林木联合采育机作业过程中的稳定性1)
2014-03-06苏永涛刘晋浩丁小康
苏永涛 刘晋浩 丁小康
(北京林业大学,北京,100083)
“十一五”国家科技支撑计划重大项目“多功能林木采育作业关键技术装备研究与开发”(2006BAD11A15),研制成功了国内首台多功能林木采育装备。该多功能林木联合采育机,是集采伐、打枝、造材、集材、归堆、清林和采伐剩余物收集等于一体的机械,其提高了劳动生产率和木材生产的安全性,并改善了林区作业条件[1-3]。本文主要通过建立大脑情感学习模型,对获取的环境与运动数据信息进行融合,对多车辆稳定性作出判断;通过对联合采育机的纵向稳定性和横向稳定性两个方面进行研究[4],为驾驶员提供危险预警,便于驾驶员的作业操作。
1 采育机纵向稳定性计算与判断
采育机作业稳定性,是指作业时不发生倾翻的能力。在作业过程中,由于坡度、方位角等一系列因素的影响,可能发生向前或向后的纵向失稳[5]。通过计算特征面外法矢量特征值,即可判断采育机向前或向后的静态稳定性:当外法矢量Z 值大于0时,即为该方向上的稳定状态;当外法矢量Z 值等于0 时,即采育机为该方向的翻倾临界状态;当外法矢量Z 值小于0 时,即采育机在该方向上为翻倾状态,采育机将会发生相应方向上的纵向失稳。
下面以向前的纵向失稳为例,分析计算采育机向前纵向失稳的计算与判断方法。
1.1 纵向稳定性计算
设平面MON 外法矢量为(XMON,YMON,ZMON),分别计算平面MON 的内外法向量为:
利用立体三角形中向量之间的夹角关系,判断平面MON 的外法矢量,并将相应的值赋给平面MON 的外法矢量(XMON,YMON,ZMON)。
1.2 纵向稳定性判断
根据特征矢量法,判断采育机向前稳定性。若ZMON>0,则采育机向前为稳定状态;若ZMON=0,则采育机向前为倾翻临界状态;若ZMON<0,则采育机向前为不稳定状态,向前翻倾。
利用相同计算方法,可计算并判断采育机向后的稳定性。设平面POQ 外法矢量为(XPOQ,YPOQ,ZPOQ),则:若ZPOQ>0,则向后为稳定状态;若ZPOQ=0,则向后为倾翻临界状态;若ZPOQ<0,则向后为不稳定状态。
2 采育机横向稳定性计算与判断
2.1 横向一级稳定性计算与判断
采育机在作业过程中,除了可能发生前后的纵向失稳外,还会发生横向的失稳。由于采育机后桥与整机的链接只有一个支撑点,因此,后桥可以产生上下自由摆动,后桥与前轮接地点连线构成了采育机横向一级失稳的翻倾轴;所以,在计算采育机横向一级失稳的过程中,应采用的质心为整机除后桥外的质心用于计算。通过计算翻倾轴与整机除后桥外质心构成平面的外法矢量,即可判断采育机横向一级失稳向左或向右的静态稳定性。当外法矢量Z>0时,即为该方向上的稳定状态;当外法矢量Z=0 时,即采育机为该方向的翻倾临界状态;当外法矢量Z<0 时,即采育机在该方向上为翻倾状态,其将会发生相应方向上的横向一级失稳。
下面以向右的横向一级失稳为例,分析计算采育机向右横向一级失稳的计算与判断方法。
2.1.1 横向一级稳定性计算
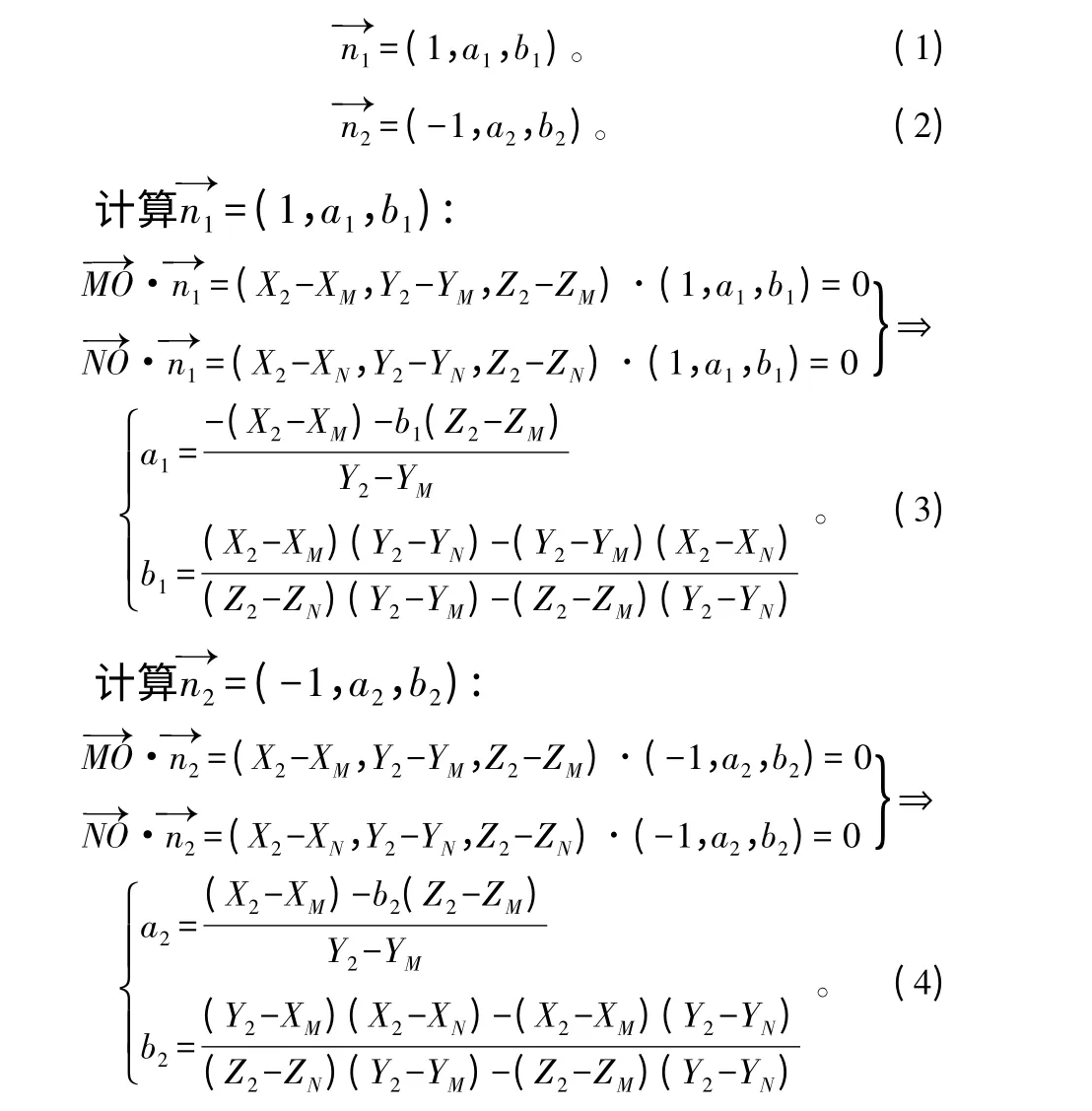
设平面EO2N 外法矢量(XEO2N,YEO2N,ZEO2N),分别计算平面EO2N 内外法向量为=(1,a1,b1)=(-1,a2,b2)。


利用立体三角形中向量之间的夹角关系,判断平面EO2N 的外法矢量,并将相应的值赋给平面MON 的外法矢量(XEO2N,YEO2N,ZEO2N)。若·>0,则(XEO2N,YEO2N,ZEO2N)=;若·>0,则(XEO2N,YEO2N,ZEO2N)=。
2.1.2 横向一级稳定性判断
根据特征矢量法,判断采育机向右的横向一级稳定性。若ZEO2N>0,则向右横向一级稳定性稳定;若ZEO2N=0,则向右横向一级稳定性倾翻临界状态;若ZEO2N<0,则向右横向一级稳定性不稳定状态。
利用相同的计算方法,可计算并判断采育机向后的稳定性。设平面EO2M 外法矢量为(XEO2M,YEO2M,ZEO2M),则:若ZEO2M>0,向左横向一级稳定性稳定;若ZEO2M=0,向左横向一级稳定性倾翻临界状态;若ZEO2M<0,向左横向一级稳定性不稳定状态。
2.2 横向二级稳定性计算与判断
轮式联合采育机,在发生横向一级失稳后会继续发生其他的失稳状态。以向右的横向一级失稳为例,转向角θ 为轮式联合采育机以方位角φ 置于斜坡上,发生横向向右的一级失稳。在发生横向向右的一级失稳后,除后桥外的整机质心将绕翻倾轴EN旋转,使摆动桥右侧两限位块相接触;由于除后桥外的质心的旋转,使得整机的质心因此偏转,此时即可判断轮式联合采育机是否会发生其他形式的失稳。分别以后轮接地点连线PQ 和两右轮QN 连线为翻倾轴,当旋转后的整机质心在PQ 以外时,采育机向后纵向翻倾;当旋转后的质心在QN 以外时,采育机向右横向二级失稳;当旋转后的质心在PQ 和QN 以内时,采育机将在一级失稳后保持稳定状态。
设平面EO3N 的外法向量为(XEO3N,YEO3N,ZEO3N),分别计算平面EO3N 内外法向量为:n=(1,a1,b1)=(-1,a2,b2)。
利用立体三角形中向量之间的夹角关系,判断平面EO3N 的外法矢量,并将相应的值赋给平面EO3N 的外法矢量(XEO3N,YEO3N,ZEO3N),若·>0,则(XEO3N,YEO3N,ZEO3N)=;若·>0,则(XEO3N,YEO3N,ZEO3N)=。
根据特征矢量法,判断采育机向右横向一级失稳后横向二级稳定性状态。若ZEO3N>0,则向右横向二级稳定性稳定状态;若ZEO3N=0,则向右横向二级稳定性倾翻临界状态;若ZEO3N<0,则向右横向二级稳定性不稳定状态。
利用相同的计算方法,可计算并判断采育机横向一级失稳后向后的稳定性。设平面PO3Q 外法矢量为(XPO3Q,YPO3Q,ZPO3Q),则:若ZPO3Q>0,则向右一级失稳后不会再发生向后翻倾失稳;若ZPO3Q=0,则向右一级失稳后处于向后翻倾失稳临界状态;若ZPO3Q<0,则向后一级失稳后会继续再发生向后翻倾失稳;当ZPO3Q>0,且ZQO3N>0,则采育机向右横向一级失稳后,既不会发生向右横向二级失稳,也不会发生向后的纵向失稳,保持稳定状态。
同理,可采用相同的计算方法,建立采育机向左一级失稳后各失稳状态判断计算方法。
设平面PO4M 的外法矢量为(XPO4M,YPO4M,ZPO4M),利用特征矢量法判断采育机向左横向一级失稳后横向二级稳定性。若ZPO4M>0,则采育机向左横向一级失稳后不会发生横向二级失稳;若ZPO4M=0,则采育机向左横向一级失稳后处于横向二级失稳临界状态;若ZPO4M<0,则采育机向左横向一级失稳向后发生横向二级失稳。
设平面PO4Q 的外法矢量为(XPO4Q,YPO4Q,ZPO4Q),利用特征矢量法判断采育机向左横向一级失稳后纵向稳定性。若ZPO4Q>0,则向后为稳定状态;若ZPO4Q=0,则向后为倾翻临界状态;若ZPO4Q<0,则向后为不稳定状态;当ZPO4M>0,且ZPO4Q>0,则采育机向左横向一级失稳后,既不会发生向左横向二级失稳,也不会发生向后纵向失稳,保持稳定状态。
3 结束语
林木联合采育装备作为一种高性能的现代化林业复合装备,在人工林地作业,显示出无法比拟的先进性,为采伐工人提供了安全、舒适的工作环境,从而提高了生产效率和木材利用率[6]。目前,在国际林业采育行业的应用越来越广,显示出巨大的发展潜力。多功能林木采育装备在作业过程中的稳定性,是设计和实现人工智能化的重要指标,因此,对其稳定性的研究具有十分重要的现实意义和应用价值。
[1] 赵文锐,刘晋浩.伐木联合机的现状及发展[J].林业机械与木工设备,2008,36(11):10-12.
[2] 鲍际平,刘晋浩,魏占国,等.世界采运机械的采伐方式及发展进程[J].湖北农业科学,2009,48(8):2004-2006.
[3] 王典,刘晋浩,王建利.基于系统聚类的林地内采育目标识别与分类[J].农业工程学报,2011,27(12):173-177.
[4] 王猛猛,鲍际平,刘晋浩.基于虚拟样机技术的联合采伐机静态稳定性分析[J].湖北农业科学,2009,48(6):1485-1487.
[5] 郭世怀,刘晋浩,孙治博,等.轮式林木联合采育机林地越障能力分析与仿真[J].江苏农业科学,2013,41(8):387-389.
[6] 魏占国,王忠伟,刘晋浩.基于现代设计技术林木联合采育机的设计及评价体系[J].东北林业大学学报,2013,41(8):146-149.
