组合测量系统研制及在广州洲头咀管节沉放工程中的应用
2014-03-13方长远赵建虎
方长远,赵建虎
(1.中交四航局第二工程有限公司,广东 广州 510300;2.武汉大学测绘学院,湖北 武汉 430079)
广州洲头咀隧道位于广州西南部白鹅潭南端约800m处的珠江主航道上,西接荔湾区芳村花地大道,与芳村大道相交后下穿珠江,东联海珠区内环路的洪德路立交,与规划的T13路相接。工程全长约3.25 km,是连接海珠与荔湾区芳村之间的交通要塞。洲头咀隧道主线过江段将采用双向六车道,设计车速50 km/h,隧道两端为便于车辆上岸双向多设一个匝道即双向八车道。隧道主体采用沉管,水下安装沉管每节管段高9.68m、长85m、宽度31.4m,重达2.5万t,管节对接要求精度5 cm,沉放对接作业难度大,测量定位精度要求高。
洲头咀项目管节沉放对接均在水下完成,其测量与陆地上传统方法具有较大差异,再加上管节沉放,尤其是对接,要求精度较高,施工定位难度相对较大,给精确沉放和对接定位带来了挑战[1-2]。管节沉放对接虽在国内已有成功案例,但多采用单一测量塔全站仪法,缺少有效的校验方法或措施[3-4]。特别是在沉管发生倾斜时,定位误差较大;此外,传统测量数据处理采用人工准实时计算,用对讲机通报管节状态,自动化程度低,计算结果人为误差影响大,影响了管节沉放对接的精度、可靠性和效率。为此,本文针对广州洲头咀管节沉放对接的高精度、高可靠性以及自动化需要,研制了精密测量定位系统,以满足工程施工要求。
1 组合定位系统
为实现管节沉放对接测量的高精度、高可靠性及自动化,设计了由测量塔、全站仪、GPS、光纤罗经、倾斜仪、通讯系统、软件系统形成的组合定位系统。
在岸边控制点上,根据通视情况,分别架设2台全站仪;此外在另一控制点上架设GPS参考站。GPS流动台和棱镜分别固定在待沉管前、后测量塔顶上;借助极坐标法,利用全站仪测量棱镜的实时三维位置;利用RTK定位技术,实时监测流动台GPS天线位置三维位置;前后测量塔正下方、沉管内安装光纤罗经,监测管节的实时姿态;测量塔上安装倾斜仪,监测管节在水下的实时形变。
整个系统原始观测数据通过无线网络发送到指挥中心,中心计算机根据原始观测数据实施数据处理,并进行管节状态信息的实时计算和显示。每个测量塔上配置2套电台,1台用于流动站GPSRTK三维坐标的发送,另1台用于姿态传感器和倾斜仪实时姿态参数的发送;在岸上,每台测量机器上各配置1套电台,负责棱镜的实时三维定位坐标发送。监控中心配置1套电台,负责野外各发射单元观测数据的接收以及传输到计算机。
2 测量定位数据处理
1)管节坐标系定义及各特征点在管节坐标系下坐标测定
为建立管节各控制点及设备之间的相互关系和确定其在工程坐标系下的坐标,需要建立管节坐标系[5]。将沉管中心轴线对接面控制点o定义为坐标原点,沿中央纵向指向对接面方向为x轴,过原点与x轴正交定义为y轴,过原点与xoy面正交垂直向上为z轴。
完成管节坐标系定义后,采用自由设站法测定GPS天线、棱镜、管节上各控制点在管节坐标系下坐标,为后续各控制点工程坐标计算及对接参数计算服务。
2)数据预处理及质量控制
获得了原始的全站仪观测边、角信息及GPS天线位置信息后,对这些数据进行预处理和质量控制,确保点位计算正确。由于管节沉放过程缓慢,可认为短时间内测量的边、角具有相对较好的一致性,因此可借助3σ原则对其进行质量控制。RTK解则采用Kalman滤波实施质量控制。消除了异常观测后,由于RTK直接给出了GPS天线的位置,无需再做处理;而全站仪观测数据则需预处理,以给出棱镜的三维坐标(x,y,H)。式中:x0,y0,H0为控制点三维坐标;θ为方位角;δ为垂直角;D为平距,需根据斜距S计算得到。

3)归位计算
RTK和全站仪测量,尽管获得了GPS天线和棱镜中心位置,但一则由于不是对接位置,需要转换才能获得对接点坐标,无法直接用于指导作业;二则受管节姿态影响,简单的平移转换不能得到准确的对接点坐标。为此需结合姿态、各设备和控制点在管节坐标系下坐标,通过归位计算,最终获得对接点坐标。以棱镜为对象,若其理想管节坐标系下坐标为(x0,y0,z0),受姿态影响,其瞬时坐标为(x,y,z)L,结合棱镜的工程坐标系下坐标(X,Y,Z)L,则对接点P工程坐标系下坐标(X,Y,Z)L-P为:
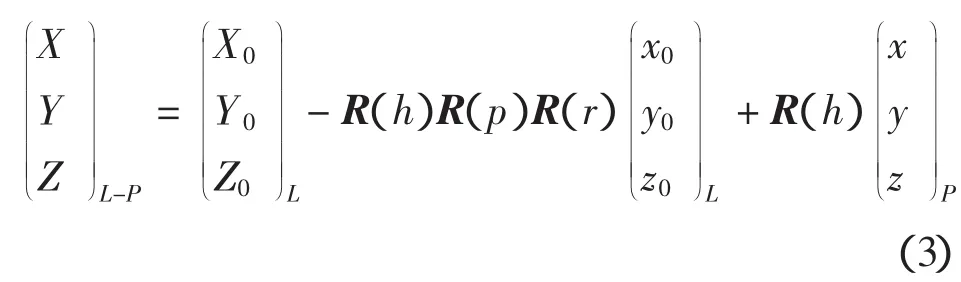
式中:p为纵滚角pitch;r为横滚角roll;R(p)为由纵滚角构成的3×3旋转矩阵;R(r)为由横滚角构成的 3×3旋转矩阵;(x,y,z)P为对接点在管节坐标系下坐标;h为管节轴向方位。
类似地,基于测量塔上RTK三维解,也可得到对接点在工程坐标系下坐标(X,Y,Z)GPS-P。
4)定位结果检校和融合
对于P点,存在源于棱镜、RTK两个定位解,为P点最终解提供了不同数据源和检核条件。P点定位信息的可靠性可借助两套定位解较差结果的统计特征来判断。
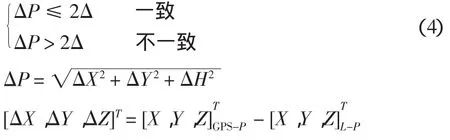
Δ为限差,可根据RTK的定位精度和全站仪定位精度综合给出。若前者定位精度为±6.0 cm,后者为±1.0 cm,则Δ为±6.1 cm。当两套定位解不一致时,则需分析异常原因,异常可根据前一个时刻正确定位解结合管节运动速度综合判断。两套定位数据一致时,则P点最终定位解可借助加权平均来获得:

式中:w为总权重;wL-P和wGPS-P分别为棱镜归位计算所得位置的权重。考虑定位精度,实际定权中wL-P和wGPS-P分别定义为0.7和0.3。
5)对接参数及对接条件判断
对接参数主要包括平移量(ΔX,ΔY,ΔZ)和旋转量 ΔA。平移量(ΔX, ΔY, ΔZ)可根据待沉管、已沉管上对应对接点P和P′的工程坐标(X,Y,H)P、(X,Y,H)P′差来计算;ΔA则可根据光纤罗经提供的待沉管实时方位A与已沉管方位(设计方位)A′差来计算。
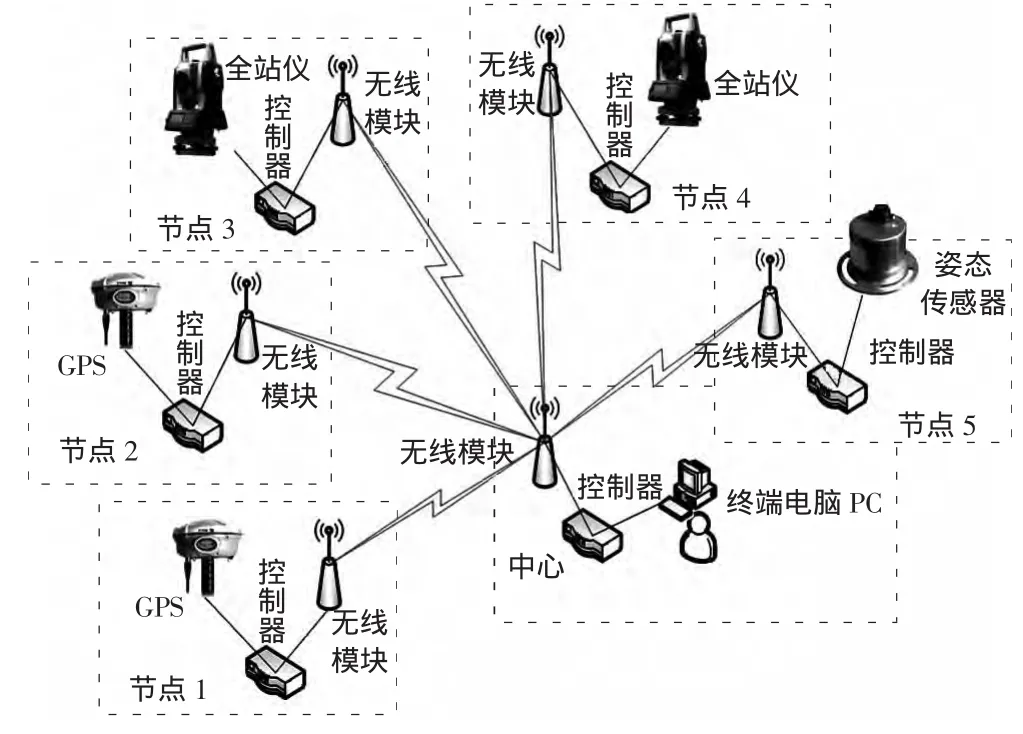
图1 无线通信系统结构图Fig.1 Wireless communication system structure

根据这两个参数指导待沉管移动,若均小于设定限差,则认为待沉管和已沉管实现很好对接。
3 通讯系统研制
为实现测量数据的自动提取,设计了由6个节点组成的无线通讯网络系统(图1)。由于系统节点相对较少,网络的拓扑结构采用星形结构。节点1~5为坐标采集节点,5个节点分别由GPS(2个)、全站仪(2个)和姿态传感器(1个)采集坐标信息传给控制器,由采集器对GGA坐标进行处理后通过无线模块发送给中心。中心节点连接操作中心,将无线模块收到的数据由控制器传输给终端电脑。
本系统无线节点分为坐标采集节点和控制中心节点。坐标采集节点主要完成观测数据的采集,并将数据返回给操作中心。控制中心节点主要完成接收各采集节点数据,并返回给操作中心,同时对各采集节点进行控制和数据处理。各节点都由4个模块构成。其中坐标采集节点由GPS/全站仪/MRU、控制器、无线模块以及电源模块构成。控制中心节点由电脑、控制器、无线模块和电源模块构成。GPS/全站仪/MRU模块负责采集各节点所在位置的坐标,控制器模块接收GPS/全站仪/MRU或无线模块传输来的数据,对数据进行处理;无线模块通过无线方式进行数据通信;电源模块为节点各模块供电;电脑为终端设备,接收控制中心采集到的GPS/全站仪/MRU信息,并通过软件将各点坐标实时表示出来。
4 软件系统研制
为满足工程对数据自动提取、存储、处理、呈现和回放等功能要求,基于软件工程,设计了沉管安装测量定位软件系统。首先开展了需求分析,认为软件需具备测量数据的存储、定位数据的处理、待沉管和已沉管当前状态的呈现以及历史回放、数据库存储各类观测数据以及信息发布的功能。在此基础上,设计了数据提取、数据预处理、数据融合及定位结果计算和输出、动态图示、文本信息显示、提示及预警机制、数据管理和回放、数据发布和帮助9个功能模块。软件框架如图2所示。
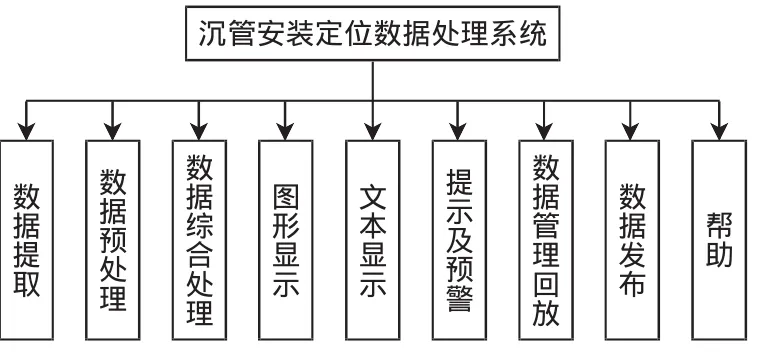
图2 软件系统综合设计框图Fig.2 Integrated design of the software system
软件采用C++语言编写,在Microsoft Windows XP操作系统中用Visual Studio 2008开发环境设计开发,共有7个功能区,包括菜单区、工具条区、实时监控显示区、实时沉管位置姿态显示区、主要角点位置信息显示区、可编辑信息显示区、实时数据设备状态显示区。
5 现场应用及效果分析
为实时监测管节沉放过程,精确安置管节于指定位置,在每个管节上安装与水深相适应高度的观测塔,为使沉管平衡并使观测塔间距尽量大,在沉管的两端分别安装观测塔A和B,并在各观测塔上分别固定1个棱镜和1台GPS,在其中1个观测塔上安置倾斜仪。测量塔及棱镜、GPS天线如图3所示。
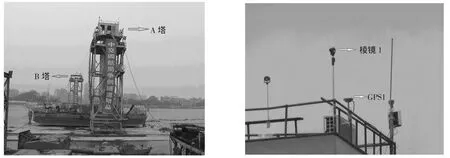
图3 测量塔及棱镜、GPS天线Fig.3 Measuring tower,prism and GPS antenna
沉放过程中,无线电台实时接收不同位置的棱镜坐标、GPS天线坐标、姿态参数、方位参数以及倾斜仪参数,并借助研制的软件系统实时计算对接点坐标、呈现管节的实时状态,并通知指挥人员实时调整管节沉放作业。图4软件给出了管节实时位置和状态参数以及与已沉管间关系。
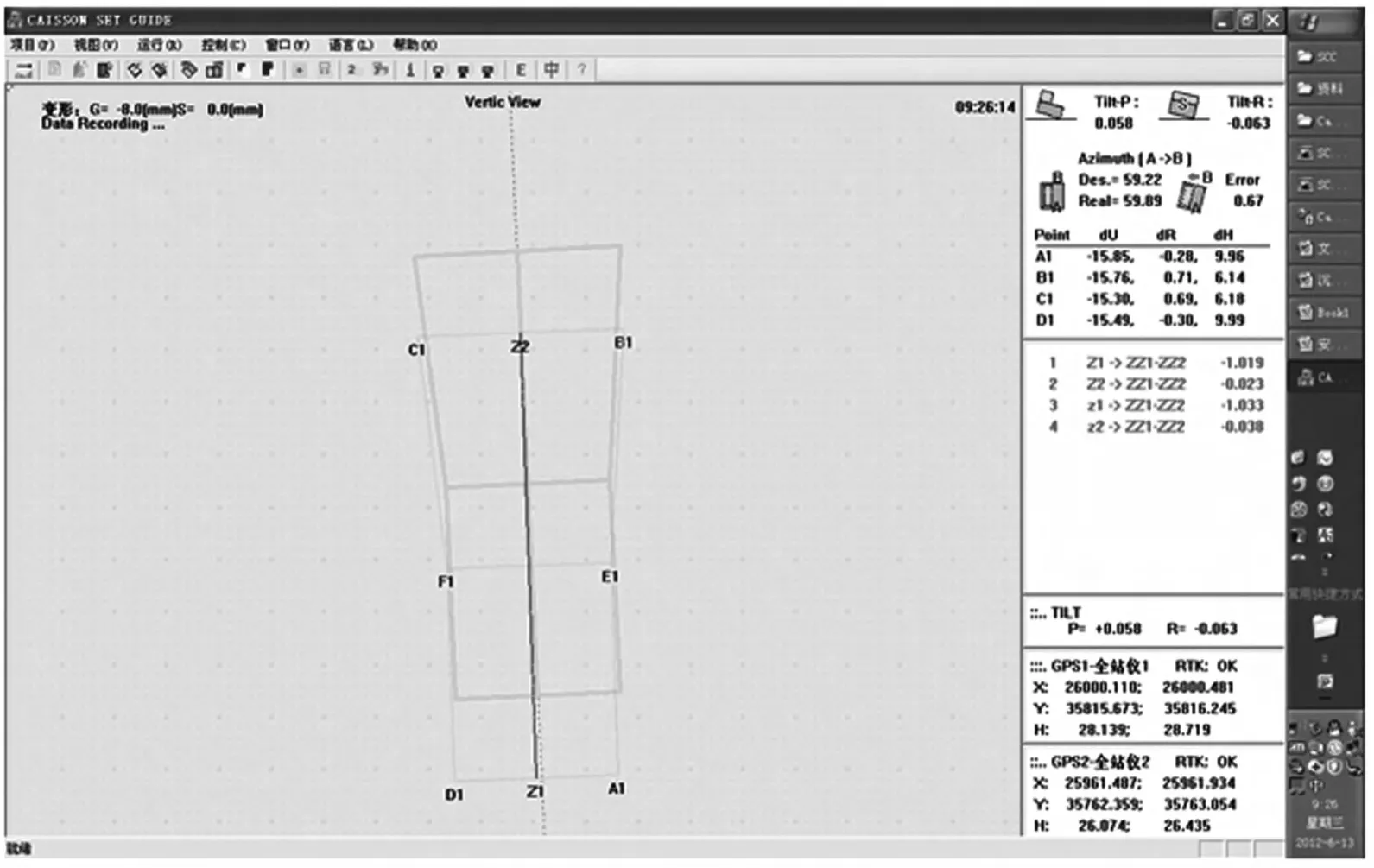
图4 软件实时监控界面Fig.4 Software real-time monitoring interface
根据记录的测量塔上GPS和棱镜观测数据,图5给出了管节沉放和对接全轨迹。
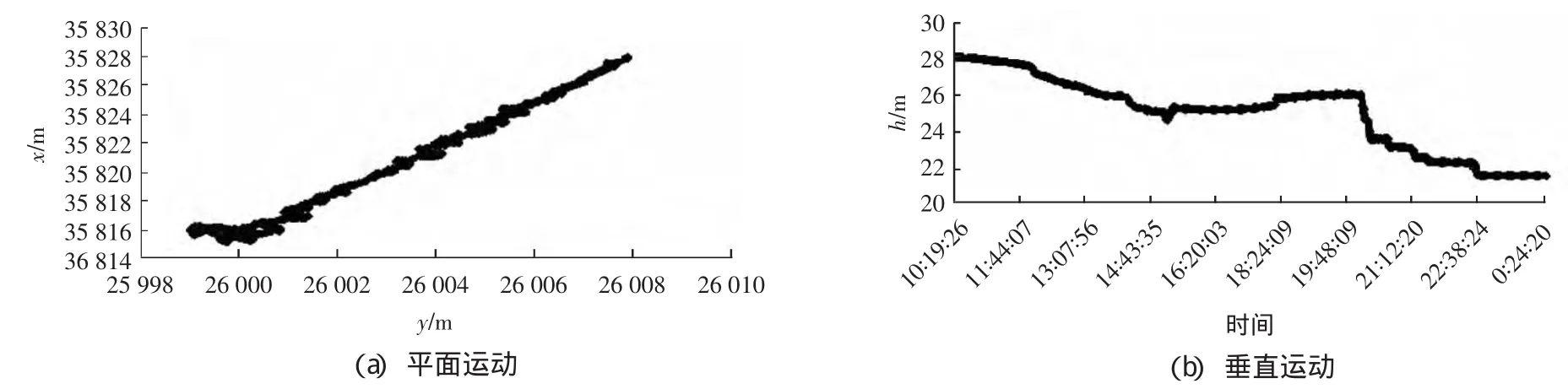
图5 A塔GPS1平面和垂直运动变化过程曲线Fig.5 Change process curve of planar motion and vertical motion of GPS1 in Tower A
从以上过程曲线可以看出,在整个监测过程中,RTK定位连续,除个别数据异常外,其他观测数据均正常。全站仪定位精度较高,但由于中间吊车的晃动、移位,出现了部分异常或者中断,但仍可正确呈现管节在不同时刻平面和垂直方向的实际运动。
结合上述观测数据、各设备在管节坐标系下的坐标以及坐标转换关系,分别计算得到了用于对接的管节上4个对接点坐标,并将之与设计坐标比较。
对各控制点时序定位数据滤波,消除了原始观测数据中的异常,最终成果正确地反映了不同时期管节4个角点位置的变化。利用管节对接后4个角点实时定位坐标与设计坐标的偏移量、贯通测量成果,最终给出了组合系统定位精度(表1)。
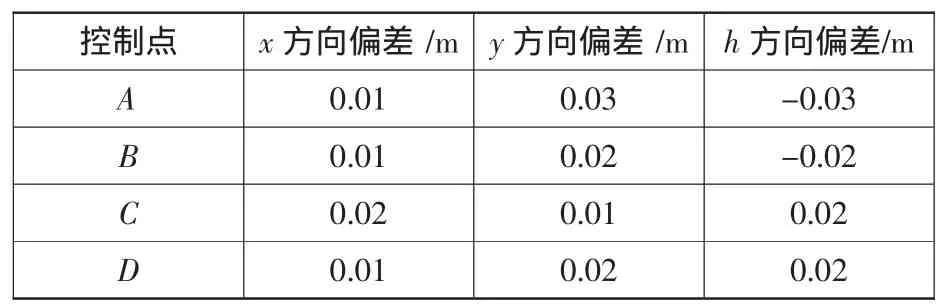
表1 测量定位精度Table 1 Measurement precision
可以看出,最终的对接定位精度平面最大为3.0 cm,最小为1.0 cm;垂直方向最大偏差为3.0 cm,最小为2.0 cm。表明研究给出的数据处理方法正确,软件系统运行稳定。
6 结语
广州洲头咀项目实际应用效果表明,研制的精密组合测量定位系统、通讯系统和软件系统运行稳定可靠,研究给出的数据综合处理方法正确,满足了洲头咀沉管隧道施工的精度要求,很好地服务了工程实施。研究成果对类似工程应用具有借鉴作用。
[1] 常翔,张献伟.生物岛—大学城沉管隧道工程重难点浅析[C]//中国中铁隧道集团2007年水底隧道专题技术交流大会论文集.北京:中国铁道学会,2007:57-61.CHANG Xiang,ZHANG Xian-wei.Analysis on the key and difficult points of Shengwudao-Daxuecheng immersed tunnel project[C]//Technical communication conference proceedings of the underwater tunnel project of China Railway Tunnel Group in 2007.Beijing:China Railway Society,2007:57-61.
[2] 李全海,何青.海底沉管隧道安放测量[J].海洋测绘,2004,24(6):34-36.LI Quan-hai,HE Qing.Measurement for submerged tubes to be joined together undersea[J].Hydrographic surveying and charting,2004,24(6):34-36.
[3] 丁美,潘永仁.沉管隧道测量技术[J].现代隧道技术,2005,42(1):11-15.DING Mei,PAN Yong-ren.Surveying techniques for an immersed tube tunnel[J].Modern Tunneling Technology,2005,42(1):11-15.
[4] 杜云龙,刘千伟,王解先.常洪隧道管段浮运沉放测量及定位实时监控[C]//2003年上海国际隧道工程研讨会论文集.上海:中国土木工程学会,2003:433-442.DU Yun-long,LIU Qian-wei,WANG Jie-xian.Measuring and real-time positioning monitoring for float and immersion of pipes in Changhong tunnel[C]//Proceedings of Shanghai international tunnel engineering conference.Shanghai:China Civil Engineering Society,2003:433-442.
[5] 丁美.沉管隧道测量与实时定位技术[J].测绘通报,2009(S0):36.DING Mei.Measurement and real-time positioning technology for immersed tunnels[J].Bulletin of Surveying and Mapping,2009(S0):36.