GPS海上定位技术在预制墩台吊装精调中应用
2014-03-13易建华姬翠翠黄文学杨银波
易建华,姬翠翠,黄文学,杨银波
(中交二航局二公司测绘大队,重庆 400042)
0 引言
港珠澳大桥横跨30余km的海域,从珠海到香港整个路段包括海底隧道和桥梁,由于海上受风浪较大,对海上工程测量的定位和精度调节造成严重影响,加大了工作难度,所以此文对港珠澳大桥埋置式承台墩身在海上定位和精调的过程进行了总结,并对建设中发现的问题提出了可行性的建议,便于此项技术在海上施工测量的推广[1]。
1 工程概况
港珠澳大桥足尺模型工艺试验墩数量1个,工艺试验墩中心桩号为K22+853m,向北偏离桥轴线150m。
预制承台的几何尺寸为10.6m×10.1m×4.5m,预制墩身尺寸为5.0m×3.5m×13.4m,其结构及几何尺寸见图1。
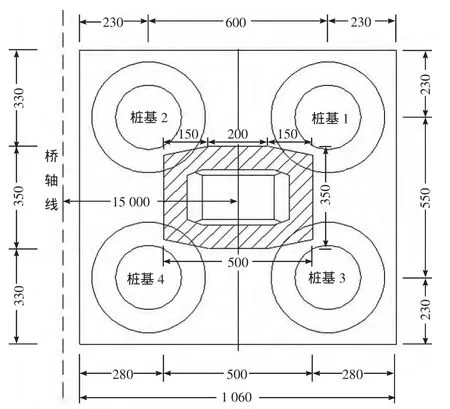
图1 墩台结构图(单位:cm)Fig.1 structure of the pier(cm)
2 仪器设备、坐标系统及高程基准
项目投入的主要仪器设备有精密全站仪1台,经纬仪2台,Leica NA2水准仪1台,天宝R6 GPS接收机3台。
测量定位采用港珠澳大桥统一的测量基准。平面基准采用港珠澳大桥测控中心建立的桥梁工程坐标系,高程基准采用1985国家高程基准。
预制墩台吊装测量控制网统一采用测控中心提供的HZMB-CORS系统[2]和首级控制点坐标成果表,使用海上施工GNSS定位系统,进行RTK实时定位时采用测控中心提供的坐标转换七参数[3]。
3 预制墩台海上定位方法及精调
3.1 预制墩台吊装概述
墩台用驳船运至现场后在墩旁抛锚定位,用2200 t浮吊起吊安装。墩台起吊至钢管桩上方后进行粗导向定位,以确保钢管桩顺利穿入承台预留孔。粗导向定位完成后,缓慢下放墩台,直至吊具及悬挂系统搁置在桩顶的支撑桩帽上,待悬挂系统的竖向千斤顶受力均匀后,浮吊落钩完成墩台粗安装。利用悬挂系统的水平油缸组、竖向油缸组及预留孔内的水平油缸组精确调整,直至墩台准确安装就位。预制墩台精调流程见图2。

图2 墩台精确调位流程图Fig.2 Flow chart of the accurate adjustment and positioning of piers
预制墩台吊装过程精确调位方法为:墩台精确调位通过各调整油缸组来完成,其中竖向调整、X向调整、Y向调整和墩台顶紧油缸组用于精确调位。各油缸组的每个油缸均可独立控制伸缩的位移和载荷,实现精确调整。
3.2 桩基复核
预制承台、墩身吊装前,对基桩平面位置及相对平面位置利用全站仪三维坐标法进行复核和桩顶高程及桩身倾斜度等进行复核测量,确定群桩空间姿态,推算桩基标高+6~-9.9m处桩基的偏位情况,为预制承台、墩身吊装提供数据支持。
3.3 预制墩台精调控制点布置
通过在墩顶安装的吊具系统上布置测量控制点来实现预制墩台的安装定位及精调。根据预制墩台与吊具系统的相对几何尺寸关系,在吊具上布置4个测量调位点,4个高程调位点,并用油漆做好标记。注意测量调位点的保护工作,吊具上精调点布置如图3所示。

图3 吊具上精调点布置图Fig.3 layout of the accurate adjustment points of the lifting sling
3.4 预制墩台吊装粗定向
预制墩台吊装下放时,由于预制墩台处于悬吊状态,无法对其进行GPS-RTK测量,故预制墩台吊装下放过程,只能通过人为观察和调整预制墩台上的揽绳来指导预制墩台的下放。缓慢下放墩台,直至吊具及悬挂系统搁置在桩顶的支撑桩帽上,待悬挂系统的竖向千斤顶受力均匀后,浮吊落钩完成墩台的粗定向。
3.5 预制墩台精调
预制墩台粗安装完成后,下步工作即预制墩台的精调,按调整顺序主要包括垂直度、墩顶标高、平面位置3部分的精调工作。
3.5.1 预制墩台垂直度精调
由于受钢围堰及吊具系统遮挡的原因,利用经纬仪竖丝法调整墩身垂直度受限,故只能采用悬吊垂球的方法测量墩身垂直度,多次测量取平均作为墩身的垂直度,根据量测的墩身垂直度,指导吊具系统及承台预留孔内预装的自动液压千斤顶来对墩身垂直度进行调整,反复测量及调整,直至墩身垂直度满足设计要求为止。
3.5.2 预制墩台高程精调
由于预制墩身顶已被吊具系统覆盖,无法直接在墩顶架设水准仪精调,故只能通过对在吊具系统顶面上预先布置的高程调位点的精调来实现预制墩身高程的精调,具体方法为:
首先在吊具系统上架设GPS接收机,利用GPS-RTK测量方法,测定一点的高程,测量时长15min[4-5],得到一个高程基准点,然后架设徕卡NA2水准仪,测量吊具4个角点(高程调位点)与已知高程点的高差,计算得到吊具四角高程,通过吊具系统的竖向液压千斤顶来调整预制墩身的高程,重复以上过程,反复测量,多次精调直至预制墩身顶标高达到设计高程为止。
3.5.3 预制墩台平面精调
预制墩台的平面精调也是通过吊具系统上预先布置的调位点的精调来实现的,根据预制墩台与吊具系统的相对尺寸关系,计算出吊具系统上平面调位点的坐标。
在吊具顶面上的调位点上同时架设3台GPS接收机,对调位点的坐标进行实时测量,根据GPS接收机实时测量得到的坐标值,与吊具系统上布置的精调点的设计坐标进行比较,得到预制墩台的平面偏位及平面扭角,指导液压调位系统对预制墩台进行调整,反复测量与精调,根据不在同一直线上的3点确定一个平面的原理,当3台GPS接收机的坐标都达到设计坐标时,即表示预制墩台平面调位完成[6]。
4 预制墩台复核测量
预制墩台体系转换完成、吊具系统拆除后,在墩顶面上已经布置好的轴线点上架设GPS接收机,利用GPS-RTK测量方法,测定预制墩身轴线点的坐标,测量时长15min,并利用徕卡NA2水准仪测量墩顶四角高程。利用悬吊垂球法测量墩身垂直度。得到预制墩台吊装定位及精调的最终成果。采用GPS-RTK测量模式进行精调,故其定位精度为平面±2 cm,高程±3 cm[7]。
预制墩台吊装完成竣工测量示意图见图4,预制墩台吊装定位竣工测量成果见表1,预制墩台吊装墩顶四角高程竣工测量成果见表2,预制墩台吊装完成垂直度竣工测量成果见表3。
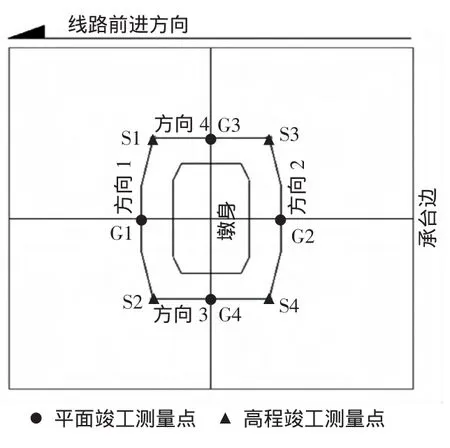
图4 预制墩台竣工测量示意图Fig.4 Sketch of the final survey of the precast pier

表1 预制墩台吊装定位竣工测量成果表Table 1 Completion measurement results of the lifting and positioning of precast pier m
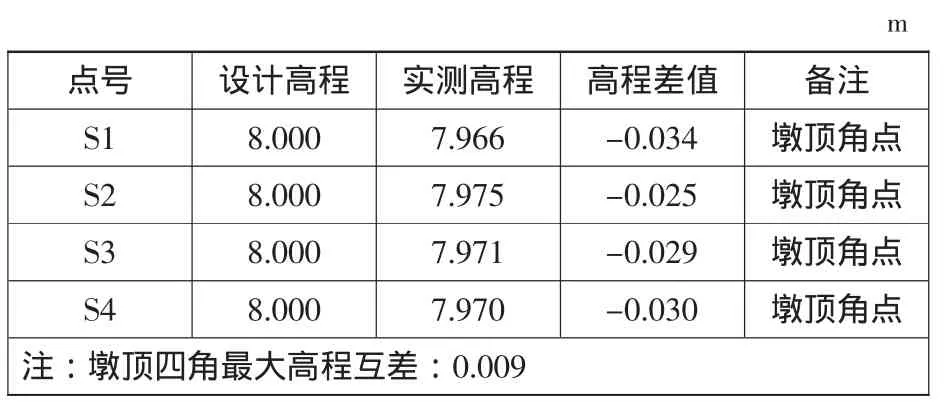
表2 预制墩台吊装墩顶四角高程竣工测量成果Table 2 Completion measurement results of the four corners elevation on the top of the lifting precast pier
5 结语
通过预制墩台吊装定位及精调测量整个过程,即证明了此项技术的可行性,也发现一些不足之处,主要体现在以下方面并给出建议。
1)在预制墩台下放到位后,由于受钢围堰及吊具系统的遮挡,墩身垂直度的监测较难实现。目前暂只能采用悬挂垂球的方法进行。
建议在预制墩身上设计测量通道和挂篮,方便垂直度测量。主体工程上墩身安装时,建议在墩身上预先安装反射片,利用全站仪三维坐标法测量其垂直度。
2)在预制墩台精调过程中发现,液压调位系统对墩台的平面扭角的调整能力不强,耗费大量时间及精力。
建议对液压调位系统进行设计改进。以适应平面扭角的调整。
3)吊具系统上部空间狭小且布置的机具较多,不利于测量精调时测量仪器设备的布置,对测量精调带来不便。
建议对吊具系统进行改进,预留出足够的测量空间。
4)由于吊具系统将预制墩身顶部遮盖,无法直接测量墩身顶部轴线的平面偏位及高程,只能以吊具系统的轴线偏位和高程来代替进行精调。
建议每次海上吊装前,应在陆地上将吊具系统安装就位,利用预制场建立的以平行墩身纵横轴线为基础的独立测量控制网,将预制墩台的轴线及高程精调点引测至吊具系统顶部,根据坐标系统之间的关系进行坐标转换,将独立坐标转换至桥梁工程坐标,再进行海上安装精调,防止由于吊具安装误差给预制墩台的最终定位精度带来影响。且陆地导向架安装难度远小于海上导向架安装。
5)预制墩台精调过程中发现,在海浪冲击力作用下,预制墩台及钢管桩存在晃动情况,预制墩台与钢管桩的相对晃动位移在4 cm左右,给预制墩台精调定位带来不确定性。
建议采取工程措施进行加固。
6)承台墩身预制时,承台轴线与墩身轴线及承台预留孔与墩身轴线相对应的几何尺寸关系要尽量与设计一致,防止墩台精调到位后,预留孔与钢管桩壁的间隙不均,对下步止水工作带来难度。
建议在预制场建立精密的独立控制网及测量塔,严格施测与数据平差,以保证预制精度要求。
7)由于目前施工现场缺少测量基准点,在预制墩台精调时采用的方法为GPS-RTK的测量方法,其测量精度难以实现预制墩身安装轴线偏位±1 cm,高程不符值±1 cm的定位精度要求[5]。故不建议主体工程时采用GPS-RTK测量方法进行预制墩台安装的精调工作。
建议在主体工程施工时,利用已经建设好的测量平台和优先墩上布设的测量控制网点,利用全站仪三维坐标法对预制墩台安装进行精调,以保证墩台安装的绝对定位精度。优先墩的定位控制采用测量平台上的测量控制定位进行精调,故应注意优先墩的施工顺序[8]。
8)通过对预制墩台安装的测量控制发现,海上施工预制墩台安装定位轴线偏差±1 cm较难实现,且耗费大量人力物力及时间。
建议预制墩台安装定位轴线偏差适当放宽,通过垫石现浇或增大垫石预留孔内径的方法进行绝对定位的修正,以保证港珠澳大桥的整体线型。
[1] 仇正中,吴启和,牛照.港珠澳大桥埋置式承台基坑冲淤试验研究[J].中国港湾建设,2013(1):25-28.QIU Zheng-zhong,WU Qi-he,NIU Zhao.Experimental study on scouring and siltation in foundation excacation for embedded capping blocks for Hong Kong-Zhuhai-Macao Bridge[J].China Harbour Engineering,2013(1):25-28.
[2] 王春林,高飞,李书群.单基站CORS在电力线路测量中的应用[J].测绘工程,2012,21(6):82-85.WANG Chun-lin,GAO Fei,LI Shu-qun.Application of single base station CORS to the electricity line measurement[J].Engineering of Surveying and Mapping,2012,21(6):82-85.
[3] 熊金海,熊伟,吴迪军.港珠澳大桥GNSS连续运行参考站系统的建设及应用[J].工程勘察,2013(2):75-78.XIONG Jin-hai,XIONG Wei,WU Di-jun.Construction and application of CORS for Hong Kong-Zhuhai-Macao Bridge[J].Geotechnical Investigation&Surveying,2013(2):75-78.
[4] 于先文,王继刚,范一中.GPS数据处理中工程投影面的再选取问题[J].测绘工程,2002,11(3):29-30.YU Xian-wen,WANG Ji-gang,FAN Yi-zhong.On the re-selection of the compensating projective plane in data processing of GPS surveying[J].Engineering of Surveying and Mapping,2002,11(3):29-30.
[5] GB/T 18314—2009,全球定位系统(GPS)测量规范[S].GB/T 18314—2009,Specification for global positioning system(GPS)surveys[S].
[6] 段举举,沈云中.GPS/GLONASS组合静态相位相对定位算法[J].测绘学报,2012,41(6):825-830.DUAN Ju-ju,SHEN Yun-zhong.An algorithm of combined GPS/GLONASS static relative positioning[J].Acta Geodaetica et Cartographica Sinica,2012,41(6):825-830.
[7] GB 50026—2007,工程测量规范[S].GB 50026—2007,Code for engineering surveying[S].
[8] 赵俊生,徐卫明.GPS在城市控制测量应用中的研究[J].测绘通报,2000(9):8-9.ZHAO Jun-sheng,XU Wei-ming.Study of application of GPS to urban control survey[J].Bulletin of Surveying and Mapping,2000(9):8-9.