永磁同步电机的弱磁控制方法
2014-03-16冯友兵陈坤华叶艳根
司 文,冯友兵,陈坤华,叶艳根
(1.江苏科技大学 电子信息学院 ,江苏 镇江 212003;2.江苏大学 电气信息工程学院,江苏 镇江212013;3.铜陵新亚星焦化有限公司 安徽 铜陵244000)
随着越来越高的消费者期望对于先进的电动交通工具(EV)的表现,自动化生产商正在意识到设计下一代的电力推动系统将会很大程度上依赖于高性能表现的电机尤其是在电力交通工具的应用上。由于采用高能量的永磁体作为激励机制,永磁同步电机(PMSM)设计上采用高能量密度,高速度和高运行效率,这使得它成为主导自动化生产者首要的选择。
PSMS根据永磁体在转子中的位置和形状分类。3种普通的组群为:表面式,插入式,或者内嵌式的PMSM。表面安装式和插入式PMSM,他门的永磁体被暴露在空气隙里[1]。内嵌式PMSM(IPMSM)把它的磁体埋在转子内部,由于其q轴的电感比d轴的电感高很多,具有更高的弱磁能力。
由于永磁同步电动机自身具有比感应电动机更为优越的性能,而且其dq变换算法相对简单、电机转子磁极的位置易于检测,因此交流调速的矢量控制理论在永磁同步电动机的控制领域也得到了同样的重视,有关永磁同步电动机矢量控制研究的成果陆续发表[2-3],对矢量控制的不同电流控制策略的研究成为了永磁同步电动机矢量控制研究的重点部分。与此同时,对永磁同步电动机的调速控制性能也提出了更高的要求:高性能的永磁同步电动机调速系统除了要有良好的转矩控制性能外,还应具有较宽的调速范围[4]。随着永磁同步电动机转矩的增加,电机定子绕组的反应电动势必然升高,当反电动势达到电机的额定电压或是逆变器的直流侧电压时,电机的输入电流将不能跟踪控制器的输出给定电流,引起电机的输出转矩的降低。此时,要设法减小永磁同步电动机的反应电动势一一即弱磁控制,以增加高速时电机的转矩输出能力。
这里有两个基本的方法用来实施PMSM的弱磁控制。其中之一是从电机结构设计提高永磁同步电动机的弱磁能力,另一个是从改进控制方法角度提高永磁同步电动机的弱磁能力。电机的结构设计者有能力提高电机的弱磁能力,通过改变电机结构和励磁激励方法比如采用环形铁安装在磁铁表面和磁栅间,通过变化电枢绕组连接来改变磁路,来降低永磁体的磁性[4]。虽然内置式永磁电机驱动的弱磁控制依赖于机械设计,但合适的控制策略也是必须的,以此来获得最大输出转矩。电子控制方法总体上是控制定子电流部分:控制d轴和q轴的电流来抵消由转子磁体产生的固定幅值的空气磁隙。这种表现和弱磁调试的他励直流电机方法相似。
文中将详细讨论永磁同步电动机的矢量控制,在推导其精确数学模型[5-6]的基础上分析矢量控制理论用于永磁同步电动机控制的几种电路控制策略,包括了id=0控制,最大转矩/电流控制,最大输出功率控制,最小磁链转矩比控制,最大电压转矩比等。
1 弱磁控制的基础
1.1 PMSM模型
接下来的PMSM数学模型和所有的变量单位统一,同时在以d-q转子参考系中建立,定子电压等式在转子参考系中[6]的给定如下:

其中,vd和vq是d轴和q轴的端电压,id和iq是d轴和q轴的电枢电流,Rs是定子电阻,Ψf是永磁磁链,Ld和Lq是d轴和q轴的定子电感,ωr是每单位的角速度p是导数算子。
对于电机驱动,最大电流和电压必须限制在系统内。考虑到电机和逆变器的限制,电流和电压如下表示:
其中ilim和ulim分别是被归算到PMSM的最大电流和直流侧最大电压。电压和电流限制影响电机驱动系统的额定转矩下最大速度和电机驱动系统的最大转矩产生能力。对于像电动车驱动系统的运用,在弱磁控制下拥有最广泛的恒功率调速范围是较理想的电动车驱动系统。
1.2 弱磁操作运行
依据等式(1)到(3)忽略定子电阻,稳态电压约束如下显示:

电磁转矩Te能被以下表达:

其中np是极对数。转子的转速能如下表达:

其中Tl是外部负载转矩,B是电机和负载的粘性摩擦系数。
公式(4)显示是电压限制约束定义的一个椭圆,它的形状成反比例的随速度变化。椭圆的中心被看做为无限速度运行点,运行点聚集为一点在高速状态。一个给定的运行点将不会超过电压或者电流限制约束如果它位于电压限制圆和电流限制圆的交点处或者在电压电流限制圆之内。但是,为了在弱磁区域获得最大的转矩,电机必须同时运行在电压和电流限制模型中[7],如图1所示。依据运行状况,两个弱磁运行方式可以分为:
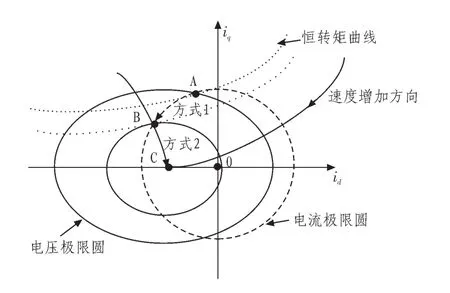
图1 永磁同步电机弱磁运行轨迹Fig.1 PMSM weakening running trajectory
方式1:电流和电压限制区域。当速度上升或者DC电压下降,电压椭圆收缩,电机驱动运行在电压、电流限制区域中,此时的电机运行点在沿着线AB,例如在电流限制曲线和电压的交点。
方式2:电压限制区域,当速度进一步上升,电机运行在电压限制中,为获得最大转矩将沿着线BC运行,例如从转矩曲线与电压限制椭圆相切点到椭圆中心点的连线。
对于电机的弱磁控制,为了更好的得到电机驱动的控制,必须研究电机的弱磁控制策略,下面将着重介绍。
2 基于弱磁的PMSM矢量控制方法
PMSM能工作在一个广泛的恒定功率运行区域中通过弱磁控制用作牵引应用中,并且d和q轴电枢电流将会根据速度和转矩的要求而发生变化,从而获得d和q轴的电枢电流,永磁同步电动机的用途不同,电动机电流矢量控制方法也各不相同。可采用的控制方式主要有:控制,最大转矩/电流控制,最大输出功率控制,最小磁链转矩比控制,最大电压转矩比等。
在图 3~5中,当电机角速度 ωr<ωr1时定义为区间一,当电机的角速度ωr1≤ωr≤ωr2时定义为区间二,当电机角速度ωr2≤ωr时定义为区间三。
2.1 id=0控制
id=0时,从电动机端口看,相当于一台他励直流电动机,定子电流中只有交轴分量,且定子磁动势空间矢量与永磁体磁场空间矢量正交,电动机转矩中只有永磁转矩分量,其值为:

2.2 最大转矩/电流控制(MTPA)
在电机基速以下时,为了充分利用定子电流,要求在电机给定转矩条件下,控制定子电流的模值最小,电机进入区间一(图2中OA段)内运行。
问题等效为式(2),式(5)满足的条件极值问题,根据拉格朗日极值定理,引入辅助函数

式中λ为拉格朗日乘子。对式(8)求偏导,并令其等于零,对式进行求解便可以得到直轴电流id和交轴电流iq的关系为

由电机此时运行的区间可以知道,此时的直轴电流应该为负,则可得:

随着iq的增大,iq按照式(10)变化时,可得到电机的最大转矩/电流控制的轨迹,如下图2中所示的OA段。
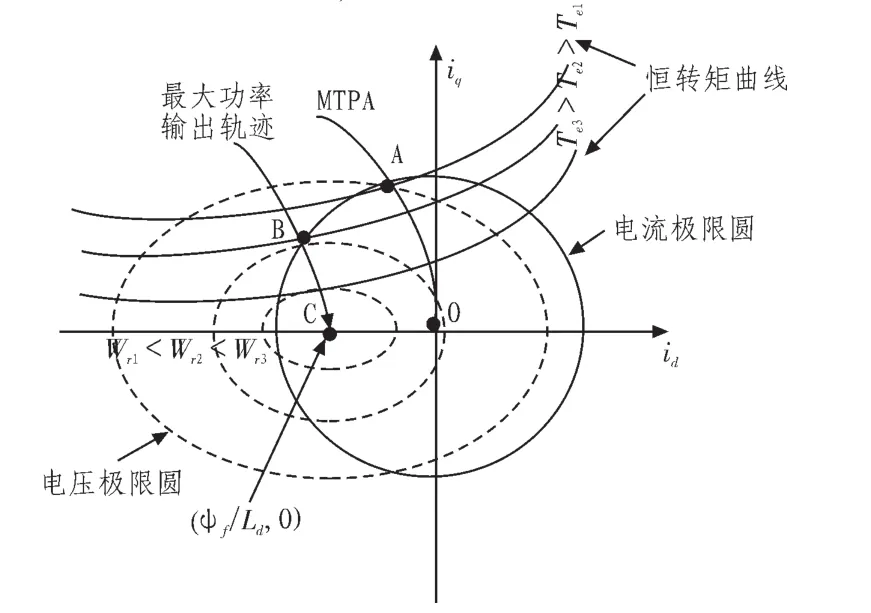
图2 定子电流矢量轨迹(Ψf/Ld<ilim)Fig.2 Stator current vector trajectory
2.3 转速过度区域
在电机转速超过基速,还未达到转折速度时,受到电压和电流极限环的限制,电机进入区间二(图2中AB段)内运行。为最大限度利用逆变器容量,控制电流矢量沿着电流限环逆时针向下。当电动机运行于某一转速ωr时,由电压方程可得到区间二内弱磁控制时电流矢量控制方程如下:

由此便可确定电流的轨迹路线,其轨迹路线如图3中所示的AB段,由式(11)可以得出:

2.4 最大输出功率控制
电动机超出转折速度后,电机进入区间三(图2中BC段)内运行时,对定子电流矢量的控制转为弱磁控制。此时定子电流矢量沿着电压极限圆轨迹取值。电动机超过某一转速后,在任一给定转速下,在电动机电压极限圆轨迹上存在着一点,该点所表示的定子电流矢量使电动机输入的功率最大,相应的输出的功率最大。其定子电流矢量的求解如下:
电动机运行于某转速ωr下而输出功率最大时应为:

联立电压方程(4)可得电动机输入最大功率时直,交轴电流

由此便可得到电机的最大输出功率控制轨迹,如图2中所示的BC段。
2.5 最小磁链转矩比轨迹
由电机数学模型知电机的定子磁链方程为:

其中Ψd、Ψq分别是d、q轴的磁链,为定子磁链矢量。
电动机超出转折速度后,进入区间三(图3中BC段)内运行。
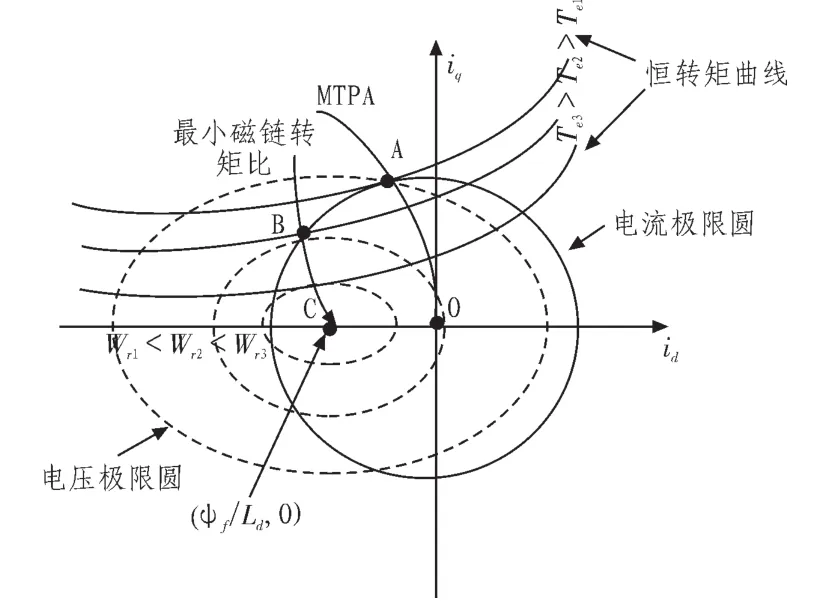
图3 最小磁链转矩比的定子电流矢量轨迹(Ψf/Ld/i lim)Fig.3 Minimum torque-pre-flux trajectory
可选择最小磁链转矩比轨迹运行,由式(15)和(16)可知:

在某一转矩下可以联立式(5)和(17)可以得到合成磁链与直轴电流的关系式:


式(19)为最小磁链转矩比的轨迹。再联立式(19)和转矩公式(5)便可分别得到直轴电流id和交轴电流iq,在逆变器母线电压一定时,电机的电角速度跟合成磁链成反比,因此采
对于一确定转矩可以得到最小的合成磁链,令用最小磁链转矩比控制可以在保持电机转矩输出能力不变的前提下有效拓宽电机的调速范围。最小磁链转矩比轨迹几何上实际是力矩曲线与最大磁链轨迹的切点轨迹,如图3所示。
由式(19)可以得到:
2.6 最大转矩电压比(MTPV)
电动机超出转折速度后,电机进区间三(图4中BC段)内运行,可选择最大转矩电压比,进行电流路径规划。此时永磁同步电机沿着最大转矩电压比曲线运行,dq轴电流主要受到电压限制点的约束。根据拉格朗日极值定理,引入辅助函数:

式中λ为拉格朗日乘子。对式(33)求偏导,并令其等于零,求解便可以得到直轴电流id和交轴电流iq的关系为:

式(22)为最大转矩电压比轨迹。再联立式(22)和转矩公式(5)便可分别得到直轴电流id和交轴电流iq。最大转矩电压比的轨迹几何上实际是电压极限椭圆和转矩双曲线切点的连线,如图4所示。

图4 MTPV定子电流矢量轨迹(Ψf/Ld<ilim)Fig.4 The Stator current vector trajectory of MTPV
由式(22)可以得到:

将式(23)代入式(21)中的偏导式得到:

由此便可得到最大转矩电压比的轨迹,如图4中所示的BC段。
3 结束语
永磁同步电动机的矢量控制就是通过分别控制定子电流的大小和相位,来达到控制电动机转矩和转速的目的,本论文详细讨论id=0控制,最大转矩/电流控制,最大输出功率控制,最小磁链转矩比控制,最大电压转矩比等几种控制方式。id=0控制是一种最简单的控制方法,该方法无去磁效应,控制算法简单,电磁转矩与定子电流成正比。其主要缺点是随着输出转矩的增大,功率因数下降较快。另外,电磁转矩中的磁阻转矩部分未能利用,因而主要运用在对隐极永磁同步电动机的控制上;最大转矩/电流控制,可以是电动机输出转矩满足一定要求的条件下,逆变器的输出电流最小,这利于逆变器的功率开关器件的工作,减小了电机的铜耗。但是,该方法的缺点是控制算法的开销很大,普通的单片机的运算能力无法承担,需要使用高速度的中央控制器;最大输出功率控制,保证电机在高速情况下已最大能量利用率运行,大大的节约了运行成本;在逆变器母线电压一定时,电机的电角速度跟合成磁链成反比,因此采用最小磁链转矩比控制可以在保持电机转矩输出能力不变的前提下有效拓宽电机的调速范围;最大电压转矩比控制,实现了对直流母线电压的最大利用,但该算法对电机参数和负载条件敏感,鲁棒性差。
[1]Husain I.Electric and Hybrid Vehicles:Design Fundamentals[C].1sted.,New York:CRC Press.2003,150.
[2]Uddin M N,and Rahman M A.High-speed control of IPMSM drives using improved fuzzy logic algorithyms[J].IEE Transactions on Industrial Electronics,2007,54(1):190-199.
[3]Deak C.Binder A.Funieru B.etal.Extended field weakening and overloading of high-torque density permanentmagnetmotors[J].in 2009 Energy Conversion Congress and Exposition,2009:2347-2353.
[4]Kwon T.Sul S.Alberti L.etal,N.Design and control of an axial-fluxmachine for awide flux-weakening operation region[J].IEEE Trans.Ind.Appl,2009,45(4),1258-1266.
[5]唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,2002.
[6]王秀和.永磁电机[M].北京:中国电力出版社,2007.
[7]刘雪菁.永磁同步风力发电机组控制策略的仿真研究[J].计算机仿真,2009,26(3):264-267.LIU Xue-jing.Simulation of control strategy ofwind turbine with PermanentMagnet(PM)generator[J].Computer Simulation,2009,26(3):264-267.