别了,欧洲货运飞船!—最后一个“自动转移飞行器”升空
2014-03-14郭筱曦,许国彩
别了,欧洲货运飞船!—最后一个“自动转移飞行器”升空
2014年7月29日,阿里安-5ES火箭成功将欧洲航天局(ESA)的第5个、也是最后一个“自动转移飞行器”(ATV-5)送入目标初始轨道,执行“国际空间站”(ISS)货运补给任务,开启“自动转移飞行器”系列的谢幕之旅。飞船用自身推力器提升轨道,8月12日与“国际空间站”交会,自动停靠在星辰号服务舱的对接口上。对接前,飞船已自由飞行逾6×106km。
此次任务中,“自动转移飞行器”共向“国际空间站”运送超过6.5t食物、水、衣物、备用硬件和科学材料,而它自重亦达13t,ESA官员介绍说,满载的自动转移飞行器-5是阿里安-5火箭投入使用以来发射过的质量最大的有效载荷,亦是2011年美国航天飞机退役后质量最大的“国际空间站”到访航天器。任务预计持续到2015年1月。
此次任务的亮点除了是“自动转移飞行器”系列的谢幕之旅外,还试验了新型交会敏感器。
1 “自动转移飞行器”计划回顾
自1987年起,欧洲工业界就在ESA领导下进行“自动转移飞行器”的概念和系统研究工作。早在1988年,几个欧洲国家与美国和其他“国际空间站”合作伙伴签订了“政府间协议”,承诺参与“国际空间站”计划。1992年,ESA开始与美国航空航天局(NASA)联合研究。1994年,在俄罗斯加入“国际空间站”计划后,ESA决定建造“自动转移飞行器”。1995年10月举行的部长级ESA会议正式批准“自动转移飞行器”的全面研制计划。在“国际空间站”合作伙伴中,ESA代表涉及“国际空间站”计划的10个欧洲国家(比利时、丹麦、法国、德国、意大利、荷兰、挪威、西班牙、瑞典和瑞士),同时包括哥伦布号实验舱和“自动转移飞行器”项目。
“自动转移飞行器”计划涉及这10个欧洲国家的许多公司及数以千计的技术人员和工程师,主承包商为空客防务与航天公司[前欧洲航空航天防务集团(EADS)],管理着来自这10个欧洲国家的30多家分承包商及约2000名技术专家和工程师。同时参与合作的还有8家俄罗斯公司,主要由俄罗斯能源火箭航天集团(RKK Energia)牵头,负责建造“自动转移飞行器”对接机构、燃料补加系统和相关电子设备。空客防务与航天公司和法国政府的共有企业阿里安航天公司是全球首家商业空间运输公司,研制了专用于“自动转移飞行器”的阿里安-5ES火箭。

与“国际空间站”对接的自动转移飞行器-5
ESA按比例向NASA偿付的“国际空间站”运行成本中,大部分是以实物抵资(包括“自动转移飞行器”)的方式,而非货币支付。ESA在13年间用于“自动转移飞行器”计划研制的预算约13亿欧元,包括建造地面设施、第1个“自动转移飞行器”及其首航,后续每个“自动转移飞行器”建造成本约4.53亿欧元,足够偿付2017年前的“国际空间站”运行成本。
命名
ESA将每个“自动转移飞行器”都以欧洲科学家和思想家的名字命名。自动转移飞行器-1名为“儒勒·凡尔纳”(Jules Verne),19世纪法国科幻作家和预言家。自动转移飞行器-2得名于17世纪德国天文学家约翰尼斯·开普勒(Johannes Kepler),任务时间为2011年2-6月。自动转移飞行器-3为纪念意大利物理学家爱德华多·阿玛尔迪(Edoardo Amaldi),2012年3-10月在轨。自动转移飞行器-4以伟大的物理学家阿尔伯特·爱因斯坦(Albert Einstein)的名字命名,2013年6-11月在轨。自动转移飞行器-5在2012年2月获名“乔治·勒梅特”(Georges Lemaître),以纪念这位比利时天文学家和宇宙学家,他被认为是宇宙起源“大爆炸理论”之父。
越来越完善
“自动转移飞行器”的设计可靠性非常高,ESA称其执行预定任务的成功率可达98%。对接时,至少有三道防线保护“国际空间站”及其乘员。
自动转移飞行器-1首航标志着欧洲航天器在“国际空间站”补给任务中的首次交会对接。从那以后,“自动转移飞行器”一直在改进。首次任务完成,飞行后的分析工作指出了130项技术改进建议,其中约有30项纳入到后续“自动转移飞行器”设计当中。从电气故障和卡住的通信天线支臂,到分离的隔热层和拒不工作的风扇,每个“自动转移飞行器”都有一堆不危及任务的小缺陷。
“自动转移飞行器”团队对于每次任务都进行循环改进过程,并及时商定纠正和应急措施,由业界和合作伙伴进行评审是工作的一部分。挑战是在每次任务中升级有关系统,更要应对千变万化的货物舱单。从前一次任务结束到下一次“自动转移飞行器”发射通常为半年,因此实施更新的时间就剩下得很少。
充分利用博客
ESA网站上为“自动转移飞行器”开辟的专栏博客(blogs.esa.int)已成为该计划的一大特色且高度成功。“自动转移飞行器”博客是非常受欢迎的消息来源,现在被众多顶级媒体、航天爱好者网站及社交媒体永久链接并经常引用。
自2010年以来,ESA的“脸书”(Facebook)主页差不多有621000的页面访问量,证实了它的成功准则:以友好而非正式的文体发布的语录、采访、视频和评论带来“人情味”。博客赢得了任务更新权威来源的口碑,连“自动转移飞行器”任务主管都直接回复博客访者。
自2013年以来,“自动转移飞行器”社交媒体覆盖已扩展到包括流行的@esaoperations推特频道。这已额外产生了3500万来自库鲁、“自动转移飞行器”控制中心和“国际空间站”的新闻和实时更新浏览量。
“自动转移飞行器”任务的所有方面都一一报道,从发射准备、航天员训练、点火升空、对接直到再入,博客在关键任务阶段提供了快速、实时的更新。
2 运输系统
运载火箭
阿里安-5是由阿里安航天公司运营的一次性运载火箭。阿斯特留姆公司(前欧洲航空航天防务集团子公司,现属空中客车集团)是火箭的主承包商,并负责组装火箭。阿里安-5用于发射地球同步转移轨道和近地轨道有效载荷。火箭从法属圭亚那库鲁航天中心发射。阿里安-5火箭在ESA和法国国家空间研究中心(CNES)授权下制造。
自1996年首次发射以来,阿里安-5已累计发射73次。凭借这一纪录,它已成为欧洲航天发射市场的主力军,并将至少运行至2015年。火箭久经飞行考验,成功69次,失败2次,另外2次被认定为部分失败。
阿里安-5是“阿里安”系列的第5种火箭,但并不是直接衍生自早先型号的产品。阿里安-5ES具有阿里安-ECA火箭相对于早先阿里安-5所做的所有提升改进,但仅用于发射“自动转移飞行器”入轨。
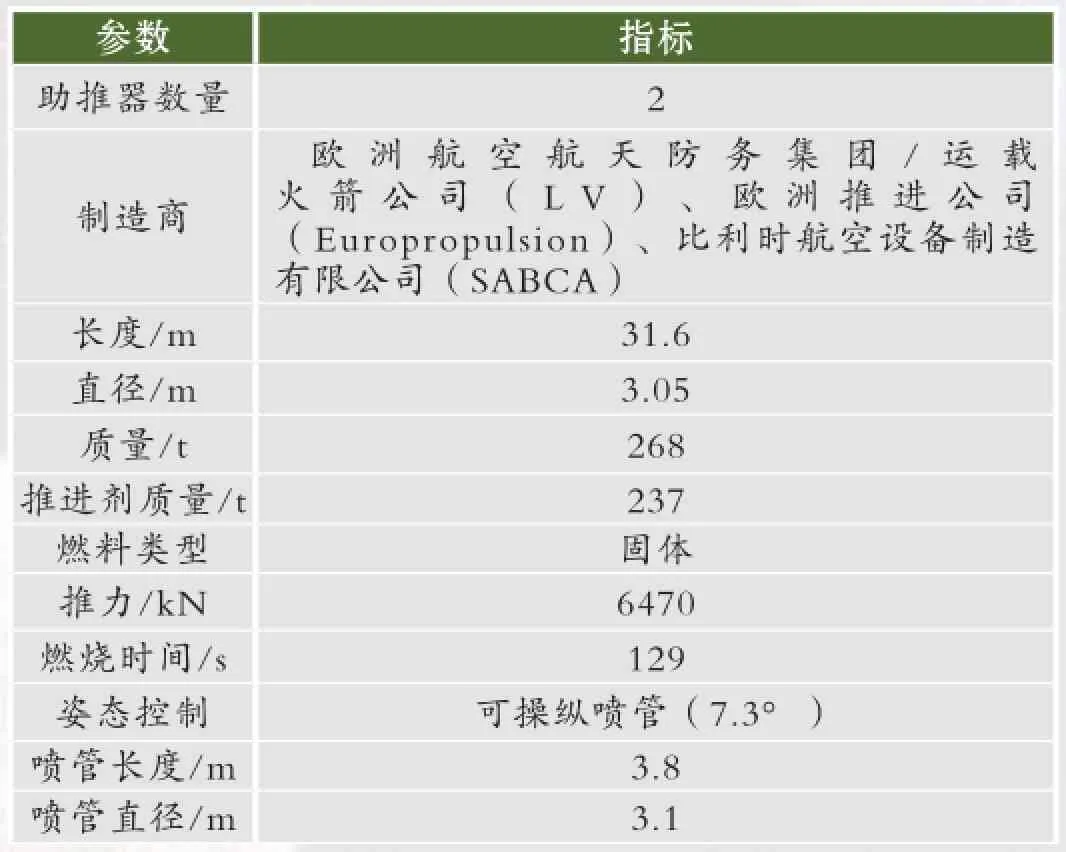
固体火箭助推器参数
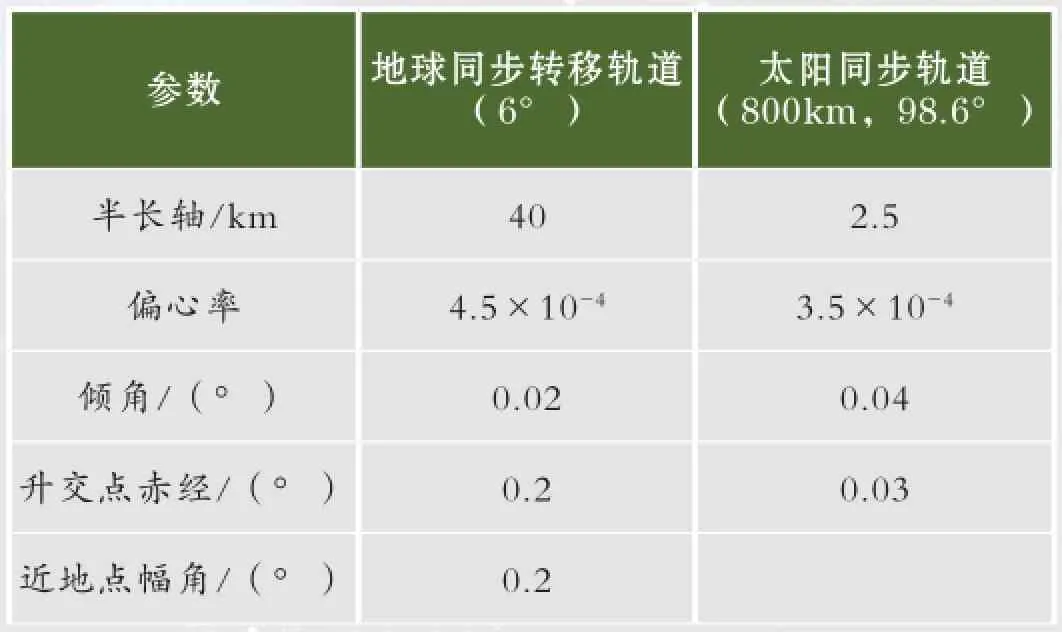
阿里安-5ES入轨精度
自动转移飞行器-5任务
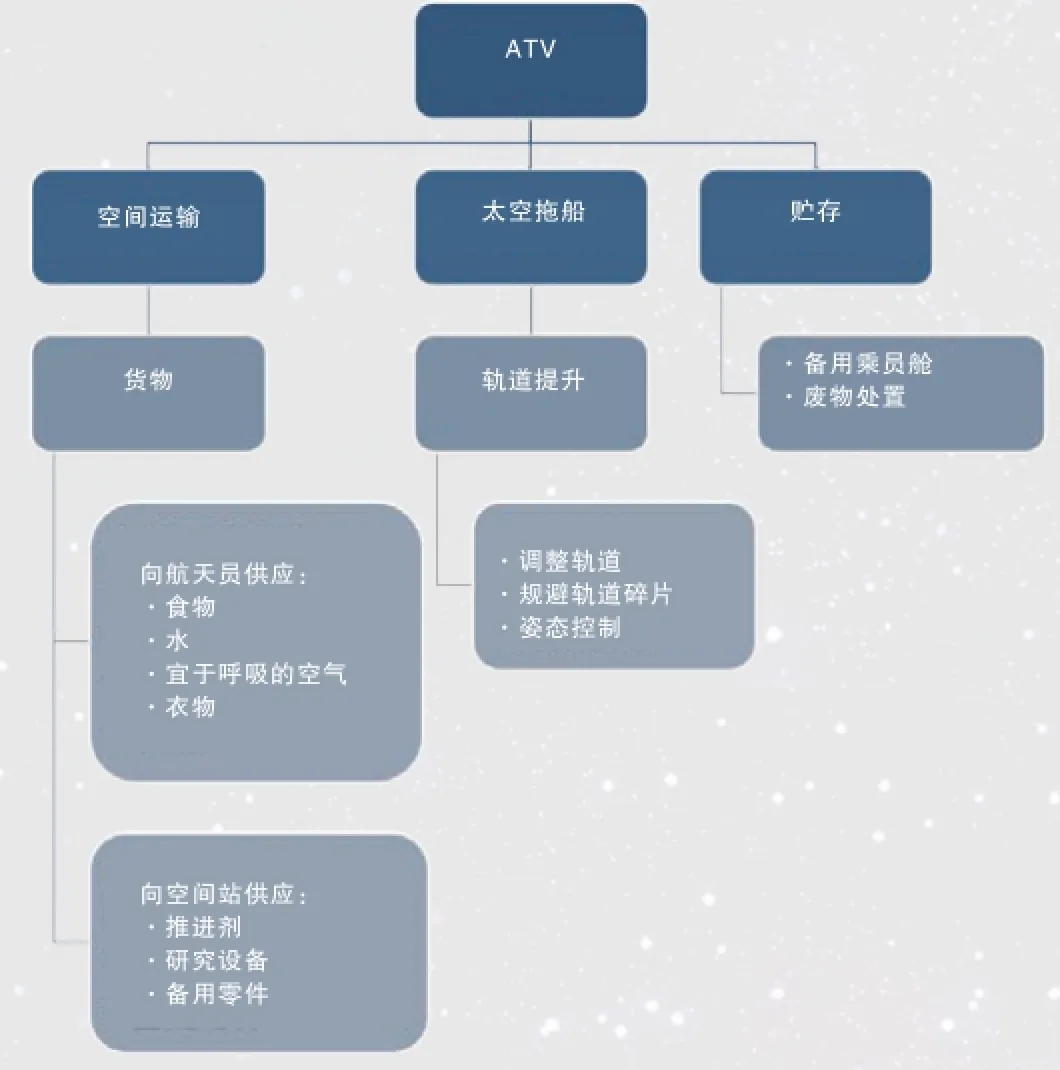
“自动转移飞行器”货运飞船
“自动转移飞行器”主体是一个圆柱体,长10.3m,直径4.5m,“X”形太阳电池翼翼展22.3m,外部覆有铝箔层和微流星体防护板。“自动转移飞行器”采用模块化设计,可将不同的舱段、模块平行集成、测试,同时考虑后续任务,可兼容不同的模块。“自动转移飞行器”在结构上分为集成货运舱和服务舱两个舱段。
“自动转移飞行器”与“国际空间站”对接、停靠时间长达6个月,期间可为“国际空间站”提升轨道高度,执行姿态控制和轨道碎片规避机动。
作为欧洲迄今最复杂的航天器,“自动转移飞行器”具有高度自主导航和自主交会对接的能力。其精确性让它在轨表现出色,自动转移飞行器-4的对接极其精准,飞船只偏离对接目标中心11mm,甚至没有接触到周围的对接锥体。除俄罗斯和中国飞船以外,“自动转移飞行器”是另一种能够自动对接的飞船。
3 任务运行
“自动转移飞行器”自动导航、飞行、与“国际空间站”对接,但确实需要一些地面支持,一次“自动转移飞行器”任务需要分散在世界各地的空间机构之间复杂交会并分担责任。任务运行是一套非常复杂的成文规则和规程,对于“自动转移飞行器”这样的复杂任务至关重要,主要目标是维持与“自动转移飞行器”的实时不间断交互。这项重要工作对于任务是必需的,并需要即时处理飞船的所有遥测数据、参数及其他数据。因为“自动转移飞行器”高度自动化,所以地面控制人员基本上只是监视它的飞行,并在预先确定的步骤向飞船发送“Go”指令,然后执行下一条预编程序列。具体到“自动转移飞行器”,任务运行涉及:
1)库鲁发射场,ESA位于法属圭亚那,阿里安-5ES火箭从这里发射“自动转移飞行器”。
2)“自动转移飞行器”控制中心(ATVCC),位于法国图卢兹,地面团队在这里控制“自动转移飞行器”任务。控制中心与“自动转移飞行器”联通以控制和监视其运行状况和性能,并在需要时发送指令。控制中心与“自动转移飞行器”之间的通信由美国中继卫星或欧洲中继卫星[“阿蒂米斯”(Artemis)]传输,两条路径都随时可用。
3)莫斯科任务控制中心(MCC-M),因“自动转移飞行器”与“国际空间站”的俄罗斯段对接,所以在“自动转移飞行器”与“国际空间站”保持对接的6个月内,大部分时间由该控制中心控制。
4)休斯顿任务控制中心(MCC-H),负责整个“国际空间站”的任务控制,并协调“自动转移飞行器”和“国际空间站”的整体运行。
5)乘员,在交会和货物转移期间负责监控。
每个团队都有各自的工具:
1)飞行规则对飞行指挥官的决策有决定性影响;
2)飞行运行规划由“自动转移飞行器”控制中心飞行控制人员用于在地面执行两类程序:仅与“自动转移飞行器”相关的程序及地面控制后勤的一套程序;
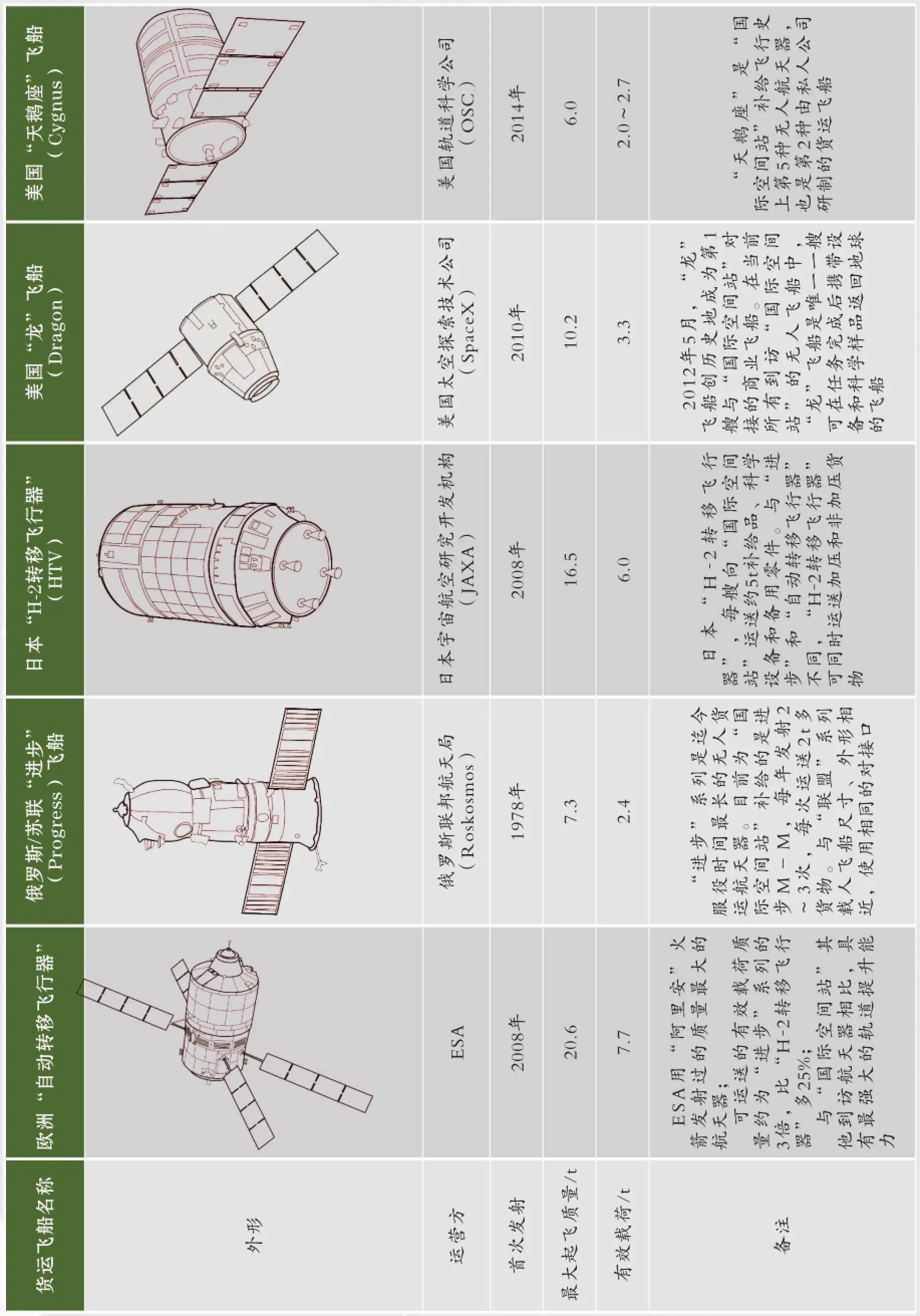
国外在役货运飞船性能对比
3)多元规程和操作接口规程是分配给各个控制中心及其接口的工作;
4)船载数据文件由在轨操作“自动转移飞行器”的航天员使用。
任务控制中心
在法国图卢兹航天中心典雅、现代的“费尔马大楼”中,CNES根据与ESA在2003年签订的合同,开拓并运营着一个专用于处理“自动转移飞行器”在轨任务的控制中心。在ESA授权下,“自动转移飞行器”控制中心负责准备和校验30名任务控制人员在飞行过程中所用的监控工具。控制中心还负责实施已编制的任务规划,如果需要的话还要落实变更。
在任务进行的全过程中,飞船由“自动转移飞行器”控制中心监控和指挥。控制中心昼夜工作,并与位于俄罗斯和美国的其他控制中心密切配合,所有指令都在与“国际空间站”合作伙伴协调一致的基础上运行。控制中心负责管理飞行中的操作并协调地面资源;负责“自动转移飞行器”的定轨和定位,并监视其接近“国际空间站”的过程,这是富有挑战的工作,需要有很高的专门技术能力。在各种飞行控制和领航能力之中,控制中心还指引“自动转移飞行器”与“国际空间站”的对接解除过程,之后可以指挥“自动转移飞行器”留在“国际空间站”附近,最多可达8个星期,如果需要,还能执行二次对接。
“自动转移飞行器”所有的地面控制指令都从控制中心发出。为在任务中与其他控制中心持续协调并与“自动转移飞行器”不间断联系,控制中心依靠建在德国空间运行中心的地面互联子网络;控制中心与主管“自动转移飞行器”发射和调度的圭亚那航天中心协作;在交会、对接和离站阶段,控制中心与莫斯科和休斯顿的任务控制中心密切配合;控制中心还直接连到哥伦布控制中心,起ESA合作伙伴通信网络中心节点的作用。
乘员在任务飞行控制中的作用
在任务过程中,“国际空间站”上的乘员不参与驾驶“自动转移飞行器”,但需要在俄罗斯星辰号服务舱内用独立设备认真监控“自动转移飞行器”的状态。在任何时刻,只要他们认为安全受到威胁,都可以随时中断飞船的抵近。除容错设计外,“自动转移飞行器”控制人员还通过遥测技术监控“自动转移飞行器”。
(1)交会操作
“自动转移飞行器”与“国际空间站”之间的距离为40~50km时,无线通信链路一建立,“自动转移飞行器”遥测数据就显示给航天员。万一发生异常或故障,他们可以启动避碰机动,让飞船远离“国际空间站”。距离约250m时,进入最后30min的抵近过程,航天员用视频系统主动检查“自动转移飞行器”是否运转正常。在获得航天员批准后,“自动转移飞行器”控制中心的控制人员向“自动转移飞行器”发出指令走完最后几米。航天员仔细检查“自动转移飞行器”的慢动作接近过程,一旦“自动转移飞行器”没有停留在虚拟接近走廊内,航天员可以拒绝它继续接近。
(2)电视屏幕
航天员使用一块电视屏幕和一个16键控制面板监视操作。因为没有舷窗能直接看到“自动转移飞行器”,航天员只能依靠这个利用摄影机的2种变焦模式和“自动转移飞行器”前锥光学对准设备的简单而强大的系统。航天员可通过电视屏幕监视“自动转移飞行器”的位置和姿态,“自动转移飞行器”的必要遥测数据也显示在屏幕上。
航天员的监视作用在关键时刻非常重要,因为一旦发生故障他们可以随时插进。“自动转移飞行器”系统自动运行,与此同时,在地面上的“自动转移飞行器”控制中心飞行主管也可以中断“自动转移飞行器”抵近,即使航天员没有看到任何干扰因素。飞行控制人员可以利用更多参数分析“自动转移飞行器”的运行状况和性能。
航天员可以用4种不同方式中断“自动转移飞行器”的抵近过程:保持(HOLD)、撤回(RETREAT)、逃逸(ESCAPE)或中止(ABORT),取决于异常类型。
(3)对接后的操作
被“国际空间站”的对接机构捕获后,对接密封件加固,电气和流体连接建立。在经过几次检查后,航天员打开舱门,可以进入“自动转移飞行器”的加压货物段。
装在包袋、抽屉和机柜中的干货由航天员搬运,并由美国休斯顿任务控制中心监督。“自动转移飞行器”上加载的空气由航天员从货舱手动释放到“国际空间站”机舱中,淡水也从地面带上来。站上废液由阀门和软管转移到飞船上,废液还可用软塑折叠容器装。航天员有规律地向飞船内装填站上不再需要的废物和材料。“自动转移飞行器”的推进剂贮箱在对接时自动连到“国际空间站”本身的管道上。
在“自动转移飞行器”与“国际空间站”对接的全程中舱门都保持开启,乘员唯一的工作就是执行需要动手的搬运活动,每次最多有2名航天员同时工作,卸载补给品和进行试验,他们不负责轨道提升、姿态控制或加注管理。
4 新交会敏感器及其交会试验飞行方案
“自动转移飞行器”导航现基于合作目标交会技术,ESA已将其后续航天器发展目光投向与非合作目标(如轨道碎片或火星样品盒)的交会。为开发非合作目标交会技术,ESA开发了新型敏感器、图像处理,以及制导、导航与控制算法。自动转移飞行器-5为新技术和新硬件的空间试验及与现有导航敏感器之间的比较提供了难得机会,将成为实现空间非合作目标交会的第一步。
激光红外成像敏感器
激光红外成像敏感器(LIRIS)设计用于未来与非合作目标的交会,意味着只有追踪航天器需要导航敏感器,而目标不需要任何构建合作系统基础的敏感器、反射器或交会无线电天线。
ESA承包商空客防务与航天公司及其合作伙伴提出利用自动转移飞行器-5验证这一新方案,以提高非合作目标交会敏感器和制导、导航与控制的技术成熟度。LIRIS验证机由两部分组成,红外相机由法国Sodern公司提供,激光雷达由德国Jena-Optronik公司提供。
新敏感器安装在“自动转移飞行器”外部,记录装置存放在加压货舱内部,它们记录的数据不会被“自动转移飞行器”使用,但会在轨存储供以后下载、分析。当设计第1个“自动转移飞行器”时,相关结构就已预备容纳此类有效载荷,电缆也已从加压舱铺设到飞船外部。
LIRIS的数据记录仪将从“自动转移飞行器”上拆下,并由“联盟”飞船带回地球。
交会试验飞行方案
此次验证将覆盖交会的全过程,从至少30km外直到对接。可见光/红外(VIS/IR)相机敏感器将从远程运行至对接,而激光雷达敏感器从约3.5km的近程运行至对接。在400m以内,可见光/红外敏感器还可用于收集目标飞行器图像,然后用熟悉对象形状的计算机处理,推断出追踪器与目标之间的六自由度几何结构。
自动转移飞行器-5在2014年8月8日近距离飞越“国际空间站”的过程中进行了其中一部分试验,用LIRIS收集了一些数据,完成了本次飞行中的演示验证。在8月12日的最后抵近过程中进行了另外一部分试验。为更加全面地测试新型敏感器,飞船还在对接之前根据计划绕飞“国际空间站”。
在飞船抵近过程中,它使用4台R-4D-11主发动机执行较大的轨道调整点火,用28台姿态控制系统推力器执行较小的机动。自动转移飞行器-5经过S1/S2航路点(“国际空间站”后方39km、下方5km处),标志着与“国际空间站”的交会阶段正式起始。刚过S1/S2航路点后不久,LIRIS验证有效载荷的激光雷达系统启动,开始收集导航数据。在S2航路点,自动转移飞行器-5启动LIRIS红外成像仪,打开飞船的外部灯光,并启动“国际空间站”上的“航向”(KURS)系统,“自动转移飞行器”上的“航向”装置已提前通电。离开S2航路点前,自动转移飞行器-5过渡到对地指向姿态,让LIRIS继续指向“国际空间站”,方便导航数据收集。“自动转移飞行器”并不沿直线飞向“国际空间站”,而是选取节能路线,沿一条低于“国际空间站”轨道的弧线追赶,然后再次提升轨道进入“国际空间站”正后方的位置。

Sodern公司红外敏感器(左)和Jena-Optronik公司激光雷达光度头(右)
交会方式大不同
目前,世界上有美国、俄罗斯、欧洲、日本和中国研制的飞行器分别完成了与运行在地球轨道上目标飞行器的交会对接。迄今为止,全世界共计进行了370多次交会对接,其中美国和俄罗斯共占了340多次。美、俄的交会对接技术已经成熟并在“国际空间站”和载人登月中发挥了重要作用,两国交会对接技术也具有近距交会段分别以手控和自控为主的鲜明特色。以下简要介绍各国飞船的交会方式,其中,只有俄罗斯和中国的飞船实现过载人交会对接。
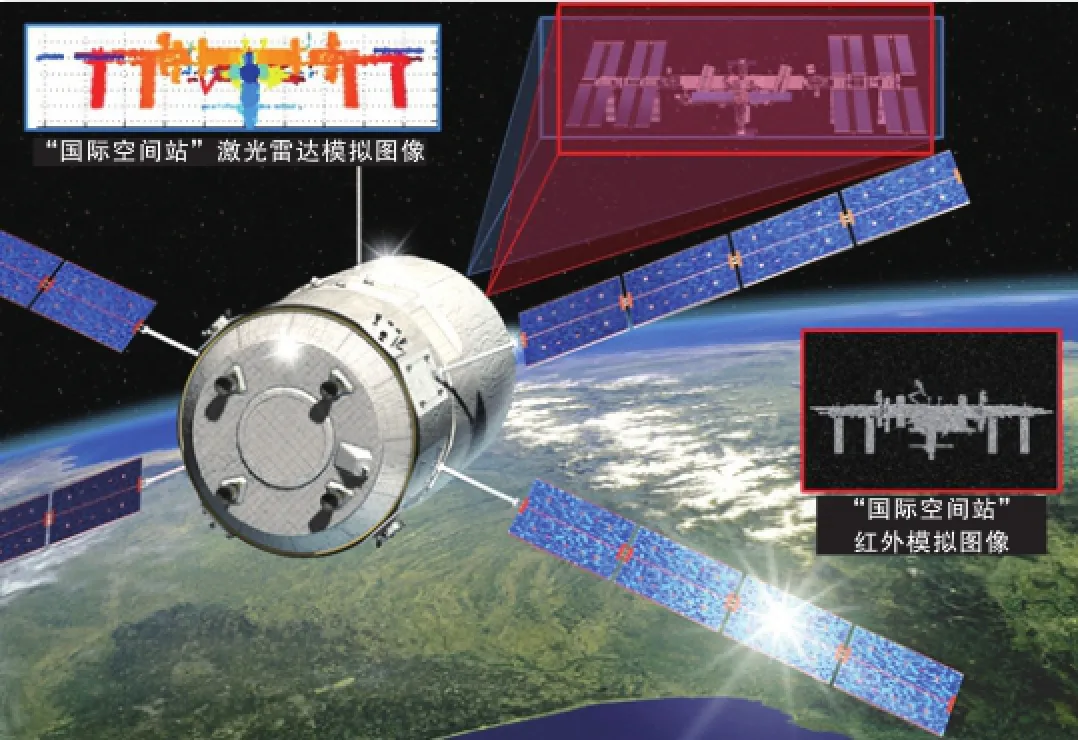
“自动转移飞行器”接近“国际空间站”时LIRIS捕捉图像示意图
俄罗斯“联盟”和“进步”飞船。俄罗斯“联盟”和“进步”系列飞船采用自动化“航向”系统与“国际空间站”交会,“遥操作模式控制”(TORU)系统作为备份,紧急情况下切换到手动控制。一般情况下俄罗斯飞船可靠性很高,不常换用手控模式,最近一次是2013年11月的进步 M-21M任务,在测试改进型“航向”系统时出现小故障,导致自动对接失败,由站上航天员手控对接成功。
中国“神舟”飞船。在交会经验方面,中国正在快速追赶,2011年发射天宫-1目标飞行器后进行了多次自动、手动交会对接操作试验,最近一次是由神舟-10飞船执行的载人交会对接任务。
日本“H-2转移飞行器”。“H-2转移飞行器”在抵近“国际空间站”的过程中应用“H-2转移飞行器”交会飞行软件(RVFS)。首先执行交会点火接近站体,然后用位于“国际空间站”日本实验舱里的邻近通信(PROX)系统与“国际空间站”通信,先后执行一次抵近初始(AI)点火和一次R-bar入轨(RI)点火,完成后即进入“国际空间站”阻进区域(KOS)。接近到10m距离时呈自由飞行状态,由站上机械臂将其捕获并停靠。
美国“天鹅座”飞船。“天鹅座”使用Jena激光雷达(LIDAR,光探测和测距)敏感器与“国际空间站”交会。针对交会过程中的近距导航,结合使用“三角测量和激光雷达自动交会与对接”(TriDAR)视觉系统。该系统由加拿大Neptec公司在NASA和加拿大航天局(CSA)支持下研制,利用基于激光的三维传感器和热像仪收集目标点的三维数据,通过软件与目标航天器的已知外形进行对比,从而引导飞船飞向对接口。该系统曾作为航天飞机的“分别礼物”成功进行过3次试验,即发现号的STS-128和131任务以及阿特兰蒂斯号的STS-135任务。

自动转移飞行器-5交会飞行方案
美国太空探索技术公司的“龙”飞船。在“龙”飞船最近一次任务中,飞船利用绝对GPS进行高度调整点火与共椭圆机动点火,到达距“国际空间站”2.5km处,从绝对GPS切换至相对GPS。经过一系列点火和检查点之后,飞船在距离站体250m处悬停,在此完成激光雷达和热成像仪的最后调整和验证。距“国际空间站”200m时,进入“国际空间站”阻进区域。在距“国际空间站”10m处开始自由漂移,由站上机械臂捕获。敏感器系统硬件的关键组成部分曾在发现号STS-133任务中接受过试验。
欧洲“自动转移飞行器”。不同于“天鹅座”、“H-2转移飞行器”和“龙”飞船,“自动转移飞行器”直接与“国际空间站”对接。“自动转移飞行器”导航现基于合作目标交会技术。远程交会时使用相对GPS导航,基于来自“自动转移飞行器”和“国际空间站”的GPS接收机测量结果数据。近程导航使用“自动转移飞行器”上的光学敏感器(视程仪和无线电测向仪),反射测量“国际空间站”上的一系列交会目标,即后向反射器。交会阶段,“自动转移飞行器”完全自主飞行,地面没有任何输入。随着飞船靠近“国际空间站”,其内部导航先从使用星敏感器切换至绝对GPS,在距离“国际空间站”30km处切换至相对GPS,在距离250m处切换至激光链路,最后使用视频目标系统。
(4)交会技术未来发展
美国“猎户座”(Orion)飞船对交会对接的自动性和自主性提出了更高的要求。关键技术包括自动交会算法、自主任务管理、自动相对导航敏感器技术、先进捕获和对接机构、机械臂组装技术。这些技术中许多已经成熟,关键的挑战是要将这些技术进行集成。
与小行星等天体交会相关的工作也在推进,NASA团队期望在下一个10年之初与一颗被捕获、重定向的小行星载人交会。
同样,先进科学概念(ASC)3D LIDAR测距相机已被“起源、光谱解译、资源鉴别和防护-风化层探测器”(OSIRIS-REx)行星科学任务选中。该任务计划于2016年发射,2023年将返回一件取自碳质小行星1999 RQ36的样品。
航天器在轨道上“看到”目标的技术进步也使地球上的人受益,LIDAR和TriDAR技术应用已拓展到农业和军事领域。
5 货运能力突出
“自动转移飞行器”目前是除俄罗斯“进步”货运飞船以外,唯一能够同时提供燃料补给、姿态控制和轨道提升的航天器,也是迄今为止已发射使用的运载能力最大的专用货运飞船。“自动转移飞行器”系列飞船货物上行能力突出,其总载货量约为俄罗斯“进步”系列飞船载货量的3倍,比日本“H-2转移飞行器”载货量也多150kg。
除运送多种多样的货物之外,“自动转移飞行器”还能满足后期装货要求。“国际空间站”的需求时常变化,任务控制中心、航天员和科学家经常在最后关头还有新想法。从自动转移飞行器-2任务开始,可以在发射前几星期内向飞船中加装干货。从自动转移飞行器-4任务起,库鲁航天中心安装了全新的后期装货专用通道(LCAM)设备,这是一部带有旋转平台和伸缩式装卸臂的专用升降机,用于装载更多后期货物到“自动转移飞行器”加压舱的各个角落中。
自动转移飞行器-5运送的货物总质量6555kg,液体货物3933kg,包括补加的推进剂860kg、水855kg、加压气体100kg及由科学试验材料、衣物和食物、乘员个人物品、各种“国际空间站”系统的维护物与日常生活所需的标准供给品组成的干货2622kg。
自动转移飞行器-5携带了860kg用于再加注的推进剂,未来可由“国际空间站”星辰号服务舱推力器用于“国际空间站”轨道提升、碎片规避机动及姿态机动。站上推力器使用的四氧化二氮氧化剂和偏二甲肼燃料可从“自动转移飞行器”输送至“国际空间站”贮箱。在“自动转移飞行器”和“国际空间站”上,输送管路都不穿过乘员隔舱,保证乘员不会接触到有毒推进剂。
自动转移飞行器-5飞船带了一些有意思的科学试验设备,其中一个是ESA的设备触觉-1(Haptics-1),将在站上安装一个高科技手柄,航天员能用它玩简单的电子游戏。这个试验能帮助研究人员更好地了解失重如何影响人类的运动控制功能。此外,还运送了ESA的“电磁悬浮装置”,将在站上加热金属再快速冷却,研究原子在熔化和凝固的过程中如何排列和重新排列(在地球上难以研究这种基础物理)。
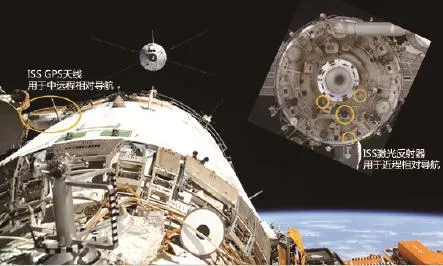
自动转移飞行器-4与“国际空间站”之间的合作目标导航示意图
6 货运飞船落幕,欧洲载人航天何以为继
早在2012年,ESA就宣布有意在自动转移飞行器-5任务后关闭“自动转移飞行器”生产线。随着“自动转移飞行器”系列接近尾声,ESA不得不在建造第6艘或开发新系统之间做出抉择,最终选择了面向未来的演进。
在完成为“国际空间站”补给的使命之后,“自动转移飞行器”将迎来第二次生命,它与众不同的“X”形太阳电池翼并不会从航天史上消失。2013年1月,ESA与NASA共同决定正式就“猎户座”多用途乘员飞行器(MPCV)展开合作研制,由ESA为NASA的“猎户座”设计和建造服务舱,仍将是ESA对“国际空间站”合作伙伴关系的实物出资偿付方式。
ESA此举是准备迎接载人航天的新挑战。这将是ESA与NASA在近地轨道以远乘员运输飞行器上的首次合作,不仅使欧洲航天工业可以继续利用“自动转移飞行器”的技术,还能极大精简NASA的研发和生产成本。同时,这个项目将在欧洲创造大量高技术就业机会,用“猎户座”发射欧洲航天员当然也是欧洲航天界乐见的事。
“猎户座”的首次飞行是2014年12月的无人探索飞行试验-1(EFT-1),飞船由德尔他-4(Delta-4)重型火箭发射,将飞到地面以上约5800km的高度,是40年来载人航天器飞得最远的一次。首航的目标是以高再入速度测试乘员舱。这一次飞船上没有航天员,并用转接器模拟服务舱的结构。
2017年,欧洲服务舱将参与完成“猎户座”飞船与“航天发射系统”(SLS)的首次组合飞行,即首次“探索任务”(EM-1),它是一次无人月球飞掠任务,飞船将以11km/s的最高再入速度返回地球大气层。
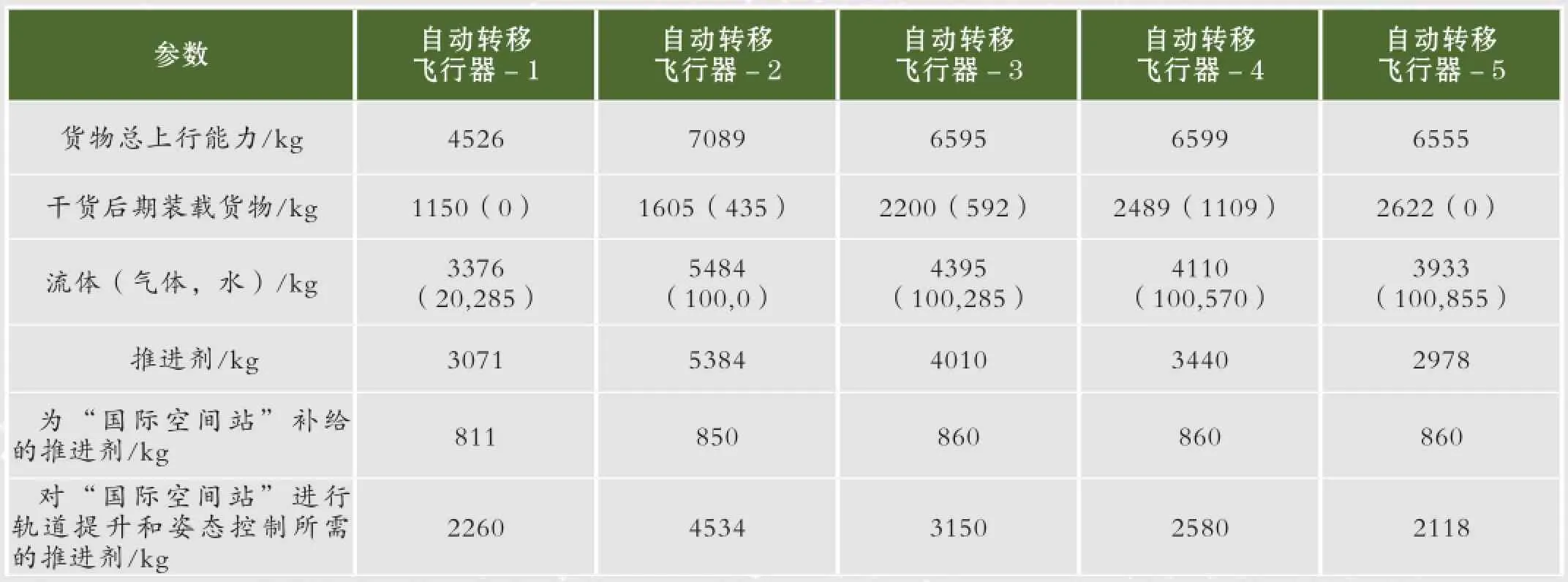
历次“自动转移飞行器”任务的货物上行能力对比

“猎户座”飞船上的欧洲服务舱结构
“猎户座”欧洲服务舱将全面沿用“自动转移飞行器”的主体设计和多年研制过程中获取的专门技术,位于乘员舱正下方,也有“自动转移飞行器”标志性的“X”形太阳电池翼。欧洲服务舱将向乘员舱提供四方面主要系统功能:推进、动力、热控和重要资源,如水和可呼吸的大气。所有这些基本功能和其他一些组件与“自动转移飞行器”上所用的相同。欧洲服务舱还存放“猎户座”轨道转移、姿态控制和高空上升中止所需的主发动机、推力器和燃料。
在欧洲航天史上,“自动转移飞行器”计划的持续时间、所分配的资源和技术复杂程度都无可匹敌。建造和运行“自动转移飞行器”得到的经验、教训已衍生出数量庞大的专有技术。“自动转移飞行器”技术可用于诸如控制空间碎片或服务其他在轨航天器等自动化任务;还可发展为无人自由飞行实验室乃至太空拖船,携带数吨补给品到达月球或火星轨道。美国公司也已从“自动转移飞行器”传承中获益,轨道科学公司建造的商业货运飞船“天鹅座”在执行“国际空间站”任务中采用了“自动转移飞行器”系统。“自动转移飞行器”的成功离不开近20年的国际合作伙伴,与不同工程文化和团队之间的密切合作是难能可贵的经验,为未来几十年里的载人空间探索联合项目奠定了基础。
郭筱曦 许国彩/文
