水声测距通信一体化技术分析及试验*
2014-03-18胡安平张建春
胡安平,高 锐,张建春
(西安导航技术研究所,西安710068)
1 引 言
水声信号在水下具有衰减小、传输距离远的特性,因此在水下通信及导航定位工程应用中,一般采用水声信号作为信息传输的首选信号。水声通信技术已从早期的模拟水声通信逐步转向水声数字通信[1],在水下用来传输语音、文本、图像及视频信息[2]。水声导航定位技术可以根据基元之间的基线长度,分为长基线、短基线、超短基线定位系统几类,可以用于水下载体导航定位及资源勘探水下定位,长基线和短基线定位是通过测量水声从发射端到接收端的传输时间转换到距离,根据多组距离测量量来解算目标的位置,超短基线定位是通过相位测量和测距相结合进行定位解算[3]。水声通信及水声导航在民用和军事方面均有广泛应用,传统的水声通信设备和水声导航设备是各自独立的设备,但无论水声通信还是水声导航,都是借助于水声信息传输,均受到水声信道随机时-空-频变参、强多径、快起伏和严格带限等特异性影响[4],具有一些共性的特点,有必要开展水声定位与通信的一体化研究。本文从实现水声测距和水声通信一体化的技术体制入手,先采用仿真来分析水声测距通信共用同步头一体化的性能,然后设计水池测试方案来对水声测距通信一体化开展水池测试验证,通过仿真和试验验证了水声测距一体化的可行性及其性能。
2 水声测距通信一体化技术分析
水声通信和水声测距定位均需要在发射端发射水声信号,接收端通过接收水声信号处理实现各自功能。水声通信和水声测距的硬件前端基本相同,信息流程在发射端均需通过信源编码、信号调制、功率驱动、水声换能器发射等过程,在接收端均需要通过水听器信号接收放大、信息解调、信息解码等过程,由于水声通信和水声测距定位有很多共同之处,因此,在一套水声硬件设备上,通过软件处理等方式,可以实现水声测距定位和水声通信的功能一体化。
2.1 水声测距通信一体化技术体制
在一对水声收发装置上要实现水声通信与测距的功能一体化,有3 种实现方式:第一种是以时分工作方式,在不同的时隙上分别发射水声通信调制信号和水声导航测距调制信号,在接收端分别对水声通信信号和水声导航测距信号进行接收处理,这样以时分方式分别进行水声通信和水声测距;第二种是频分工作方式,即发射端的水声通信和水声测距定位信号采用不同的工作频率,这样在接收端通过频率滤波,可以同时处理和解调水声通信和水声测距信息;第三种是将水声通信和水声测距信号通过共用同步头融为一体,在发射端发射经过特殊设计的水声信号,在接收端通过同步解调等信息处理,通过接收一组在同一频率上的水声信号,既完成水声测距,也可以解调得到水声通信数据。这3 种技术体制的优缺点分析比对如表1所示。显然,第三种体制是一种较好的工作方式,因此,本文后面介绍采用第三种方式实现水声测距与通信的一体化。

表1 水声测距通信一体化技术体制比较Table 1 Comparison between underwater acoustic communication integration ranging technology systems
水声测距有同步测距和非同步测距两种:同步测距就是指发射端与接收端的时间同步,通过测量水声信号发射时刻和接收时刻的时间差来得到距离值;非同步测距则是指发射端和接收端的时间不同步,发射端和接收端以应答的方式通过测量水声信号往返时间来得到发射端和接收端的测距,测距是实现导航定位的基础。
2.2 水声测距通信一体化总体设计
水声测距通信一体化总体方案设计采用了软件无线电的设计理念,中央处理硬件电路采用通用小型化、低功耗数字信号处理器板硬件架构,水声通信和测距的信号处理在ADI 公司DSP 和Xilinx 公司FPGA 上用软件完成。为了降低体积和成本,水声信号发送和接收共用一个水声换能器,其工作频率为10~20 kHz,接收灵敏度响应为-190 ±3 dB@15 kHz(re 1 V /μPa @1 m)。水声信息传输采用半双工工作模式,在测距通信一体化工作方式下,信息传输速率可以软件设置为47 b/s、85 b/s、151 b/s,在低速率下可以保障复杂海况下水声测距和通信的联通性及可靠性。
下面介绍水声测距通信一体化处理涉及关键技术。
(1)海洋环境对水声测距通信的影响及应对技术
海洋介质是个非常复杂的声传播信道,受到各种自然条件、地理条件和随机因素的影响,致使水声信道有很大的复杂性和不稳定性,需要解决在复杂海况下的可靠水声通信和测距问题。采用扩频技术应对水声信号低信噪比接收处理,并对水声信号多径情况识别和区分。
(2)水声传播速度实时修正技术
海洋水声传播速度受到温度、盐分等多种因素的影响,使得水声速度随海洋环境特性而发生改变,水声速度参数的精确性将直接影响水声测距的精度。采用分层理论和费马原理,根据收发两端的水声信号传输路径,通过查表的方式来实时修正水声传输速度。
(3)水声自适应信息发送及接收技术
海洋环境的多变性使得水声信息传输的信道会随时间发生变化,曾经可靠建立的水声信息传输条件将会发生变化,不能保证水声信息传输总是可靠联通。通过水声信号收发两端根据水声环境自适应地调整水声信息收发的频率、速率和功率等级,可保证水声信息收发的可靠性。
(4)水声测距通信一体化处理技术
水声测距和水声通信在水声信号的A/D 采样前端采用相同的放大和处理通道,在数字信号处理时,根据数据信号标志来区分是进行测距处理还是通信处理,测距处理需要进行精确的延时估计和时序控制,测距的参数也用来更好地接收解调通信数据。
2.3 水声测距通信共用同步头方式分析
水声测距和水声通信因其实现功能目的不同,因此信号处理的要求也不相同。水声测距主要是测量发射端与接收端之间的水声传播时间乘以水声传播速度实现,因此,在水声传播速度已知的情况下,水声测距主要解决水声信号发射与接收时间差测量的精确性[5]。若要精确测量到达时间,则需要水声测距信号在接收端有精细的时间分辨率。水声通信则需要将发射端的信息解调并提取出来,水声数据通信能有效进行,首先需要进行信号同步,信号同步的性能好坏将直接影响数据是否能正确接收,水声信号同步将随着数据通信的速率提高,信号同步的时间精度也要提高。因此,采用有较高精度时间分辨率的水声通信同步头信号,可以用来在一组水声通信信号内同时实现测距定位与通信功能。
早期的水声定位系统中,大多使用模拟电子电路和简单的窄带连续波信号脉冲,但这种猝发纯音信号受限于一些特定的工作通道,由于水声环境的复杂性[6],使得水声信号在接收端的时间分辨率下降,并且也不适合用来进行水声通信,因此,窄带信号不适合用于水声测距通信一体化中作为信号同步方式。
水声通信以及定位系统已向宽度、数字化方向发展[7],水声测距通过发射一个收发双方约定的宽带脉冲,接收端通过互相关等手段估计出时延,进而解算出收发两端的距离。水声通信系统为了正确地截取码元,也需要采用宽带脉冲作为同步头以提高同步精度。因此测距和通信都要求发射一个宽带脉冲,这就可以共用通信同步头作为测距的发射脉冲。
常用的同步头波形有线性调频、双曲调频、伪随机扩频等形式,它们在多普勒容限、时延估计精度等方面表现出不同的性能。假设信号频带为0.01~4.01 kHz、脉冲宽度为500 ms,下面通过仿真来分析各种同步头的性能。线性调频信号、双曲调频信号和伪随机扩频信号的模糊度图如图1所示。
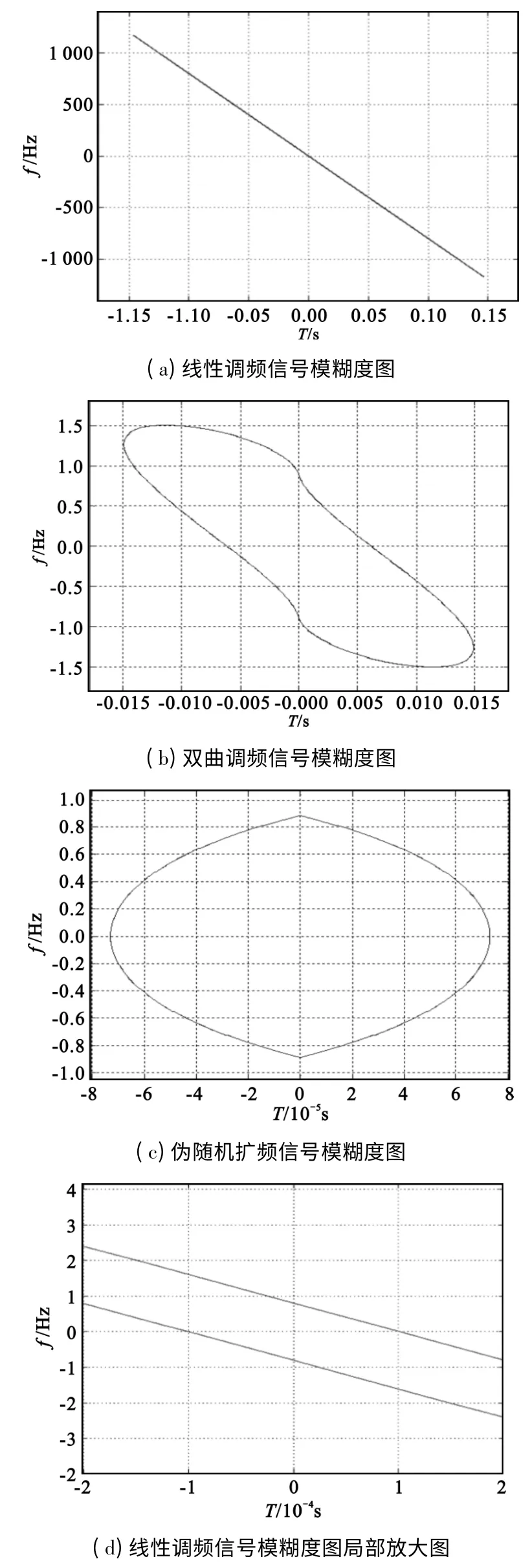
图1 线性调频、双曲线调频及伪随机扩频信号模糊度图Fig.1 Ambiguity diagrams of linear FM hyperbolic FM and pseudo-random spreading signal
由图1可见,对于不同类型的同步头,其多普勒容限和时延估计精度是有差异的,其中线性调频信号的时延分辨力和频移分辨力大约分别为0.1 ms和0.8 Hz,双曲调频信号的时延分辨力和频移分辨力大约分别为6 ms和0.88 Hz,伪随机扩频的时延分辨力和频移分辨力大约分别为0.07 ms和0.9 Hz。
由仿真结果可以看出,线性调频信号的频移分辨力是最好的,而伪随机扩频的时延分辨力是最佳的。如果想要兼顾时延分辨力和频移分辨力,可以考虑将线性调频信号和伪随机扩频信号进行组合,一个用来测时延,一个用来测频移。若是发射端和接收端以很慢速度相对运动,则可以只用伪随机扩频的同步头方式。
3 水声测距通信一体化测距误差及误码率仿真分析
采用共用宽带同步头方式实现水声测距通信一体化,根据设置参数不同,将会对测距定位和通信产生不同的影响,对测距需要考虑测量精度,而对于通信则分析误码率。下面采用仿真的办法[8],分别对测距精度和误码率进行分析。
3.1 水声测距误差分析
在进行水声测距通信一体化共用同步头测距误差分析时,分别采用线性调频、双曲线调频、伪随机扩频3 种不同的同步头方式进行仿真分析。
(1)信噪比对水声测距精度影响分析
考虑到通信可靠解调需要较好的信噪比,因此,将水声测距通信一体化的同步头检测和测距的工作信噪比设置在-15~20 dB之间。当接收到水声信号信噪比较低、无法完成正确解调时,可以通过同步头检测和距离估计判断声源点的位置(结合接收阵列的定向),引导接收平台向声源靠近,以实现可靠通信信号接收并得到导航电文信息。例如,可靠水声通信距离为5 km时,如果同步头检测所需信噪比相比通信可靠解调信噪比低12 dB,则在20 km处就可对声源进行测距。
水声信号在不同信噪比下的测距误差仿真时,选用的水声信号带宽4 kHz、脉冲宽度200 ms,接收端的模拟信号采样频率为32 kHz,在基带情况下进行仿真。先不考虑多普勒频移和多径的问题,不同波形的同步头测距误差统计在不同信噪比下的结果见图2(a)。显然,信噪比越大,测距精度越高,3 种波形中伪随机扩频信号受信噪比的影响最小。由于相关处理的增益较高,因此在信噪比大于-10 dB时,这3 种同步头的测距误差都较小,测距误差主要受限于采样频率。
(2)平台运动多普勒对水声测距精度影响分析
在水声通信中,特别是与运动对象进行通信的过程中,由于发射与接收平台之间存在相对运动,另外,水介质的不均匀性和水中暗流等,多普勒效应是不可避免的。多普勒效应会导致信号的频率扩展、时间选择性衰落、频率偏移等畸变,但其最直接的影响表现为信号的伸缩,即改变了信号在时间域的长度,信号的伸缩将给信息同步解调造成压力,使整个水声信息传输系统的性能不断下降,因此,多普勒的影响不容忽视。对于不同的同步头,多普勒频移分辨力和多普勒容限是不同的,下面通过仿真来分析不同同步头在多普勒方面对水声测距精度的影响。
在仿真中,同样选用信号带宽为4 kHz,脉冲宽度为200 ms,信噪比为5 dB。不同波形的同步头测距误差统计结果如图2(b)所示,可见多普勒对测距精度影响较大,其中多普勒频移对线性调频信号的影响最小。为减小多普勒对测距精度的影响,可考虑多种信号组合的方式,比如先用线性调频信号进行粗同步,然后再用伪随机扩频信号进行细同步。
(3)信道多径对水声测距精度影响分析
在水声信道中,多径的存在是水声信号在传播过程中产生严重畸变的一个原因。例如,在声源发射一个脉冲,由于多径效应,在接收端将收到一串畸变了的脉冲,对于水声测距通信共用同步头的情况,也受到水声多径的影响。下面通过仿真,分析不同同步头在多径情况下对水声测距精度的影响。
在仿真中,假设多径时延分别为0 s、0.006 83 s、0.012 75 s、0.016 41 s、0.026 083 s 和0.031 167 s,相应的归一化幅值分别为1、0.627 36、0.604 36、0.486 34、0.279 74 和0.264 22。仿真中同样选用信号带宽为4 kHz,脉冲宽度为200 ms,信噪比为5 dB。仿真结果如图2(c)所示,由仿真结果可知,多径条数越多,对测距精度影响越大,相比较而言,多径对双曲调频信号的影响最小。为了降低多径对测距精度的影响,可考虑使用时间反转处理方法[9],来提升多径环境下的测距精度。

图2 水声测距精度仿真分析Fig.2 Simulation analysis of underwater acoustic ranging accuracy
3.2 水声通信误码率分析
在水声测距通信一体化应用中,考虑同步头和数据传输均采用伪随机扩频的情况下,对直接序列扩频(DSSS)调制不同的扩频码长度下的通信误码率进行仿真分析[10]。
图3为在加性高斯白噪声(AWGN)信道下,采用直接序列扩频调制时的误码率仿真结果。仿真条件为:100 个码元,码片长度0.000 25 s,带宽4 kHz(4~8 kHz),采样频率32 kHz,分别采用长度为255、511 和1 023的扩频码调制,对应数据传输率分别为15.686 b/s、7.828 b/s和3.91 b/s,信噪比范围为[-30 dB,10 dB]。从仿真结果可以看出,对应各种调制方式,分别在信噪比大于-24 dB、-20 dB和-17 dB时,误码率降为零。伪随机扩频调制扩频码越长,就可以在更低的信噪比下工作,但信息传输速率也就越慢。仿真结果只考虑了白噪声情况,未考虑多径及其他干扰情况。

图3 AWGN 信道DSSS 调制误码率曲线Fig.3 AWGN channel DSSS modulation error rate curve
4 水声测距通信一体化水池测试试验
为了验证水声测距与通信一体化的性能,这里以中科院声学所的uaelm 水声通信modem 为基础,采用9 阶的m 序列码进行伪随机扩频,在进行通信的同时进行测距。水声测距通信一体化试验采用的载频为12 kHz,数据通信速率47 b/s,所采用的m 序列码的码片宽度为0.5 ms,因此相关函数具有的时间分辨率为0.5 ms,对应的测距精度约为0.75 m。由于在水池中进行的是固定点测试,因此没有考虑多普勒效应。
图4是水声测距通信一体化测试的设备组成及连接示意图,采用单向通信测距的模式进行水池测试。图4中,水声发射控制装置将所要发送的串行通信数据发送给水声发射modem,并发送触发脉冲来启动水声modem 发送水声测距通信信息,发射端的触发脉冲也送给时间间隔测量装置安捷伦53131A 计数器的开门输入端,当水声接收modem接收到水声测距通信信息后,首先进行同步处理,并在获得同步的时刻,输出接收触发脉冲到安捷伦53131A 计数器的关门输入端,随后将解调解码后的通信接收数据通过串口输出到计算机的串口。通过测量53131A 计数器的开门脉冲信号和关门脉冲信号之间的时间长度,减掉水声modem 的固定处理时间(时间处理精度为微秒量级),就可以得到水声测距通信一体化的水声发射到接收之间的传输时间,由于53131A 计数器的时间间隔测量精度达到1 ns,因此,可以精确测量水声信号发射和接收之间的传输时间。

图4 水声测距通信一体化水池测试连接示意图Fig.4 Connection diagram of underwater acoustic ranging and communication integration pool test
在水池试验中,水声modem 和水声换能器之间采用馈线连接,通过调整水声发射换能器和接收换能器的相对位置,可以获得不同收发距离下的水声测距通信一体化测量数据。通过比较水声modem发射端和接收端的发射接收数据,可以获得通信误码率。
在水池试验时,将发射水声换能器位置固定,位于水下1 m,水声接收换能器的位置分别位于第1 点(距发射点3.6 m)、第2 点(距发射点5.7 m)、第3点(距发射点6.4 m)、第4 点(距发射点8.6 m)水下1 m和水下3 m进行40 组以上的水声测距通信一体化测试,在通信数据量约为15 kB下通信误码率为0。水声换能器接收点与水声换能器发射点的距离可以用测量尺测量作为准确值,每个由计数器测量的水声传播时间乘以水声速度(按照1 500 m/s计算)得到水声测距值,每个测量点上测定的距离与准确值相比较的测距误差统计如图5所示,可以得到测距误差小于1 m(95%)。

图5 水声测距通信一体化水池试验测距误差结果Fig.5 Ranging error in underwater acoustic ranging and communication integration pool test
经过水池试验测试,验证了采用9 阶的m 序列码进行通信测距一体化信息传输,时间测量分辨率可以达到预计的0.5 ms精度,在较低通信速率下有良好的通信误码性能,若能采用修正后的水声传播速度进行测距计算,则测距误差可以进一步减小。
5 结束语
本文通过理论分析、仿真分析以及水池试验测试说明了水声测距通信一体化技术的可行性,并验证了水声测距通信一体化的性能。后面还将在湖上或海上进行远距离动态测试,进一步测试在外场情况下的水声测距通信一体化性能。
我们所开展的水声测距通信一体化研究中,在满足测距精度的情况下,信息传输的速率仍有待提高,尚未实现水声通信测距的又快又准。本文相比已发表的水声通信和水声导航论文,侧重点在于研究水声通信测距的一体化。另外,在满足多变海洋环境下的实际工作性能还有待于进一步验证,水声测距和通信的作用距离仍然较近,这些都有待今后进一步深入研究。
通过水声测距通信一体化,可以借助于测距信息优化基于水声信道特性的水声信号处理,提升水下通信的性能。通过水声测距通信一体化技术的研究,有助于研制集制导、导航、通信、控制等多种功能于一体的水下水声设备,提升水下载体所携带水声设备小型化和低功耗性能,在未来的水下军事和民用中有广泛的应用前景。
[1] 马雯,黄建国,张群飞.用MFSK 调制实现水声远程信息传输[J].电讯技术,2004,44(5):80-83.MA Wen,HUANG Jian-guo,ZHANG Qun-fei .Longrang Underwater Acoustic Information Transmission through MFSK Modulation[J].Telecommunication Engineering,2004,44(5):80-83.(in Chinese)
[2] 刘翠海,王文清. 外军潜艇通信关键技术及发展趋势[J].电讯技术,2011,51(7):187-192.LIU Cui- hai,WANG Wen- qing. Key Technology and Developing Trend of Foreign Navies Submarine Communications[J]. Telecommunication Engineering,2011,51(7):187-192. (in Chinese)
[3] 田坦.水下定位与导航技术[M].北京:国防工业出版社,2007.TIAN Tan. Underwater Position and Navigation Technology[M].Beijing:Defense Industry Press,2007. (in Chinese)
[4] 许天增,许鹭芬. 水声数字通信[M]. 北京:海洋出版社,2010.XU Tian-zeng,XU Lu-feng.Digital Acoustic Communication[M].Beijing:Ocean Press,2010. (in Chinese)
[5] 梁波,李斌,邓国兴.中程水下测距及遥控系统主控机设计[J].计算机测量与控制,2009,17(7):1292-1294.LIANG Bo,LI Bin,DENG Guo- xing. Design of Master Unit of Medium Range Underwater Telemeter and Telecontrol System[J]. Computer Measurement & Control,2009,17(7):1292-1294. (in Chinese)
[6] 刘伯胜,雷家煜. 水声学原理[M]. 哈尔滨:哈尔滨工程大学出版社,2009.LIU Bo-sheng,LEI Jia-yu. Acoustic Subject Principle[M]. Harbin:Harbin Engineering University Press,2009. (in Chinese)
[7] 孙小放.Sonardyne 的宽带定位技术[J].水雷战与舰船防护,2009,17(4):74-76.SUN Xiao-fang. Sonardyne Wideband Positioning Technology[J]. Mine Warfare & Ship- Defense ,2009,17(4):74-76.(in Chinese)
[8] 范影乐,杨胜天,李轶,等. MATLAB 仿真应用详解[M].北京:人民邮电出版社,2001.FANG Ying-le,YANG Shen-Tian,LI Yi,et al. MATLAB Detailed Simulation Applications[M].Beijing:People's Posts and Telecom Press,2001. (in Chinese)
[9] 郝明,熊兴中,邱玲.一种基于时间反转的无线定位方法[J]. 四川理工学院学报(自然科学版),2012,25(6):22-26.HAO Ming,XIONG Xing- zhong,QIU Ling. A Wireless Positioning Method Based on Time-reversal[J].Journal of Sichuan University of Science & Engineering (Natural Science Edition),2012,25(6):22-26. (in Chinese)
[10] Han Jeong-woo,Kim Se-young.A Study on the Underwater Acoustic Communication with Direct Sequence Spread Spectrum[C]//Proceedings of 2010 IEEE/IFIP International Conference on Embedded and Ubiquitous Computing.Hong Kong:IEEE,2010:337-340.