基于FPGA的电动助力转向系统
2014-03-16付安英徐国艳
许 庆 ,高 峰 ,付安英 ,徐国艳
(1.北京航空航天大学 北京 100191;2.陕西国际商贸学院 陕西 咸阳 712000)
随着汽车电子技术的发展,电动助力转向(Electric Power Steering,EPS)系统正逐渐取代广泛使用的液压助力转向系统[1]。电动助力转向系统的效率更高,灵活性更强,助力可由多个输入参数联合控制,也有利于车辆各系统的高度集成和综合控制[2]。
文中利用硬件描述语言,设计了基于FPGA的助力转向系统控制模块。相比常见的使用ECU搭配对应的控制软件的系统,纯硬件电路组成的结构更加可靠;由逻辑电路代替软件实现控制算法,可使系统响应速度由毫秒级提升至纳秒级[4];批量生产压片的成本也大幅降低。基于FPGA的电动助力转向系统能提高车辆的安全性、可靠性与灵活性,对车辆电动助力转向系统和主动转向系统都具有重要意义。
1 总体设计方案
1.1 布置方案
根据电机的位置不同,常见的电动转向助力方式包括转向轴助力式、齿轮助力式和齿条助力式3种[5-6]。文中选用转向轴助力式布置方案,助力电动机布置在靠近转向盘下方,并经蜗轮蜗杆机构与转向轴连接。

图1 电动助力转向系统布置方案Fig.1 Layoutof the EPSsystem
1.2 控制策略
作用在转向盘上力矩增量与对应转向器输出力增量的比值,称为路感强度。以齿轮齿条式转向器为基础的电动助力转向器的路感强度E为:
其中,dMh为作用在转向盘上的力矩增量;dF为转向器输出力的增量。
选用不同的助力特性将对转向操纵轻便性和驾驶员路感有不同影响。理想的助力特性应既能满足低速转向时有足够的轻便性,又能满足高速转向时具有良好的路感。一般将助力特性曲线设计成随着汽车行驶速度变化而变化,并称这种助力特性为车速感应型[7]。助力既是作用到转向盘上的力矩的函数,也是车速的函数。
为实现助力功能并保证驾驶员路感,文中根据力矩传感器、车速传感器和转向角度传感器的输入,在硬件电路寄存器中直接查表得到对应的电机驱动信号。当车速va=0时,相当于汽车在原地转向,助力特性曲线的位置居于其他各条曲线之上,助力强度达到最大。随着车速va的不断升高,助力特性曲线的位置也逐渐降低,直至车速va达到最高车速vamax为止。此时助力强度最小,而路感强度达到最大。查表方式牺牲一定的灵活性,但具有以下优点:
1)适合于不同车型。在不同车辆上安装时,只需测试并改写表中数据;
2)响应速度快。控制量通过离线计算与测量得到,工作时直接查得地址对应的控制量,而无需计算;3)结构简单,易于调试。
2 控制系统设计
系统采用自顶向下设计。EPS顶层模块包括频率计数模块、数据读取查询模块、脉宽调制模块3部分。频率计数模块的主要作用是接收从传感器传出的频率脉冲信号,将其转换为数字量,并对模拟信号提供A/D转换后的数字接口;数据读取查询模块通过查表的方式,由频率计数模块读取的传感器输入信号查询映射得到电机控制信号;脉宽调制模块用于产生一连串定频调宽的不同占空比数字信号以控制电机。
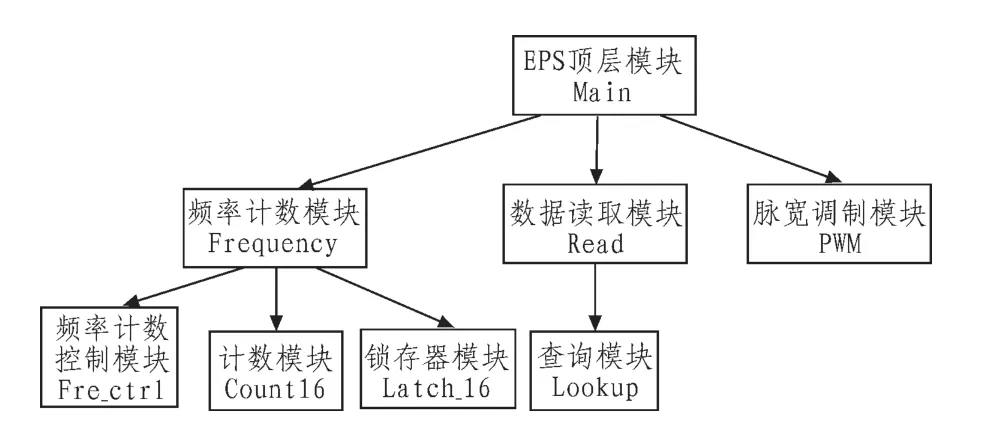
图2 基于Top-down设计的模块关系Fig.2 Relationship ofmodules based on Top-down design
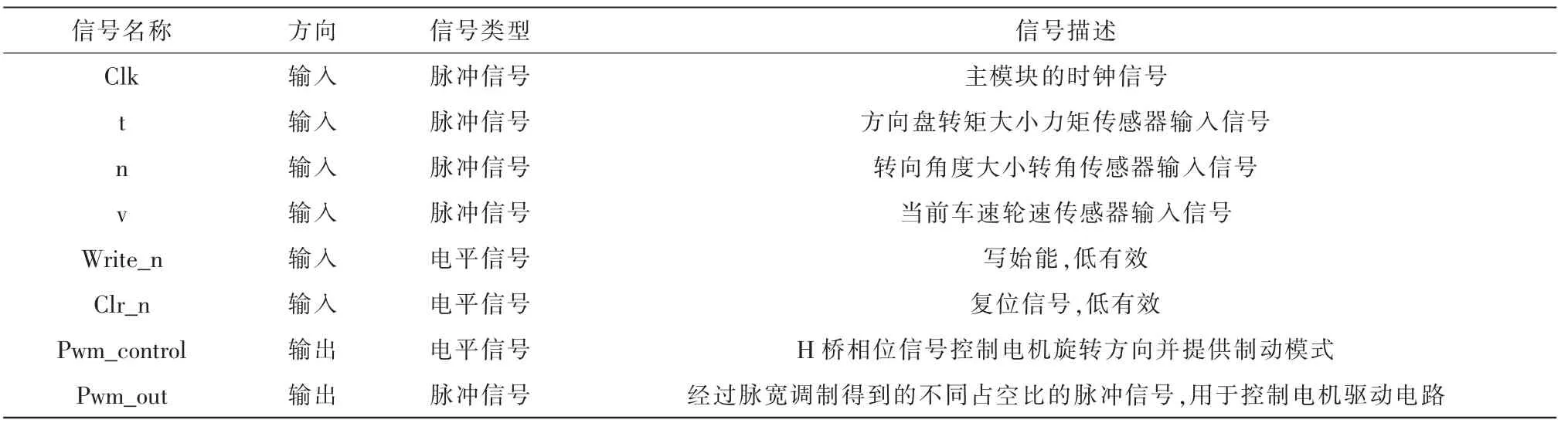
表1 顶层模块主要接口Tab.1 M ain interfaces of the top m odule
2.1 频率计数模块
频率计数模块采用一基准时钟,在单位时间内对被测信号的脉冲计数,得到信号的频率。共含3个子模块:控制模块、计数测量模块和锁存器模块。
其中,控制模块用于产生count_en、count_clr和load3个控制信号,提供给计数模块与锁存器模块;计数模块带有始能端和异步清零端;锁存器模块存储并输出load信号处于上升沿时刻的测量值。
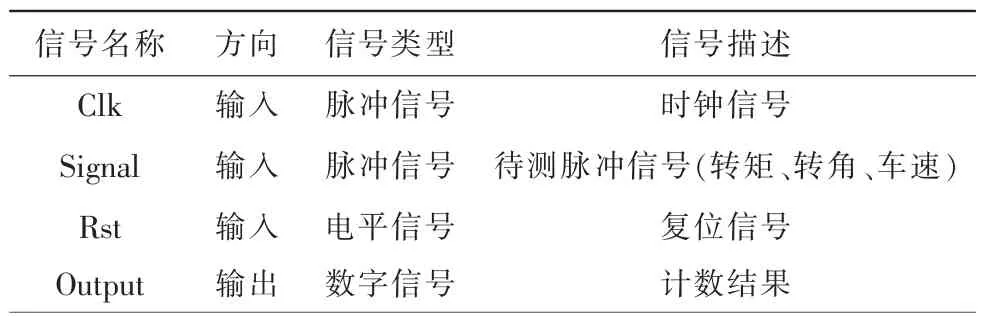
表2 频率计数模块主要接口Tab.2 M ain interfaces of the frequency counting module
2.2 查询模块
查询模块将输入信号合成地址,查表输出对应的电机驱动信号。查询模块将助力控制、回正控制和阻尼控制3个模式放入同一表中,使结构紧凑简单。其中,助力模式为具有一定输入扭矩并开始转向——即有一定转向角度时的控制模式,对应的不同速度下的响应曲线经试验完成。回正模式用于几乎无扭矩输入时,帮助驾驶员将车轮回到直线行驶的中间位置。特别的,在车辆低速时,提供较大回正力矩,帮助车轮迅速回正;在高速时,车辆自身回正力矩较大,模块用于避免方向盘超调和左右摆动,提高转向稳定特性。阻尼模式下电机处于制动状态,抑制高速时路面干扰引起的横摆振动并帮助方向盘回正收敛,提高车辆高速直线行驶稳定性和快速转向收敛性。
2.3 PWM模块
转向电机通过H桥控制,PWM模块提供电机驱动电路的输入信号。
3 系统测试与结果分析
编译程序,得到实现系统硬件所需逻辑单元为109个。将电路文件烧写至FPGA,在试验台架上于不同工况下测试 系统,测试结果截图如图3所示。

图3 不同车速下的查表测试Fig.3 Test resultwith different vehicle velocity

表3 PWM模块主要接口Tab.3 M ain interfaces of the PWM module
显然,系统模块正确读出了车速传感器脉冲信号的周期,并能根据查询表中给出的预定数值读出所需要的控制脉宽。经脉宽调制,可产生符合要求的不同占空比的电机驱动信号。下载试验表明,所设计的控制单元能够满足EPS系统的控制要求。
4 结束语
文中设计了基于FPGA的汽车电动助力转向系统。该系统的主要控制部分全部由硬件描述语言编译为硬件电路实现,电机控制输出与传感器输入信号直接对应,极大地提高了系统的响应速度。试验台架测试表明,系统的助力效果显著,并能提供给驾驶员良好的路感,可以满足汽车电动助力转向的要求。
[1]晋兵营,宁广庆,施国标.汽车电动助力转向系统发展综述[J].拖拉机与农用运输车,2010(37):1-5.JIN Bing-ying,NING Guang-qing,SHIGuo-biao.Overview of Development on Vehicle EPSsystem[J].Tractor and Farm Transporter,2010(37):1-5.
[2]荆体魁.汽车电动助力转向系统的设计 [D].大连:大连理工大学,2005.
[3]王江锋.智能车辆[D].北京:北京航空航天大学,2006.
[4]Palnitkar Samir,夏宇闻.Verilog HDL数字设计与综合[M].北京:电子工业出版社,2009.
[5]王望予.汽车设计[M].北京:机械工业出版社,2004.
[6]Oshita S,Mouri T,Uemura Y.Electric power steering system:U.S.Patent4,664,211[P].1987.
[7]庄继德.汽车电子控制系统工程[M].北京:北京理工大学出版社,1998.