3 kHz、中心频率处增益为1 690 以及第二级中心频率为39.55 kHz、带宽为2.26 kHz、中心频率处增益为319 的带通滤波,有效地去除拖尾并且对回波信号进行适当放大。

图5 前置放大模块
无限增益多路反馈有源带通滤波器具体的各项参数计算公式如下:
中心频率fm为:

fm处的增益:

品质因素:

带宽:

由此看出无限增益多路反馈有源带通滤波电路可以允许对Q、Am和fm进行独立调节,而且带宽和增益因子与R31、R32无关,因此R31、R32可以分别用来调节中心频率而不影响带宽B 和增益Am对于低Q 值情况,方便对中心频率、带宽、品质因素以及增益的调节。另外滤波器可以不用R31、R32而工作,此时Q可通过-Am=2Q2来计算。
无限增益多路反馈有源带通滤波电路的输出信号将经过二阶巴特沃斯高通滤波电路,采用35 kHz 的截止频率,滤除一些低频噪声,防止其进入距离增益补偿电路。
2.2.2 距离补偿电路设计
如图6所示,距离增益补偿电路是采用由美国AD 公司推出的宽频带、低噪声、低畸变、高增益精度的压控VGA 芯片AD603 以及低噪声、输出轨至轨的四运放TL974、四双向模拟开关CD4066 共同组成,其中由TL974 和CD4066 产生幅值随时间变化,斜率、偏置可调的积分曲线。积分曲线的输出与AD603的GPOS 相连,GNEG 端设为参考电压,电路增益范围为40Vg+20 dB,其中Vg为GPOS 与GNEG 端的电压差。CD4066 模拟开关构成的积分电路实现对增益曲线的控制,其控制管脚由NE555 产生周期为46 ms、低电平为330 μs 的触发波通过三极管开关电路得到,从而使积分曲线在45.67 ms 的回波周期内得到积分曲线,在330 μs 的触发超声波周期内实现积分曲线的复位。从而在测距周期内,实现对回波信号的有效距离补偿。

图6 距离增益补偿电路
由于目标物体距离越远,回波信号幅值就越小,因此距离增益补偿使得回波信号在测距周期内随着目标距离增加、回波信号幅值减小而增益变大,这样既能避免近距离回波信号的饱和失真,同时也克服了远距离回波信号幅值偏低对信号差值提取的影响,从而使回波信号在整个时间周期内,幅值保持基本相同,为后续检波整形以及数字逻辑电路部分能够正常工作提供足够强的信号。系统通过幅值随测距周期目标物体距离变化所形成的积分曲线实现了增益随时间、信号强弱的人为控制,继而实现对回波信号的距离增益补偿,可调性强,灵活性大,便于实际生产应用。
距离增益补偿电路(TGC)增益曲线示意图见图7。

图7 距离增益补偿电路(TGC)增益曲线示意图
2.2.3 双向检波模块
由于发射电路发射脉冲的稳定性以及超声一体化传感器的功率稳定性,每次回波的检波信号会有10 μs 左右的误差,这对FPGA 计数器计数会产生很大的误差影响,因此系统采用双向检波,使检波后的包络状波形相互叠加,进而减小系统误差对测试数据的影响, 双向检波后的信号通过增益为2 倍的差动放大器。
2.2.4 AGC 自动增益模块
AGC 自动增益电路,也就是通俗讲的振幅稳定振荡器,通过输出信号的幅值反作用输入增益控制器,输出幅值较小,增益自动变大;输出幅值较高,增益自动减小,从而实现增益对检波信号的自动幅值控制。图8所示最大控制范围为60 dB 的AGC 电路,由VCA810、运算放大器和幅值检测二极管D4 构成,其中C13为保持电容,RB7、R21控制攻击和释放时间,电阻R18和电容C13控制增益阶段反馈循环。每当VO2 输出峰值超过虚拟峰值,运算放大器就会输出摆动,正向偏置二极管和保持电容充电,电压正向驱动电容,降低放大器的增益,从而实现自动增益的控制。RB7和C13决定了这个自动增益的攻击和释放时间。图9 为输入/输出范围与增益示意图。

图8 AGC 自动增益电路

图9 输入/输出范围与增益示意图
2.2.5 超声波接收电路数字部分
经过迟滞比较器后通道1、通道2、通道3 信号经过由74HC4538 构成的边沿提取电路以及数字逻辑电路产生门信号GATE0、GATE1。时序逻辑如图10所示。

图10 时间差信号时序逻辑图
GATE0、GATE1 信号通过FPGA,分别求出Δt1与Δt2,根据公式(1)、(2)求出L。
2.2.6 FPGA 与C8051F340 单片机的数据传输
考虑到计数器的精确度,系统采用FPGA 进行计数,计数时钟采用50M 系统时钟,计数完成后,由FPGA 通过I/O 口,实现FPGA 与C8051F340 的数据通信,把数据实时传输到单片机,并储存到片外RAM 里,为后续上位机算法提供实时数据。
2.2.7 上位机成像算法的研究
在高粉尘、无视觉的被测物体内(如煤矿巷道),通过内轮廓超声波三通道时差法高精度超声波测距系统在巷道内部每一位置进行360°旋转,测得一组数据,然后通过电机推动,系统每前进10 mm停止46 ms 再测得一组数据,并把数据实时传输到上位机,由上位机软件MATLAB 进行分析、计算成像并通过VC 设计用户操作界面,使用户可以在不同角度、不同方位对图像整体以及不同角度的切面进行实时观察。成像模拟示意图如图11所示。
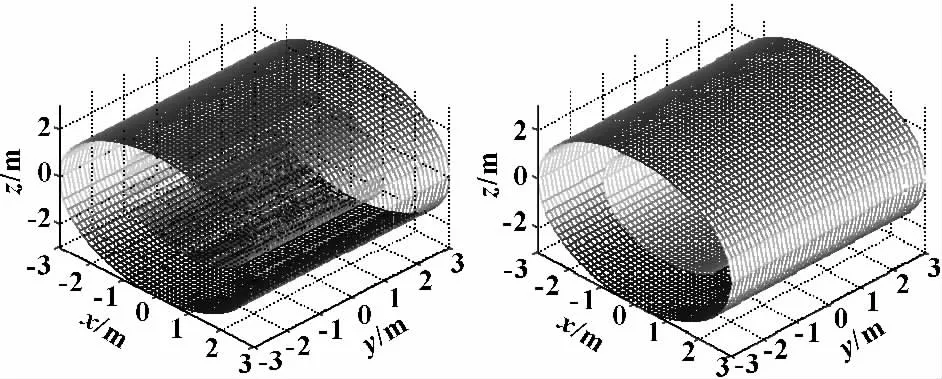
图11 系统成像模拟示意图
3 系统软件设计
系统软件设计流程图如图12所示。

图12 软件设计流程图
4 实验分析
从实验测试可以得出,系统测量精度达到了3 mm,误差值为0.6%,测量范围直径达到10.4 m(d1=4 cm,d2=5 cm 时)。内部轮廓的成像精度取决于系统测距的精度,直接取决于三通道时间差值的提取以及传感器所测距离点数的数量与次数,每个位置测距点数多、次数多可有效提高系统的成像精度。对于精度的进一步提高,有以下两种办法:(1)对传感器工作的环境温度进行实时精确测量,对系统测距精度进行校正;(2)优化控制系统,增加测距次数与点数,进而提高成像精度。
5 结论
内部轮廓三通道超声成像系统主要依据高精度、大量程的三通道时差法测距仪,三通道时差法测距仪采用距离增益补偿、自动增益补偿等硬件电路的形式建立起三通道的时间差值进而反推出被测距离,从而实现高精度、大量程的内部轮廓测距与成像。可以看出:系统测距电路相对简单,成本较低,便于携带,在公路隧道成像、煤矿巷道探测、曲面仿形检测等领域具有广泛应用。
【1】熊春山,彭刚,黄心汉,等.基于超声测距的三维精确定位系统与设计[J].自动化仪表,2001(3):7-10.
【2】胡跃辉,周康源,周平,等.一种实时3D 超声定位系统的设计[J].声学技术,2004(1):29-32.
