全液压推土机速度控制系统的研究
2014-03-09刘存波郭浩鹏满敬华田从丰
刘存波,郭浩鹏,满敬华,田从丰
(山推工程机械股份有限公司,山东济宁 272073)
全液压推土机速度控制系统的研究
刘存波,郭浩鹏,满敬华,田从丰
(山推工程机械股份有限公司,山东济宁 272073)
分析静液压传动的原理,提出速度控制方法和控制策略,开发出全液压推土机的控制系统,进行了台架和实车实验。实验结果表明:提出的速度控制方法能有效地保证推土机的微动性能,且操纵简单,系统响应快,极大地降低了劳动强度。
推土机;全液压传动;速度控制;微动控制
目前,国外智能化全液压推土机技术已较成熟,同国内相比其价格为国内同等马力液力式推土机的2~3倍,并且国外的推土机静压传动理论和控制技术处于保密状态。作为智能推土机研制的核心环节,行驶控制系统更为国外所垄断。而我国在作为推土机智能化基础的液压传动方面的研究刚刚起步,理论研究非常薄弱。国内个别厂家生产的全液压推土机,由于缺乏理论支持,液压系统的参数匹配和整机牵引性能远远不能满足推土机作业的要求,其动力性和经济性与国外差距也比较大。为此,进行静压推土机液压系统控制策略和操纵方法的研究,开展全液压推土机传动系统的动力匹配,解决目前国内在全液压推土机行驶驱动方面的理论问题具有积极的意义。
1 全液压推土机传动原理
推土机的静液压传动系统控制着推土机的行驶功能,是推土机动力性能的核心系统。推土机的静压行驶驱动系统主要由变量泵、变量马达、补油泵、溢流阀等组成,电液比例控制静液压推土机行驶驱动系统单边回路如图1所示。
如图1所示,发动机带动变量泵1,其输出的压力油经变量马达2将液压能转回到机械能,经减速装置传递给推土机的链轮。在静压传动行驶系统单边回路中,变量泵1是系统液压能的能源也是系统的控制组件,通过调节液压泵的排量就可实现对系统流量的控制,而且改变泵的转动方向就可使液压马达的方向跟着改变,实现对马达转动方向的控制。通过调整马达排量控制系统压力,使液压系统保持稳定。
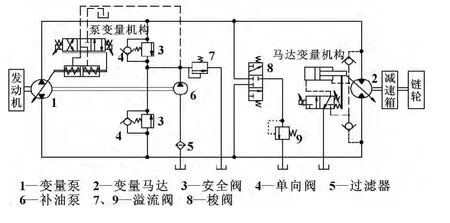
图1 电液比例控制静液压推土机行驶驱动系统单边回路
2 速度控制系统及控制策略
推土机的行走系统及以PLC为主控制器的智能控制系统共同组成了推土机行驶驱动系统。系统主要单元有:发动机、分动箱、电液比例阀控制双泵和双马达行驶驱动系统液压回路、PLC控制系统、行走速度手柄等,如图2所示。

图2 全液压操纵系统
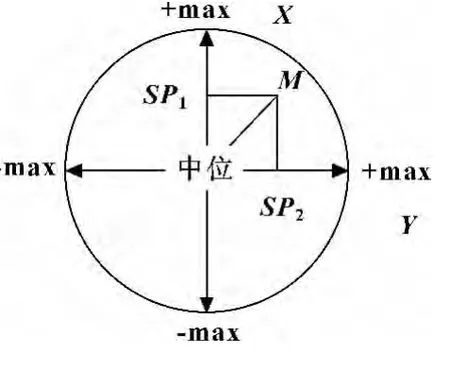
图3 速度控制手柄方向状态图
速度控制系统中,速度手柄将推土机的行驶方向控制分为8个方向状态及一个停车状态,十字型手柄由纵、横2个电位计构成,如图3所示,直线行走:手柄X方向,左右变量泵和左右变量马达根据手柄X方向值等量输出;并根据左右履带马达转速信号调整两变量泵的排量大小,从而达到直线自动纠偏;以及根据载荷的变化情况同等调整两变量泵或马达的排量。前进转弯:手柄斜向上,左变量泵与右变量泵的输出与手柄X方向值和手柄Y方向值有关,手柄X方向值越大,则手柄Y方向值越小,转弯半径越大,速度越快;反之,手柄X方向值越小,则手柄Y方向值越大,转弯半径越小,速度越慢;以及根据载荷的变化情况同等调整两变量泵的排量大小。后退转弯:手柄斜向下。原地转向:手柄Y方向,左变量泵根据手柄Y方向值输出;右变量泵根据手柄Y方向值输出;以及根据载荷的变化情况同等调整两变量泵的排量大小。
速度控制系统通过采集靠近驱动马达液压系统油压 (由于路面阻力通过驱动轮传递到驱动马达上),求出马达两端额定压差,如公式(1)所示:

其中:ΔpmH为液压马达两端额定压差;
ηmt为液压马达的机械效率;
qmmax为液压马达流量;
Mm为地面阻力传递液压马达扭矩。
则根据能量算法,液压马达传递功率如下式所示:

式中:V为液压马达排量;
n为液压马达转速;
Pm为泵功率。
发动机功率如式(3)所示:

式中:P为发动机输出功率;
η为传动系统总效率。通过采集到的方向手柄角度信号,计算达到要求的速度信号;地面阻力通过链轮和减速机传递到液压传动系统,转换成压力信号。采集到的压力信号通过公式(1)计算得出地面阻力,通过公式(2)、(3)计算得出发动机在该车速下所要求输出功率,推土机ECU根据发动机匹配功率控制曲线输出发动机控制信号,同时根据公式(1)、(2)和泵和马达本身性能曲线,匹配计算出泵和马达高效排量和匹配的静液压传动系统压力,输出泵马达排量信号并进行调节,从而完成泵马达和发动机的整车速度控制调节,形成的控制流程图如图4所示。
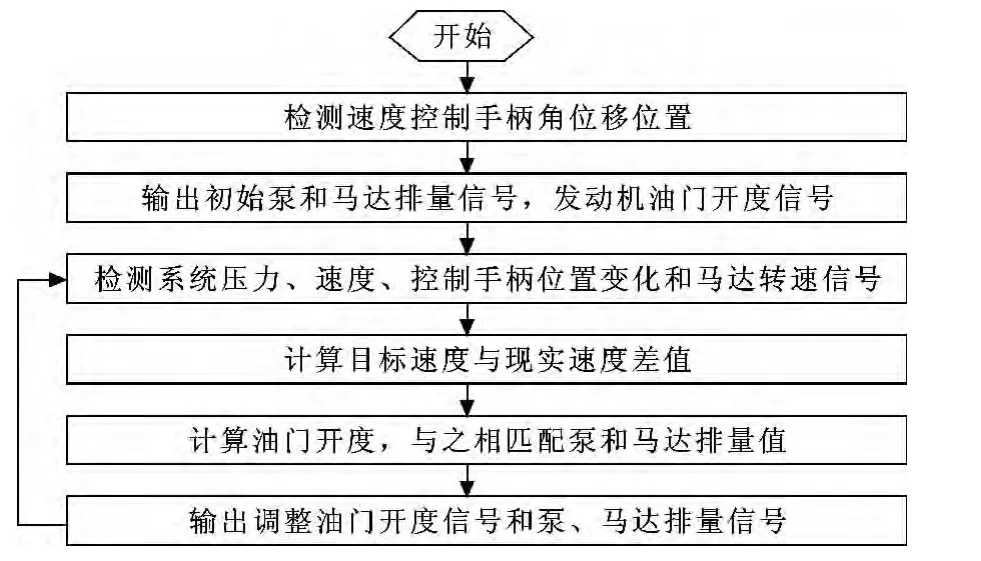
图4 速度控制流程图
静液压推土机控制器软件编程至关重要。控制器和显示器的程序全部是在CoDesys环境下完成的,控制系统的开发和完善是一个循序渐进的过程,为了便于对程序进行修改和完善,系统的软件设计采用模块化的设计方法,将控制程序主要分为速度手柄控制、自动油门控制、行走纠偏、转向控制和制动控制等模块。采用一个主控制器 (TTC200控制器),根据采集到的各种电位信号、开关量、传感器信号和发动机信号等做出判断,向比例阀、开关阀、报警灯和发动机等输出各种控制信号,达到控制发动机的目的。
3 速度控制台架及实车实验
为了对控制策略和控制程序进行验证,进行了台架实验和实车实验。试验系统的组成:液压泵 (闭式)实验系统、液压马达加载系统以及实验操作平台等,如图5所示。

图5 静压传动系统实验台
进行空载转向试验,绘制左右马达转速图如图6所示。
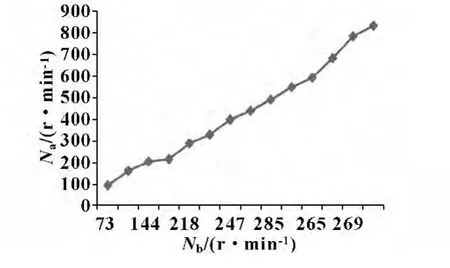
图6 空载马达a和马达b速度
转向过程中速度控制手柄前右倾a马达转速增加速度比b马达增加速度快,转速分别为831和261 r/min,转速比为3.2,实现转弯。
恒速加载实验模拟推土机在工作过程中集土工况下的性能。在泵转速为1 200 r/min恒定转速下,对马达加载,得到的A、B两个实验台分别对应马达a和b的实验数据,并绘制了马达扭矩-马达排量和马达转速-马达扭矩变化图,如图7和8所示。

图7 马达排量-马达扭矩图
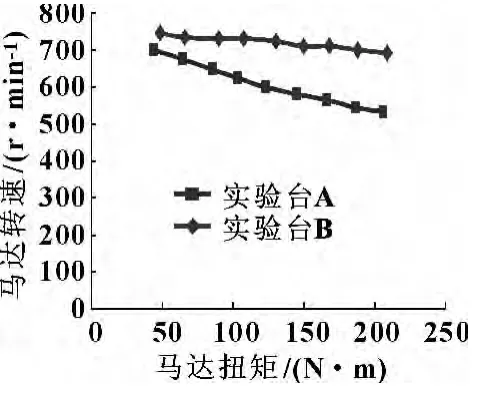
图8 马达转速-马达扭矩图
从图7可看出:实验台A的马达排量和马达B的马达排量随马达扭矩呈平缓变化。载荷范围内,对于马达载荷的增加,控制系统分别采用了两种控制方式来稳定发动机转速:当泵的排量在50 mL/r的情况下,通过单独减少泵的排量来适应载荷变化;当泵的排量超过50 mL/r,控制系统维持泵的排量,增加马达的排量达到稳定泵转速的目的。
实验台A、B的马达转速都随马达扭矩的变化呈线性降低趋势,静压传动系统中通过降低变量泵排量或者增加变量马达的排量都能稳定变量泵的扭矩,从而稳定发动机转速。实验证明,此控制系统在恒速加载的情况下能达到良好的控制效果。
变速恒载100 N·m,如图9所示,主要模拟推土机在搬运中量土方过程中的加速性能。泵转速基本恒定为1 200 r/min,通过改变泵排量改变马达转速。
变速恒载150 N·m,如图10所示,主要模拟推土机在搬运较大土方过程中的加速性能。泵转速为1 000~1 350 r/min,通过改变泵排量改变马达转速。

图9 变速恒载100 N·m排量-转速图

图10 变速恒载150 N·m排量-转速图
全液压推土机行驶驱动系统中发动机转速不变的情况下,通过增大变量泵的排量与减少变量马达排量都能使变量马达速度增加,控制系统在此情况下能通过改变泵与马达的排量来达到马达加速的目的,能更好地稳定发动机,实现推土机车速的稳定增长。
4 结论
针对推土机产品的应用实践性特点,文中进行了大量的实验,主要通过实验验证的方式对提出的全新静液压的速度控制策略进行了研究。实验结果表明:速度控制方法能有效保证推土机的微动性能,且操纵简单,系统响应快,极大地降低了劳动强度。
【1】郭俊.全液压推土机行驶静压驱动系统研究[D].西安:长安大学,2003.
【2】易小刚.全液压推土机液压与控制系统研究[D].西安:长安大学,2004.
【3】朱学超.小功率全液压推土机行驶驱动系统研究[D].西安:长安大学,2009.
【4】姜友山,邹广德.全液压推土机滑转率研究[J].山东理工大学学报:自然科学版,2010,22(1):75-77.
Research on the Speed Control System of Full Hydraulic Bulldozer
LIU Cunbo,GUO Haopeng,MAN Jinghua,TIAN Congfeng
(Shantui Construction Machinery Co.,Ltd.,Jining Shandong 272073,China)
The principle of fully hydraulic drive was analyzed.The speed control method was proposed.The control system and control strategy were developed.The rig test of vehicles and the bulldozer test were done.The experimental results show that the speed control method can effectively guarantee the micro performance of the bulldozer,the control system is simple and fast,it can greatly reduce the labor intensity.
Bulldozer;Full hydraulic transmission;Speed control;Inching control
TH137.1
A
1001-3881(2014)8-084-3
10.3969/j.issn.1001-3881.2014.08.028
2013-04-12
刘存波 (1982—),男,硕士,研究方向为工程机械。E-mail:liumt2011@163.com。