EEMD生命探测雷达人体数量识别技术*
2014-03-16蒋留兵韦洪浪许腾飞杨昌昱管四海
蒋留兵,韦洪浪,许腾飞,杨昌昱,管四海
(桂林电子科技大学 信息与通信学院,广西 桂林 541004)
生命探测雷达是指探测生命体的雷达,其融合了雷达技术和生物工程技术,可以穿透非金属介质(砖墙、废墟等),非接触、远距离地检测人体的呼吸和心跳等信息,广泛应用于特殊病人监护、震后救援、反恐斗争等领域[1]。目前国际上比较流行的生命探测技术有光学生命探测技术、音频生命探测技术、红外生命探测技术和雷达生命探测技术等[2]。本文讨论的是超宽带雷达生命探测技术,它基于多普勒效应,通过发射电磁波穿透障碍物照射到人体目标,然后产生电磁波反射,反射的雷达回波信号包含大量的杂波和噪声,同时携带微弱的人体生命信息,最后通过信号处理技术把回波信号中的杂波和噪声去除,提取有用的人体生命信息。
近年来国内外的许多学者致力于生命探测雷达的识别技术研究,并取得了很多研究成果。参考文献[3]采用短时傅里叶变换对生命体的呼吸信号进行变换,并通过奇异值分解有效地提取特征矢量进行模式识别,能够成功地识别人体和动物。但是在穿墙探测情况下,由于信噪比(SNR)比较低,难以提取相应的特征向量,导致识别率很低。参考文献[4]对回波信号进行谱图变换,然后对变换后的矩阵进行奇异值提取,以建立模式特征量,最后采用最小分类器对待识别进行类型分类。该方法能有效识别无人或有一个人,但在多人条件下,效果不佳。参考文献[5]利用EMD方法对回波信号进行分解,然后计算特征向量的奇异熵,最后根据马氏距离对人体数目进行分类。但是EMD方法存在模态混叠问题,从而造成信号时频分布的偏移,使得分解得到的IMF分量的物理意义不明确,因而导致识别效果不佳。针对此问题,Wu Zhaohua和HUANG N E等人提出了一种叫做总体平均经验模态分解(EEMD)方法,经过该方法处理后的信号能够自适应地分解为若干个平稳的本征模态函数(IMF)[6]。
基于此,本文提出了基于EEMD与支持向量机(SVM)相结合的生命探测雷达人体数目识别方法。通过对雷达回波信号进行EEMD分解,提取本征模态函数(IMF)分量构成的矩阵,并对该矩阵进行奇异值分解,求出特征向量,将该特征向量输入支持向量机的分类器对人体数目进行自动识别。理论分析和实验结果表明,该方法可以有效判断生命探测雷达回波信号中人体的数目,相较于短时傅里叶变换与奇异值分解方法、谱图变换与奇异值分解方法、EMD方法与奇异熵方法,该方法具有识别速度快、识别率高等优点。
1 经验模态分解
1.1 经验模态分解(EMD)方法
经验模态分解(EMD)能够根据信号自身的特点自适应分解为一系列的固有模态函数IMF和余项序列,每一个IMF体现信号中不同频率尺度的振荡特性,从而可以对信号进行时域或频域分析[7]。EMD分解的过程是一种筛分过程,即通过层层筛分获得IMF。EMD分解的具体步骤如下:
(1)使用3次样条插值拟合对信号x(t)的极大值点和极小值点进行拟合,得到信号的上包络线eu(t)和下包络线ed(t),然后计算上下包络的均值:

(2)将信号x(t)减去平均包络m1(t),得到一个去掉低频的新序列h1(t),即:

重复步骤(1)和(2),直到满足判断条件:

其中,SD表示连续两次迭代结果的标准差,取值区间为[0.2,0.3]。得到第一个 IMF分量 IMF1(t)=h1k(t),k表示判定条件时的迭代次数。
(3)将IMF1(t)从x(t)中分离出来,得到去掉高频成分的余项序列 r1(t),即 r1(t)=x(t)-IMF1(t)。
(4)将余项序列 r1(t)作为待分解信号,重复以上步骤直到满足筛分约束条件。此时,信号被分解为有限个IMF分量(IMF1(t),IMF2(t),…,IMFn(t))和一个代表原始信号序列均值或趋势的余项rn(t)。因此,原始信号可以表示为:

1.2 总体平均经验模态分解(EEMD)方法
为了解决EMD分解存在的模态混叠问题,在EMD方法的基础上改进形成了EEMD方法。该方法通过利用高斯白噪声频率均匀分布的统计特性,在信号中加入白噪声,使信号在不同尺度上具有连续性,从而减小模态混叠的程度[6]。EEMD的分解步骤如下:
(1)将高斯白噪声ni(t)加入待分解的信号x(t)中,即:

式中,xi(t)表示第i次加入白噪声后的信号;ni(t)表示白噪声信号,其幅值均值为0,标准差为常数。
(2)对加入白噪声后的信号xi(t)分别进行EMD分解,得到所有的IMF分量。
(3)重复步骤(1)和步骤(2)各 N次。
(4)将上述N次EMD分解得到的对应IMF分量进行总体平均运算,可以得到EEMD分解后新的IMF分量为:

此时EEMD分解的最终结果可以表示为:

式中,rn(t)为余项序列。信号经过EEMD分解后,阶数小的一般为高频部分,阶数大的一般为低频部分,而且每个IMF分量不仅包含的频率成分不相同,而且所携带的能量也不同,并且二者都会随着原始信号x(t)的不同而变化。
接收到的雷达回波数据成分复杂,要经过去除直达波、去除背景等一系列预处理,提取慢时间数据切片才能得到一维的回波数据。图1给出1个人时的雷达回波信号时域波形,从图中可以看出雷达回波信号含有比较多的噪声,需要进行后续信号处理才能提取信号的特征。
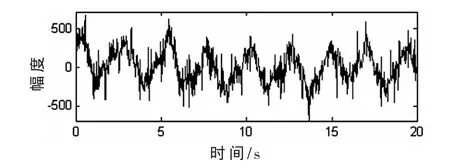
图1 1个人时的雷达回波信号
图2给出以上信号经过EEMD分解后的结果,可以看出信号被自适应地分解为一系列的固有模态函数IMF,每一个IMF体现信号中不同频率尺度的振荡特性,而且阶数越小IMF的频率越高,阶数越大IMF的频率越低,这体现了EEMD分解多分辨率的特性。从图2中也可以看出IMF5信号的幅度最大,这说明大部分的多普勒能量集中在这里,因此该分量也是人体特征最明显的。
2 奇异值分解
特征提取是雷达回波信号人体数量识别的关键问题。由于矩阵的奇异值是矩阵的固有特征,它具有较好的稳定性和鲁棒性,符合模式识别中作为特征向量所要求具有的性质,因此选择奇异值作为模式识别过程中的特征向量[8]。对于任意实矩阵,都可以利用奇异值分解将其转化为对角阵。设有N行、M列的实矩阵A,对它可以作如下的奇异值分解:
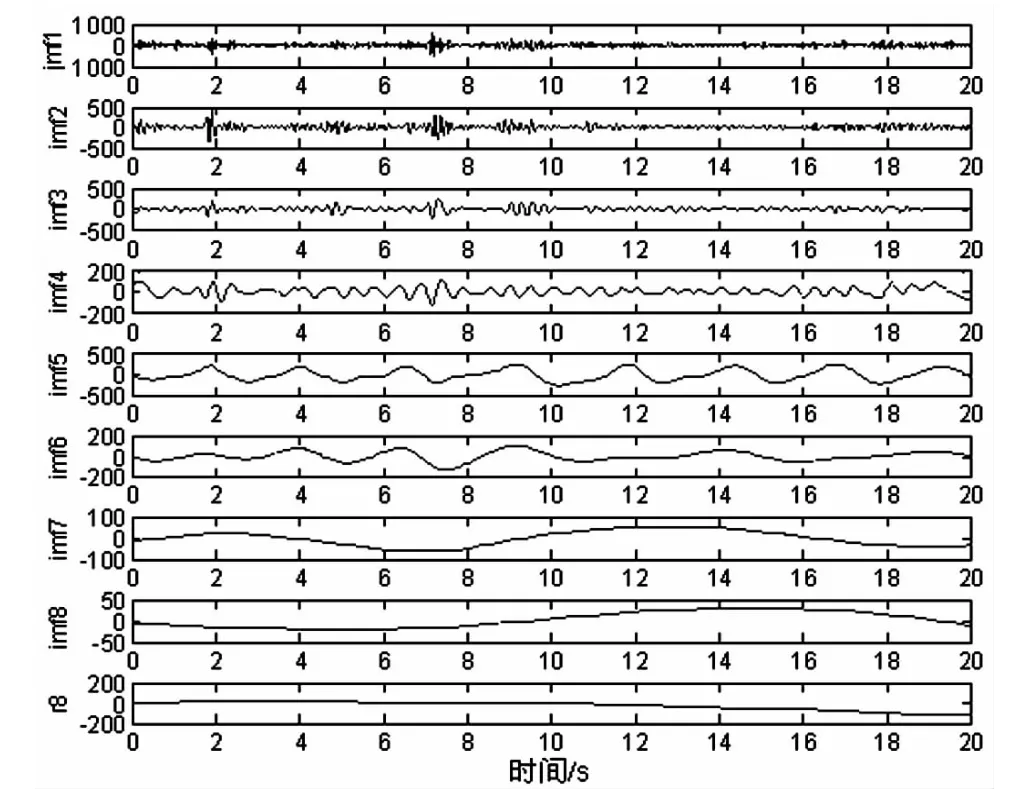
图2 1个人时雷达回波信号的EEMD分解

式中,U=[u1,u2, …,uN]∈RN×N,UTU=I;y=[v1,v2, …,vM]∈RM×M,VTV=I;Λ∈RN×M为矩阵[diag{σ1,σ2,…,σp}:0],其中p=min(N,M),σ1≥σ2≥…≥σp≥0,σ1,σ2,…,σp即 称 为 矩阵A的奇异值。
对 A 进行奇异值分解得到奇异值 σ1,σ2,…,σn,构造特征奇异值向量 T={σ1,σ2,…,σn}。 然后对每个分量进行归一化处理,得:

3 支持向量机原理
支持向量机分类方法是根据结构风险最小化原则构造的机器学习方法,能够解决小样本、非线性及高维的模式识别问题,因而可以用于生命探测雷达回波信号的识别。支持向量机分类的主要思想是寻找一个最优化的超平面作为决策面,它不但能够将所有训练样本正确分类,而且可使训练样本中超平面两侧的距离达到最大[9]。当训练样本为非线性时,可以通过非线性函数φ(x)将样本x映射到一个高维线性空间,然后在这个高维空间中构造最优分类超平面,使原本非线性不可分的样本变为线性可分。当用一个超平面不能把两类完全分开时,需要引入松弛变量ξi(ξi≥0,i=1,2,3…,n)使超平面 ωφ(x)+b=0满足:

式中,n为样本数量;ξi≥0为实际引入的松弛变量。为此,引入以下目标函数:

式中,C是一个正常数,称为惩罚因子。考虑到分类器的泛化能力和分类准确率,引入拉格朗日函数得到优化问题的对偶形式:
式中,K(xi,xj)=φ(xi)·φ(xj),求解式(12)得 αi,进而得 到最优分类函数为:

本文所研究的穿墙雷达人体数量识别方法是一类对余类的多类分类机。分类过程如下:
(1)对于给定分类训练集:

式 中,xi∈Rn,yi∈{1,2,…,M},i=1,2,…,l。
(2)对种类 j=1,2,…,M,把第 j类当做正类,把剩下的M-1类看作负类,用两类支持向量机求决策函数:

(3)根据 g1(x),g2(x),…,gM(x)最大者的上标,判断输入x属于第j类。
4 人体数量识别方法
利用本文介绍的方法对生命探测雷达回波信号分类的具体步骤如下:
(1)对生命探测雷达回波信号进行 EEMD分解,得到一组 IMF分量 IMF1,IMF2,…,IMFn,各 IMF重排形成初始特征向量矩阵A=[IMF1,IMF2,…,IMFn]T;
(2)对矩阵A进行奇异值分解得到奇异值 σ1,σ2,…,σn,构造特征奇异值向量 T=[σ1,σ2,…,σn]。 归一化后,得T=[E1,E2,…,En]。
(3)建立由4个支持向量机组成的人体数量分类器(SVM1,SVM2,SVM3,SVM4)。将特征向量 T′输入支持向量机,对支持向量机进行训练。
(4)对待识别的生命探测雷达回波信号,按照步骤(1)和(2)计算得特征奇异值向量 T′,将其输入分类器,根据分类器的输出确定人体的数量。
5 实验结果分析
生命探测雷达的实验设备为美国劳雷工业有限公司的探地雷达系统SIR-20,它采用了新一代GPR数据采集系统,集成强大的数据采集单元和基于RADAN NT快速数据处理软件,广泛用于公路探测、地质探测等。
实验场景:雷达天线距离墙40 cm,墙体厚度 25 cm,人体站在墙体后面距离墙体1.5 m处。分别对无人、1人、2人、3人的情况进行多次采集数据。雷达参数如下:天线的中心频率为1 GHz,测程 15 ns,采用点数 1 024点,数据位数为16 bit,扫描行数为 64,重复频率为100 kHz。
分别采集无人、1人、2人、3人的穿墙探测实验数据各100组,从实验数据中分别对每一类数据随机抽取70组作为分类器的训练样本,剩下的数据作为测试样本。表1给出4类实验数据典型的特征向量 T′。
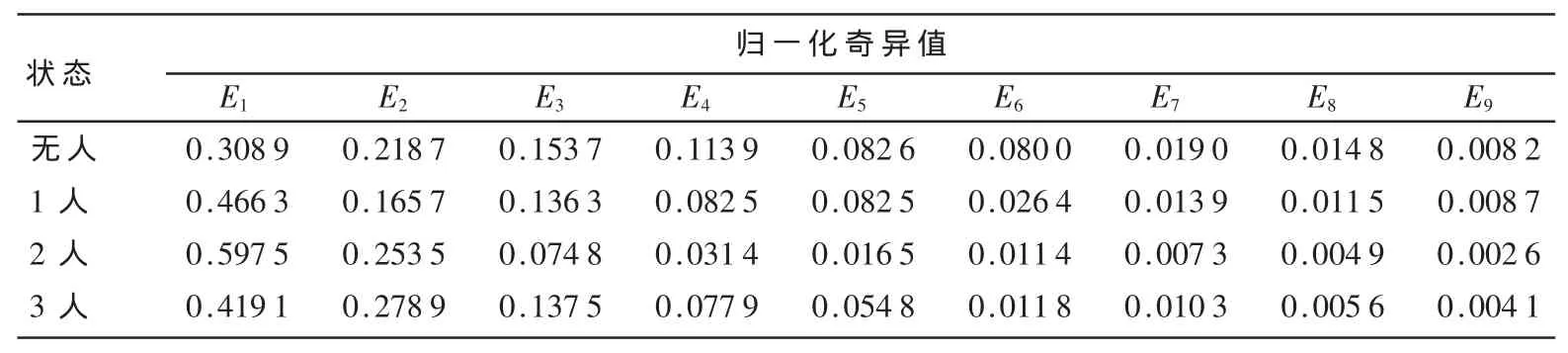
表1 4类数据典型的归一奇异值
将所有训练样本的特征向量输入支持向量机的分类器中进行训练,然后将待测数据的特征向量输入分类器中进行模式识别,识别结果表2所示。从表2可以看出,基于EEMD奇异值向量和支持向量机的方法在生命探测雷达多人识别方面有很好的效果。对于无人和1个人的情况,由于雷达回波信号比较简单,识别率是100%;但是对于多人的情况,由于不同人的呼吸和心跳频率一般是不同的,雷达回波信号所含有的频率成分比较复杂,所以识别率有所下降。
为了验证本文算法的优越性,分别使用几种常用算法对4类实验数据进行识别,识别结果如表3所示。
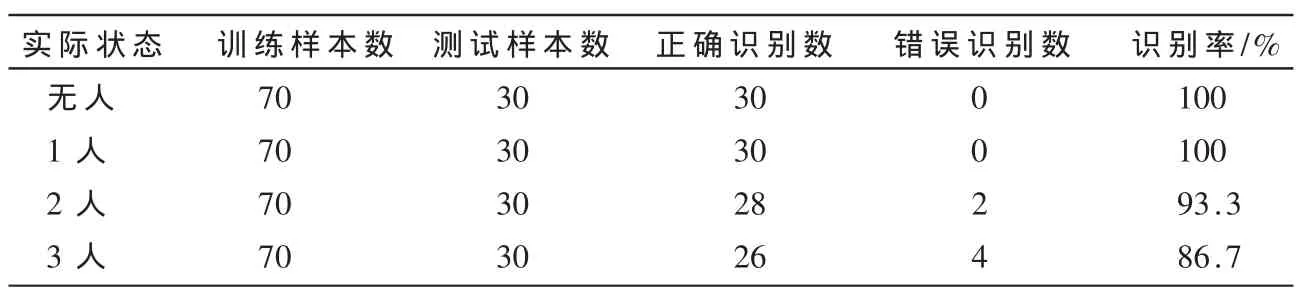
表2 本文算法对雷达回波数据的识别结果
从表3可以看出,基于EEMD奇异值向量和支持向量机的方法克服了短时傅里叶变换与奇异值分解方法和谱图变换与奇异值分解方法对两个人以上无法识别的缺点,同时克服了使用EMD方法与奇异熵方法时由于EMD分解产生的频谱混叠而导致识别率不高的缺点。
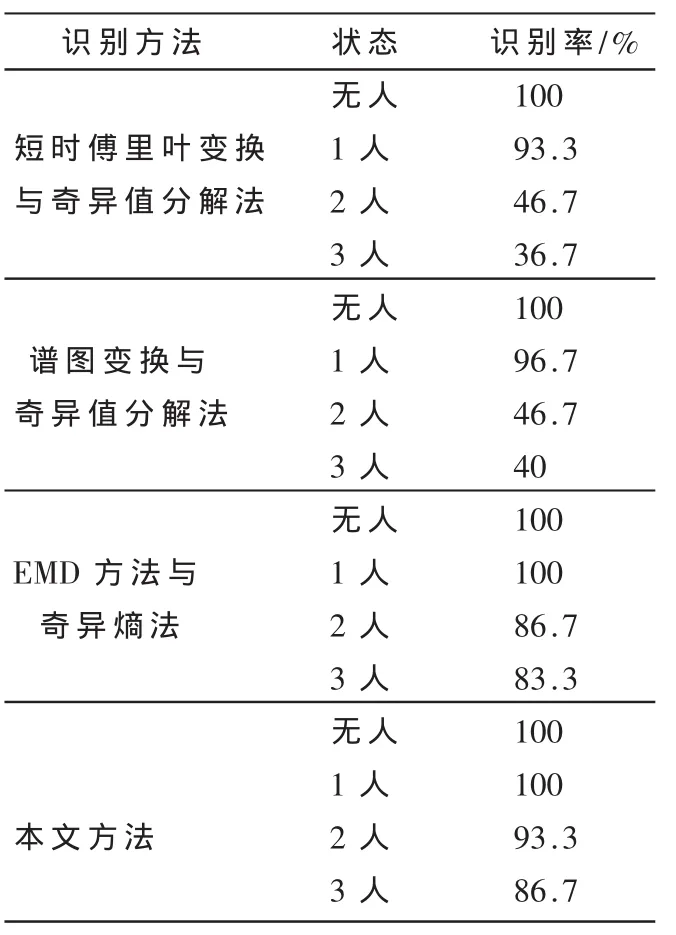
表3 本文算法与几种常用算法对比
EEMD方法可以将信号的时间尺度进行自适应分解,并且克服了EMD分解存在模态混叠的问题,该方法可以将雷达回波信号分解到不同的基本模态中。利用奇异值分解,对EEMD分解后的IMF分量进行特征提取,然后输入支持向量机的分量器进行分类。实验验证了基于EEMD奇异值分解和支持向量机方法在生命探测雷达多人识别中的有效性。但本文只考虑了人体静止的情况,所以当人体在墙后运动时还需寻求更有效的方法进行识别。
[1]Li Changzhi,CUMMINGS J,LAM J,et al.Radar remote monitoring of vital signs[J].IEEE Microwave Magazine,2009,10(1):47-56.
[2]陈纯锴.基于DSP技术的非接触生命信号探测系统关键技术研究[J].电子技术应用,2009,35(12):50-52.
[3]路国华,杨国胜,王健琪,等.雷达式生命探测仪中人体数量识别技术的研究[J].北京生物医学工程,2005,24(1):29-32.
[4]朱卫娟.生命探测雷达回波信号的处理方法研究[D].青岛:青岛科技大学,2011.
[5]白玉刚,杨明.基于 EMD和奇异值分解的搜救目标判[J].火力与指挥控制,2013,38(3):124-129.
[6]Wu Zhaohua,HUANG N E.Ensemble empirical mode decomposition:a noise assisted data analysis method[J].Advances in Adaptive Data Analysis,2008,1(1):1-41.
[7]Wang Jun,Zhang Shouhong,Liu Hongwei.Integral detector using stepped frequency signals[J].Xi′an Dianzi Keji Daxue Xuebao(J Xidian Univ.),2001,28(3):373-377.
[8]陈淼峰.基于EMD与支持向量机的转子故障诊断方法研究[D].长沙:湖南大学,2005.
[9]陆文聪,陈念贻,叶晨洲,等.支持向量机算法和软件ChemSVM 介绍[J].计算机与应用化学,2002,19(6):697-702.
