一种基于无线传感网络的电容式静力水准仪研制
2014-03-08蔡立艮周春华戎晓力
蔡立艮,周春华,戎晓力,卢 浩
(1.中国人民解放军理工大学 国防工程学院,南京 210007;2.中国人民解放军理工大学 野战工程学院,南京 210007)
静力水准仪是用于测量各个测点的相对沉降的精密仪器,主要用于大型建筑物如水电站厂、大坝、高层建筑物、核电站、水利枢纽工程岩体等各测点不均匀沉降的测量。地铁等城市地下工程施工往往下穿既有建筑、地铁隧道或天然气、自来水管线等,对施工引起的不均匀沉降有严格的控制要求,因此也逐渐引入静力水准测量方法[1]。
静力水准仪的传感部分实际上测量的是垂直位移量,因此各类长期稳定性好、测量精度满足要求的位移测量手段均可用于静力水准仪。目前常用的静力水准仪有CCD、差动变压器(LVDT)、超声波和磁致伸缩等原理类型[2-4]。
与核电站、大坝等长达数年的长期沉降健康监测相比,城市地下工程施工期沉降监测周期通常仅为数月,因此本文提出一种低功耗的电容式静力水准仪测量方案,该静力水准仪采用电池供电和无线数据传输,安装时无需布线,且在整个监测周期内不需要更换电池,节省了施工工作量和成本,同时也提高了系统的可靠性。
1 静力水准仪工作原理
静力水准仪的测量原理如图1所示[5],相连的2个容器1与2(实际工程中,一般为多个容器,其中一个作为基准)分别安装在待测平面A、B上,当连接两容器中的介质是均匀液体(即同类并具有同样参数)时,液体的自由表面处于同一水平。它们的高差Δh为

式中:H1、H2为容器内液面相对于工作底面的高度;a1、a2为容器的高度或读数零点相对于工作底面的位置;b1、b2为容器中液面位置的读数值,即读数零点至液面的距离。对于一般工程测量,如果忽略仪器的制造误差,则 a1=a2,式(1)就变为

2个平面的高差仅仅取决于容器的液位高度,测得液位高度就可以获得高差。根据这一原理,可将平面的沉降问题,用测量液位的方法解决。
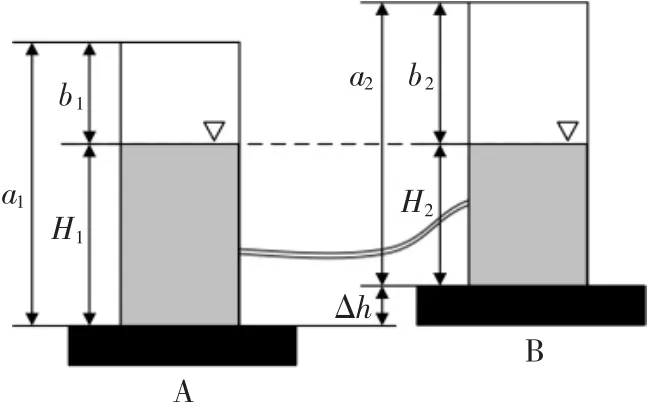
图1 静力水准仪测量原理图Fig.1 Measurement schematic diagram of hydrostatic eveling
2 系统组成
静力水准测试系统主要由无线静力水准仪、数据采集记录仪及其室外天线和数据采集服务器组成,系统网络拓扑图如图2所示。
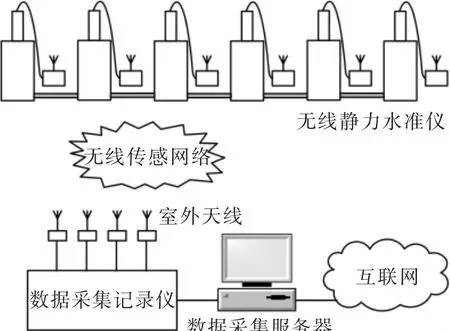
图2 静力水准测试系统图Fig.2 Test system diagram of hydrostatic leveling
无线静力水准仪的水准测量采用电容式位移计,数据通信采用ZigBee无线传感网络。由于采用低功耗设计技术,无线静力水准仪由电池供电,因此仅需要在静力水准仪间安装连通管,而不需要布设供电与通信电缆,与传统静力水准仪相比,节省了施工费用,提高了可靠性。
室外天线与静力水准仪进行无线通信,下发控制参数和回收测试数据。室外天线与数据采集记录仪之间通过RS485总线进行通信,当静力水准仪布设在地下工程隧道内时,天线可沿隧道串行布设。
数据采集记录仪通过室外天线和无线静力水准仪进行数据通信,回收无线静力水准仪采集的数据、对无线静力水准仪进行参数设置。数据采集记录仪将采集到的数据进行本地存储,同时将数据传送给数据采集服务器。
数据采集服务器将数据采集记录仪上传的数据进行本地存储与显示,并通过Internet将数据发送给监控量测单位进行远程实时监控。
3 设计方案
3.1 电容式静力水准仪结构与测量原理
静力水准仪位移测量采用电容式位移测量技术,水准仪机械结构示意图如图3所示。水准仪机械结构的主要组成部分有电容A极、电容B极、浮子、导向套和壳体。电容A极为外敷绝缘层的紫铜棒,电容B极为外敷绝缘层的紫铜管,浮子、导向套和壳体均为不锈钢材料。电容A极和B极同心且之间存在一定空隙,A极和B极之间的电容为

式中:RA为A极的外径;RB为B极的外径;ε0为真空介电常数;εr为介质相对介电常数;L为A、B极轴向重合部分的长度。由式(3)可见,对于一个设计完成的水准仪,式(3)的右边表达式中除L外均为常量,即A、B极之间的电容与重合长度L成正比。浮子的上部为屏蔽管,中部为浮子,下部为导向内筒,当浮子随着水准仪壳体内的水位上下移动时,屏蔽管在电容A、B极之间上下移动,从而引起A、B极之间有效重合长度L的改变,这样通过测量A、B极之间的电容值即可得到水准仪内的水位。
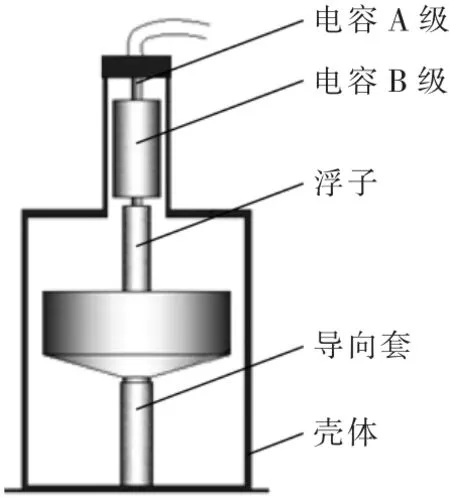
图3 静力水准仪机械结构示意图Fig.3 Mechanical structure diagram of hydrostatic leveling
3.2 水准仪测量及通信电路设计
水准仪测量电路原理如图4所示,由于水准仪电容非常微小,仅几个皮法,若采用传统的分立式解决方案,则成本高、功耗大、设计困难,并且很难达到较高的测量精度和低功耗的设计要求,因此水准仪电容的测量采用单片集成的芯片AD7746。
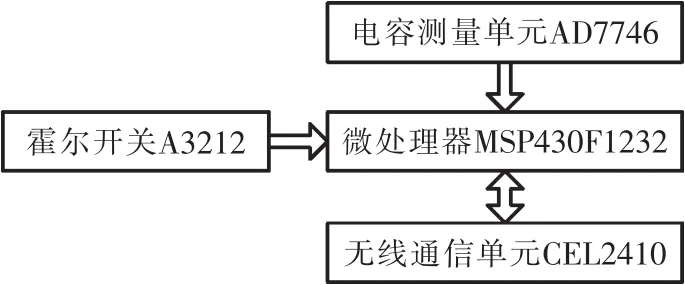
图4 水准仪测量电路原理Fig.4 Circuit schematic diagram of hydrostatic leveling
AD7746是美国模拟器件公司的产品,是完全集成的电容/数字转换器CDC(capacitance-to-digital converter)[9],AD7746将先进的信号处理技术与高集成度制造工艺相结合,在一颗芯片上集成了电容到数字转换的所有电路,提供了高精度、超低功耗的电容测量,非常适合水准仪中微小电容量的检测。AD7746通过自带的I2C总线和微处理器MSP430F1232通信,接收来自微处理器的控制信息并将测量数据上传给微处理器。
水准仪测量电路采用TI公司出品的MSP430F1232单片机作为主控微处理器[6]。水准仪测量电路中微处理器的任务非常简单,因此微控制器的选型主要考察其低功耗特性。TI公司出品的MSP430系列16位单片机是业界公认的优秀超低功耗单片机,其电源电压在1.8 V~3.6 V,非常适合电池供电;待机电流小于1 μA,在RAM数据保持时耗电仅0.1 μA,活动模式时耗电250 μA/MIPS;其时钟系统包括2个不同的时钟系统,基本时钟系统和锁频环系统,由时钟系统产生CPU和各种功能模块所需的时钟,这些时钟可以在指令的控制下打开或关闭,从而实现对总体功耗的控制。
为了达到低功耗的要求,水准仪测量工作在间歇模式,即测量和通信电路通常处于休眠状态,按照设定的时间间隔激活测量和通信。霍尔开关的作用在于当需要人为激活测量和通信功能时可利用霍尔开关进行功能激活,霍尔开关选用美国Allegro Microsystems公司生产的微功耗霍尔开关芯片A3212,A3212的平均功耗仅为 15 μW。
静力水准仪和数据采集记录仪的通信采用ZigBee无线传感网络,ZigBee网络基于IEEE 802.15.4国际标准、上层协议为ZigBee协议栈,具有低功耗、低速率、高可靠性、网络路由功能强大、自恢复及冗余性能优异等特点,广泛应用低数据率监控的各个领域。无线通信单元采用ZICM2410模块(美国CEL公司的MeshConnectTM模块),ZICM2410模块的内核芯片ZIC2410是一个真正的单芯片解决方案,遵从ZigBee规范和IEEE 802.15.4标准,它由一个含有基带modem的射频收发器、硬连线的MAC和内嵌8051内核的微控制器(带有内部Flash存储器)组成,为ZigBee网络提供一个高性能、低成本的射频收发方案。
3.3 室外天线
室外天线实际上是一个ZigBee无线传感网络和RS485接口之间的协议转换器,负责将水准仪传输的无线传感网络数据转换成RS485后传送给数据采集记录仪,并负责将数据采集记录仪下发的控制指令转换成ZigBee无线传感网络数据,其组成如图5所示。
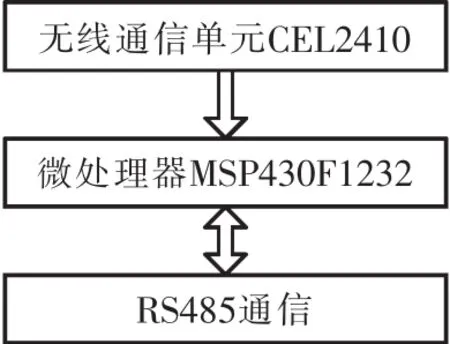
图5 室外天线电路原理图Fig.5 Circuit schematic diagram of outdoor antenna
3.4 数据采集记录仪
数据采集记录仪原理如图6所示。数据采集记录仪组成主要有8路下位RS485接口、1路上位RS485接口、实时时钟、大容量数据存储、LED指示和带电池备份的电源系统。
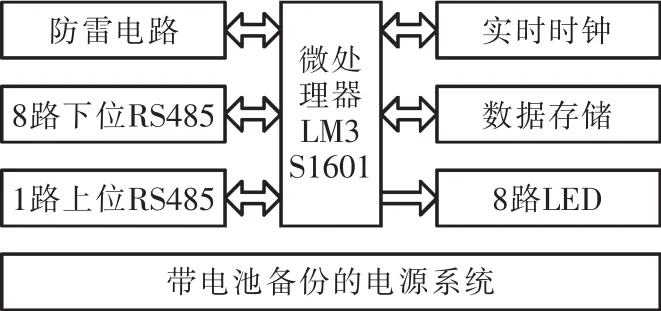
图6 数据采集记录仪原理图Fig.6 Block diagram of data acquisition and recording device
8路下位RS485接口和室外天线通信,接收来自无线静力水准仪的测量数据并负责控制数据的下发,设计多路接口是为了保证静力水准仪数量很多情况下通信的可靠性。8路下位RS485接口前端设计有防雷电路。
1路上位RS485接口和数据采集服务器通信,将来自静力水准仪的测量数据传送给数据采集服务器,并接收来自数据采集服务器的控制指令。8路LED灯指示当前数据采集记录仪的工作状态,便于维修人员进行故障诊断。
为了提高系统的可靠性,数据采集记录仪设计有实时时钟、大容量数据存储和带电池备份的电源系统。当数据采集服务器因感染病毒、网络瘫痪等原因停止工作时,数据采集记录仪自动将来自无线静力水准仪的测量数据加上时间戳并进行本地保存,待数据采集服务器正常工作时再将本地数据上传;数据采集记录仪电源采用双电源供电,可在正常供电时外加一路蓄电池供电,当发生电力故障时,蓄电池可继续维持数据采集记录仪的工作。
数据采集记录仪对微处理器的要求相对较高,共达9路的RS485通信对微处理器的内存空间、指令执行速度、中断能力和调度策略均提出了一定的要求。数据采集记录仪采用了TI公司的LM3S1601微控制器[7],LM3S1601微控制器基于ARM®CortexTMM3,其最高处理速度50 MHz,具有256 KB FLASH程序存储空间、64 KB RAM数据存储空间和极快的中断处理能力,完全满足数据采集仪的要求。LM3S1601微控制器片上有3路片上UART,其余6路UART由多个SC16IS752芯片扩展。
4 系统标定与应用
标定试验在位移标定台上进行,将图3中的电容A级和B级固定在位移标定架的一端,浮子固定在位移标定架的活动部分并与电容测量电路的地线连接。调整位移架的位移标定距离,并比较电容测量电路输出值 (AD7746进行电容测量并输出的与电容值成比例的AD转换值)和游标卡尺的实测数据,如表1所示。
根据该表,采用最小二乘法可求得由AD7746输出值转换到实际位移的灵敏系数如式(4)所示。

式中:X为 AD7746输出值;Y为位移值;A为113.4;B 为-1.43133×10-5。

表1 位移测量标定结果表Tab.1 Result table of displacement calibration
根据系数计算测量值可得到位移测量的误差,如表2所示。
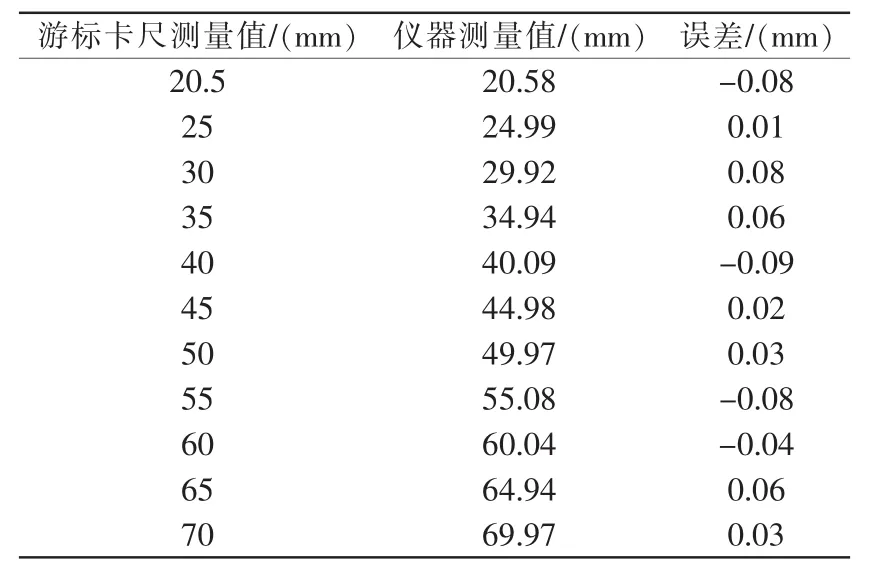
表2 测量值误差分析表Tab.2 Error analysis table of test data
最大误差不超过0.1 mm。可以满足部分地下工程沉降监测的需要。研制的水准仪在南京地铁某工程施工中进行了研究性试用,静力水准仪与人工监测数据曲线对比如图7所示。
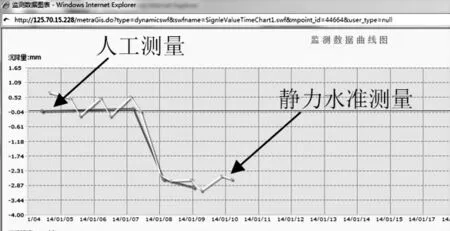
图7 人工与静力水准仪监测数据比较图Fig.7 Comparison diagram of the monitoring data form hydrostatic leveling and man-made
由图可见,静力水准仪数据稳定,且与人工监测数据相差不超过0.05 mm,应用情况良好。
5 结语
论文研制的电容式静力水准仪功耗低,可以采用电池供电和无线网络数据传输,减少了现场布线成本,同时也提高了系统的可靠性,十分适合施工期沉降监测,具有一定的推广应用价值。
[1] 白韶红.静力水准仪在北京城铁变形监测中的应用[J].中国仪器仪表,2003(11):34-36.
[2] 韩贤权,李端有,谭勇,等.数字水准仪自动化监测系统在大坝变形监测中的应用[J].测绘科学,2010,35(3):173-175.
[3] 于来宝,陈志高,郭晓菲,等.磁致伸缩液位传感器在水准仪上的应用研究[J].自动化与仪表,2010,25(4):20-21.
[4] 杨学存.超声波静力水准仪的研制[D].陕西:西安科技大学,2005.
[5] 陈德福,聂磊.液体静力水准仪及其应用[M].北京:地震出版社,2008:36-51.
[6] 胡大可.MSP430系列超低功耗16位单片机原理与应用[M].北京:北京航空航天大学出版社,2001.
[7] Luminary Micro,inc.LM3S1601 Microcontroller DATA SHEET[M].Texas:Luminary Micro,inc,2007.
[8] 王宏伟,张伟,林宇,等.差动电容敏感式力学传感器的信号提取电路[J].电子元件与材料,2003,22(3):10-12.
[9] AD7745 DataSheet.24-Bit Capacitance to Digital Converter with Temperature Sensor[Z].Analog Devices,Inc,2005. ■
