超声波在压力容器泄漏检测与定位中的应用
2014-03-18李建民吴立甲
李建民,张 军,吴立甲
(1.威卢克斯(中国)有限公司,河北 廊坊 065001;2.河北工业大学,天津 300130)
0 引言
压力容器是能够承受一定压力的密闭容器的总称,其主要用途是存储及运输有压力的液态和气态物质。但是,据调查,在石化行业中,由于压力容器原因而发生的泄漏,每年都会造成大约20%左右的压缩气体损失。压力容器泄漏而导致的事故频频发生,给社会造成了巨额经济损失,让人们付出了沉痛的生命代价。因此,在石化行业中,压力容器泄漏检测与定位有着重要的现实意义[1]。
通常采用超声波定向,进行泄漏检测与定位,其原理是,通过安装在泄漏检测装置上的接收器接收泄漏源发出的超声波信号。对接收器接收方向进行微调后,调整到最大值方向,此方向即为泄漏源方向[2-3]。经实际测试,使用超声波定向具有较高的报警灵敏度和较高的泄漏定位精度。
1 利用超声波对声源的检测与定位
1.1 基于时延估计的声源定位方法
1.1.1 定位简介
一般来讲,接收目标信号最少需要有3个基元构成的传声器阵列,通过对接收到的超声波信号进行一系列处理,可以依据目标与基元位置间的几何条件关系确定目标信号的位置[4-5],如图1所示(图中实心星形表示声源,黑色实心原点表示传声器基元)。

图1 定位示意图
这种声源定位算法由两部分组成:
(1)估计时延;
(2)估计位置。
声源的位置可根据(1)中得到的时间差和传声器排列的几何位置估算出,估算出的时延是否准确直接影响着最终的定位精度,传声器排列的几何位置会影响到计算的复杂程度。
1.1.2 时延估计的方法
目前,基于时延的广义相关法和自适应法是研究领域备受关注的热点。广义相关法的使用相当普遍,而且广义相关法可以演化成多种方法。自适应法不需要或仅需要较少的噪声的先验知识和有关的输入信号,能够适应环境的变化。
广义相关法通过提前对信号进行预处理,进而改变信噪比,提高时延估计精度。自适应法,则不需要或仅需要较少的信号的先验知识,根据采样自动调整系数,降低输出信号的误差,这种方法的特点是计算简单快速,时延精度高。
1.2 坐标轴空间定位算法
1.2.1 定位算法原理
我们假设声源信号被多个传感器节点接收,传感器节点的坐标用ri(xi,yi,zi)来表示,声源的坐标用rs(x,y,z)来表示,传感器节点i到声源的距离定义为Di,则

定义传感器节点到坐标原点的距离为Ri,声源位置到坐标原点的距离为Rs,传感器节点和节点到声源的距离之差为dij,则

在这种情况下,将任何一个传感器节点的位置定义为坐标原点,即可得到

同时,可以得到

由余弦定理得到

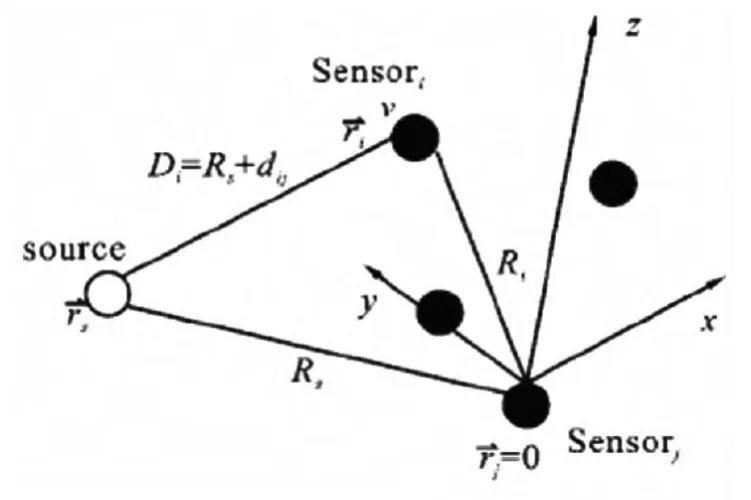
图2 位置原理示意图
假设传感器节点J为空间坐标系的参考原点,计算其他(N-1)个dij,得到(N-1)个形如(6)的式子。
若考虑传感器节点之间的时延计算误差,那么根据定位原理得到的(N-1)个dij也不准确,因此必须引入等式误差。当把j=1的传感器作为参考传感器节点时,式(6)就可以转换为如下形式:

式中,εi为误差,将式(7)转换成矩阵的形式为:
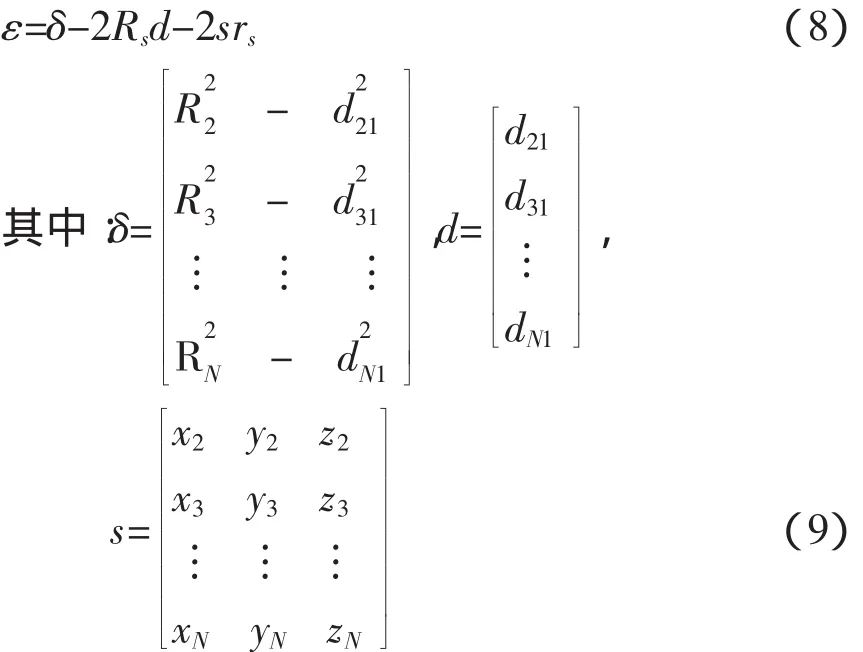
进行求解即可得到声源位置rs(x,y,z)。
1.2.2 阵列方式
传感器阵列方式排列方法有三角形、正方形、长方形等,综合这些排列方式的优缺点,采取空间坐标轴排列方式。空间坐标轴阵列如图3所示,其优势在于只使用4个传感器,有效地减少了信号的处理量。一个传感器作为空间坐标系的原点O,另外三个传感器组成空间坐标系的O—X轴、O—Y轴和O—Z轴,将三个传感器采集的信号与坐标系原点O的信号进行比较。为计算简便,规定1号传感器至2号、3号、4号传感器之间的距离均为L。
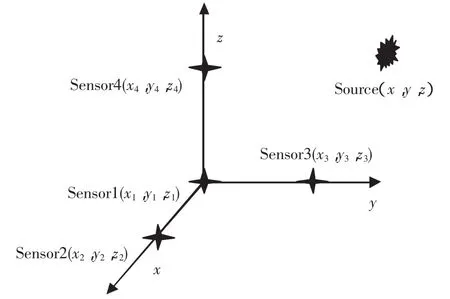
图3 空间坐标轴阵列示意图
1.2.3 定位算法
设周边环境温度为T,超声波的传播速度为v,1号传感器与2号传感器接收到的超声波信号的时间延迟为a,1号传感器与3号传感器接收到的超声波信号的时间延迟为b,1号传感器与4号传感器接收到的信号间的时间差为c。则有:

根据传感器的阵列几何位置关系,根据公式(8)可以得出以下结果:
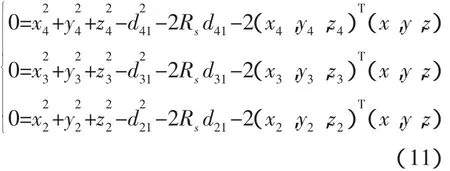
上式中相应的有:

令(x1,y1,z1)=(0,0,0),可得:
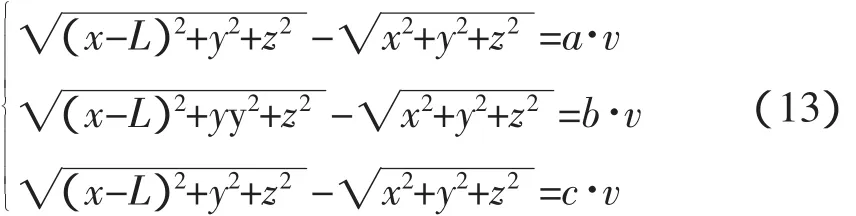
求解上面的方程组就可以得出位置坐标。
2 压力容器泄漏检测与定位系统的硬软件架构
2.1 压力容器泄漏检测与定位系统的硬件架构
压力容器采用温岭巨霸机械公司的XL-01小型压力气罐,通过在四个球阀堵冒上钻直径不同的小孔来模拟压力容器泄露,直径分别为0.5mm,1mm,1.5mm和2mm。实验中,通过改变泄露的压力大小和更换球阀上的堵冒来模拟不同条件下的泄漏。
采用东方集团扬州金通电子有限公司生产的WYK-305B直流稳压电源、北京阿尔泰科技发展有限公司的PCI8025数据采集卡和美国SensComp公司的40LR12超声波传感器,组成一整套泄露定位实验仪器。
2.2 压力容器泄漏检测与定位系统的软件架构
总体的软件架构按照实现的功能可以划分为用于数据采集的数据采集模块,用于数据处理的数据处理模块和根据这两个数据进行定位的数据定位模块,软件采用LabVIEW语言编写,将这三个模块整合为一体,其结构如图5所示。

图4 搭建的实验平台
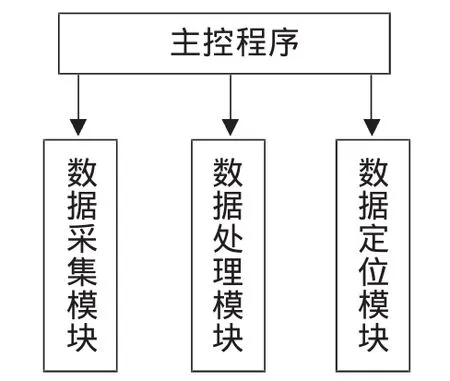
图5 总体软件架构示意图
为了能方便地对三个模块进行切换,将主界面分为数据采集选项卡、数据处理选项卡和位置计算选项卡三个独立部分。每个模块都能独立运行,可将采集到的数据传递给数据处理模块,将处理后的数据传递给位置计算模块,从而得到最终定位结果,软件的主操作界面如图6所示。
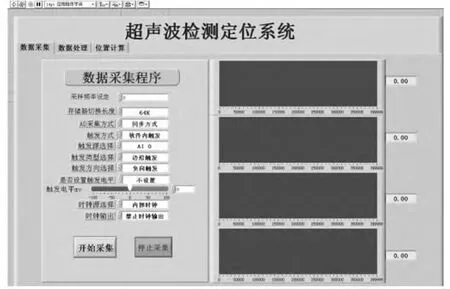
图6 软件主操作界面
3 结论
当采用孔径直径为2mm的球阀时,无论压力数据如何变化,均检测不到超声信号,无法进行泄漏源定位。原因在于采用的小型压力气罐,内部的压力有限,当孔径过大时,产生的超声波频率过小,不足以被检测到。
当采用孔径直径为1.5mm的球阀时,或者当压力罐中压力差大于0.6MPa时,通过传感器都可以检测到超声波信号,对采集到的数据进行处理后可以定位泄漏源。得到的实验数据如表1所示。
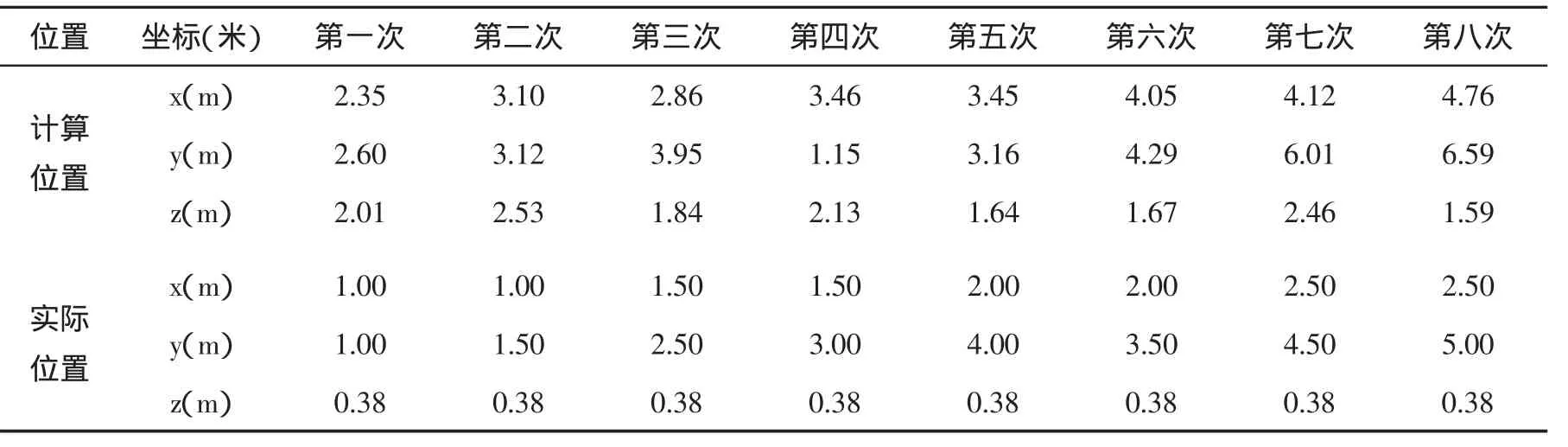
表1 实验数据表Ⅰ
当采用孔径直径为1mm的球阀时,或者当压力罐中压力差小于0.5MPa时,通过传感器都不能检测到超声波信号;当压力罐中压力差大于0.5MPa时,通过传感器都可以检测到超声波信号,处理采集到的数据后可以定位泄漏源。得到的实验数据如表2所示。
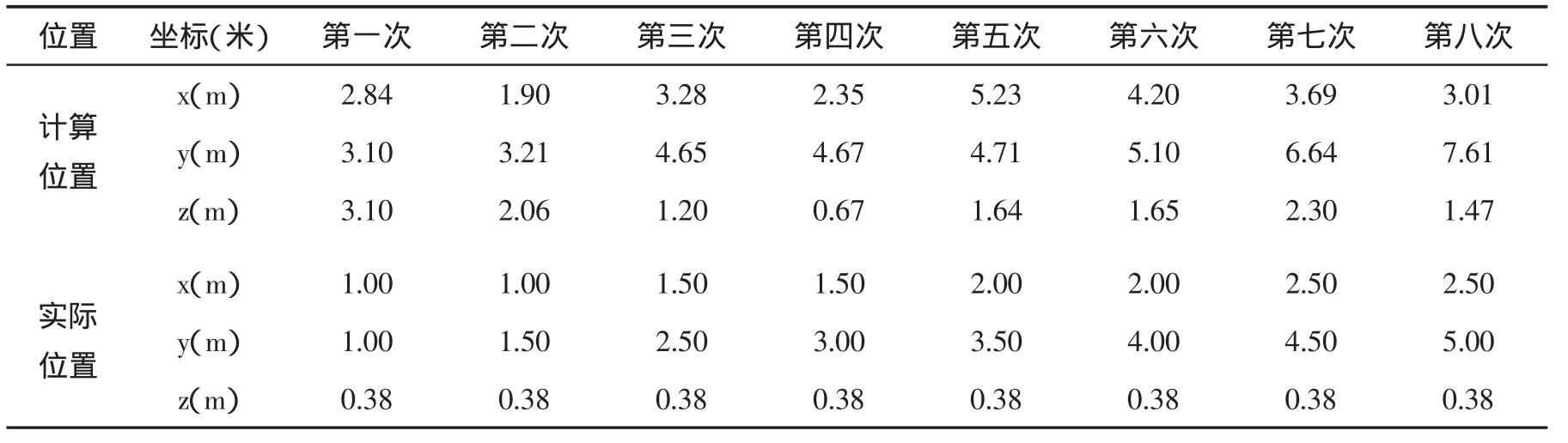
表2 实验数据表Ⅱ
当采用孔径直径为0.5mm的球阀时,或者当压力罐中压力差大于0.4MPa时,通过传感器都可以得到超声波信号,处理采集到的数据后可以定位泄漏源。得到的实验数据如表3所示。
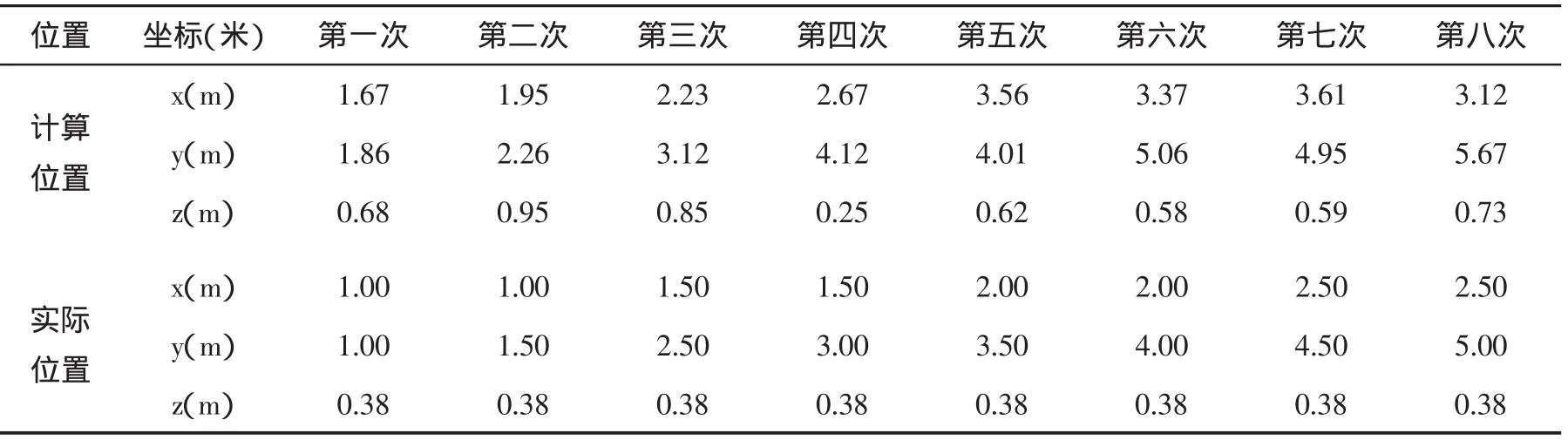
表3 实验数据表Ⅲ
总结以上实验数据可以得出,采用这种空间坐标轴排列方式可以对压力容器泄漏检测进行定位,但是对泄漏点的定位,精度尚有待提高。
[1]吴立甲.基于超声波检测的声源定位研究[D].河北工业大学,2010.
[2]台闯,郑丽群.电场感应技术在储罐腐蚀泄漏检测中的应用[J].油气储运,2009,28(11):60-63.
[3]Hall Stephen,Lyons Jack,Storm StephenK.Real-Time Monitoring System Measures Air In-Leakage[J].Power,2010,154(8):53.
[4]Alan S Bandes.Ultrasound pinpoints compressored air leaks[J].Plant Enginneering,2009(5):29.
[5]王军,冯菁菁.基于超声波检测的小径弯管缺陷识别[J].科技信息,2012(34).
[6]赵仁顺,梁志农.超声波检测钢管管体分层缺陷方法的研究与应用[J].钢管,2012(6).
