基于PIC12F629设计的LGYG型汽车雨刮控制器
2014-03-05高波,赵辉
高 波,赵 辉
(中国电子科技集团公司第四十研究所,安徽蚌埠,233010)
1 引言
汽车工业是国民经济发展的支柱产业之一,现代汽车正从一种单纯的交通工具朝着人们需求和安全、节能、环保的方向发展。为了满足人们对汽车日益提高的要求,汽车研发及生产机构必然要将越来越多的电子产品引入到汽车上。随着汽车电子的迅猛发展,机械式、晶体管式的汽车雨刮器越来越满足不了汽车刮水系统的要求,原来的雨刮器功能单一,只有简单的刮水功能,且操作烦琐。因此,研制新型、多功能的电子式雨刮器就提到了许多汽车厂家的议事日程上。
我公司根据市场及用户的要求,自主开发出LGYG型汽车雨刮控制器(以下简称汽车雨刮器),该产品为单片机统一控制的电子式智能汽车雨刮器,除应满足一般汽车雨刮器的电气性能外,还满足间歇刮水的功能,应用单片机控制,工作稳定性和抗干扰性能也得到很大的提高,本产品的成本较低,投入市场时的市场售价仅为60元/只。
2 主要技术参数和功能
2.1 主要技术参数
汽车雨刮器采用单片机控制,不仅设计先进、控制精度高、抗干扰能力强,而且安装使用方便,工作状态稳定,在同类产品中居于领先水平。其主要技术指标如下:
标称电压:24Vdc;
工作电压:18Vdc~30Vdc;
工作环境温度:-30℃ ~70℃;
单速刮水工作时间:(1±0.05)S;间歇刮水断开时间:(5±0.5)S。
2.2 功能
1、雨量较大时的刮水控制:雨天时,驾驶员打开刮水开关,当雨量较大时,系统发出单速控制指令,通过单片机打开单速控制开关,雨刮控制器的单速刮水开始工作;
2、雨量较小时的挂水控制:雨天时,驾驶员打开刮水开关,当雨量较小时,系统发出间歇控制指令,单片机打开间歇控制开关,雨刮器的间歇挂水开始工作。
3 系统的硬件电路设计
汽车雨刮器采用PIC12F629单片机控制,雨量较大时,系统发出单速控制指令,单片机打开单速控制开关,单速刮水开始工作;雨量较小时,系统发出间歇控制指令,单片机打开间歇控制开关,间歇刮水开始工作。工作时,先是单片机采样到逆控信号,雨刮电机逆转,转到位置后,单片机采样到顺控信号,雨刮电机顺转,逆转、顺转循环进行,实现刮水功能。
根据汽车雨刮器的技术指标和要求,采用单片机控制,单片机通过采样电路采样单速控制或间歇5s控制信号、逆控或顺控信号,然后单片机通过正、反转输出控制电路实现对刮水电机的控制。汽车雨刮器的工作原理框图、电路图及接线图如图1、图2、图3所示。
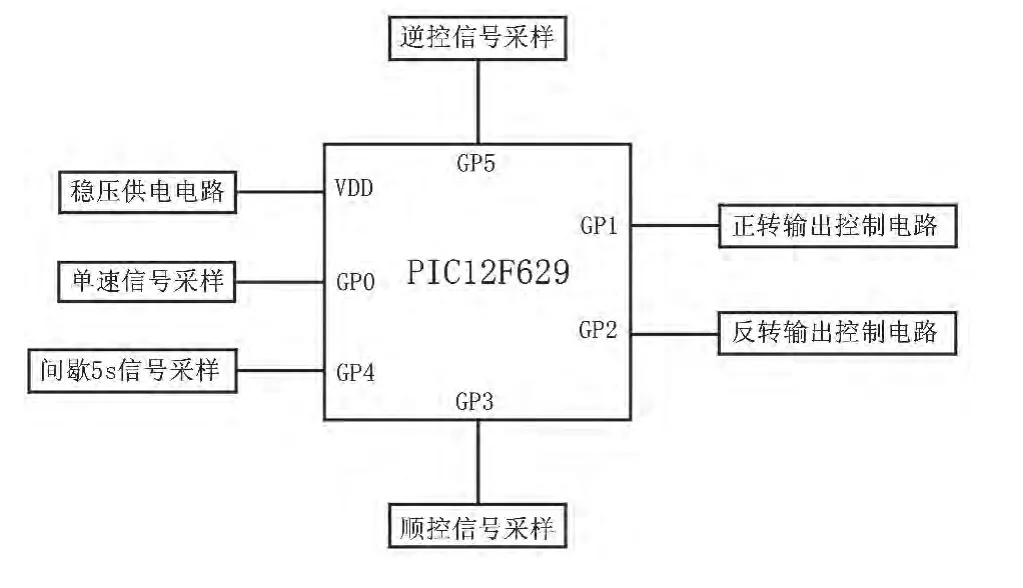
图1 汽车雨刮器原理框图
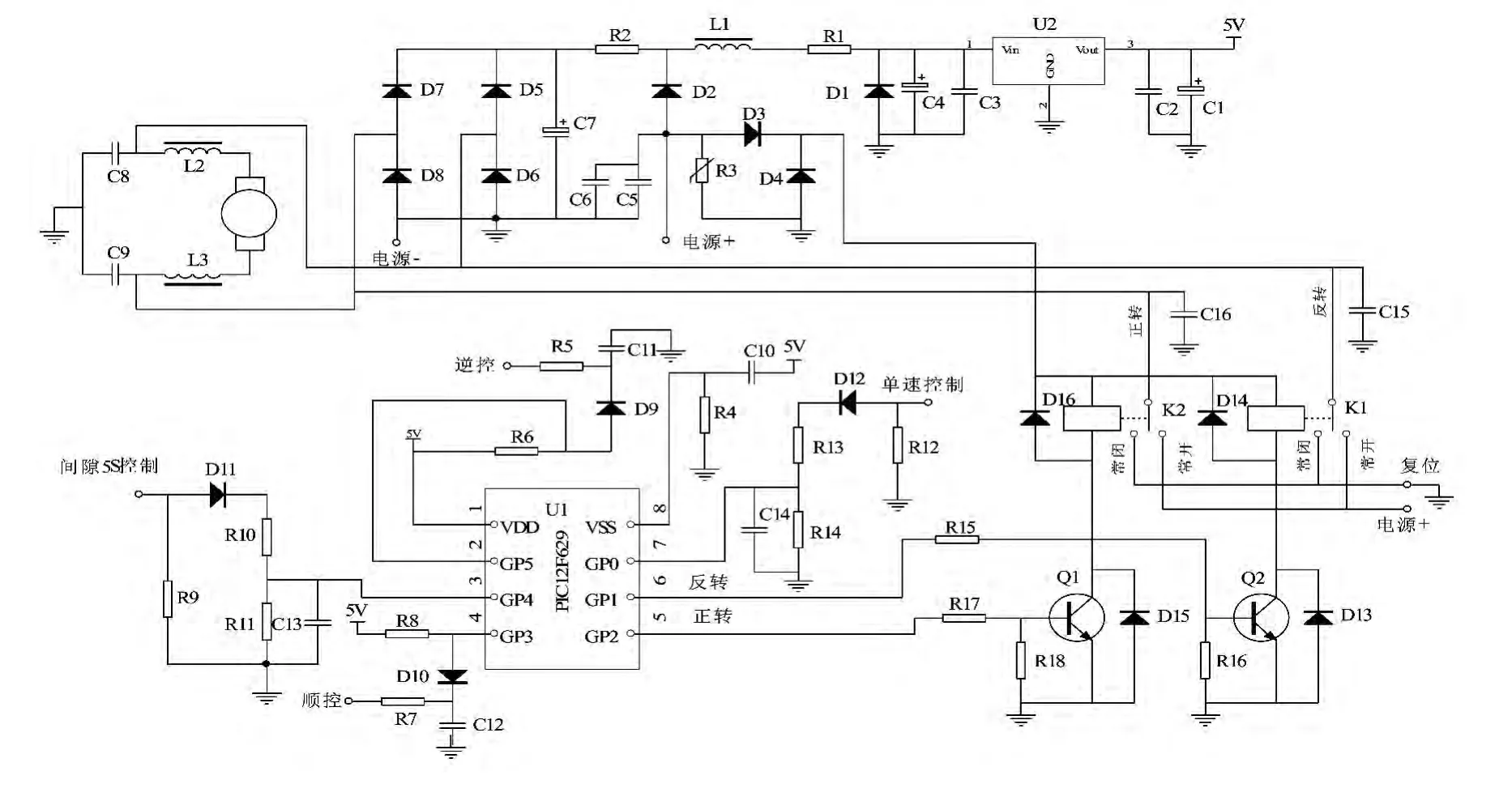
图2 汽车雨刮器的原理图

图3 汽车雨刮器的外围接线图
汽车雨刮器主要由稳压供电电路、输入信号采样电路(包括单速控制、间歇5s控制、顺控、逆控等信号采样)和输出控制电路(包括正转、反转)组成,通过单片机统一控制实现其各自电路的功能。
3.1 稳压供电电路的设计
稳压供电电路的设计原理图如图4所示。电源+经过防反二极管D2,电感L1和限流电阻R1后接到U2(78L05)的Vin端,经过U2稳压,Vout输出为无干扰的5V电压给单片机PIC12F629供电。图4中的C1、C2、C3、C4为滤波电容。
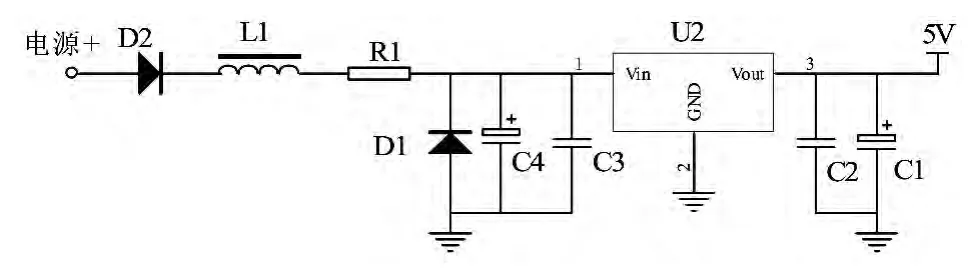
图4 稳压供电电路原理图
3.2 输入信号采样电路
输入信号采样电路的设计原理图如图5、图6所示。输入信号主要有间歇5s控制信号、单速控制信号、顺控信号和逆控信号组成。其中,间歇5s控制信号、单速控制信号采样的设计原理图如图5所示。
间歇5s控制信号经过防反二极管D11后,再经过分压电子R10、R11分压,电压信号接入单片机的GP4引脚;
单速控制信号经过防反二极管D12后,再经过分压电子R13、R14分压,电压信号接入单片机的GP0引脚;
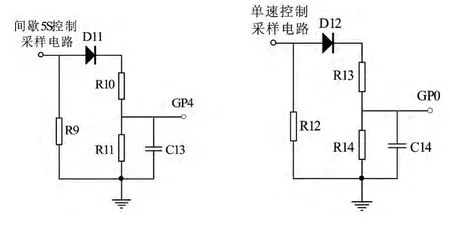
图5 间歇5s控制(单速控制)信号采样原理图
其中,顺控信号、逆控信号的采样设计原理图如图6所示。
采样顺控信号时,顺控信号为低电平,5V电压信号经过方法二极管D10,再经过R8、R7分压后,电压信号接入单片机的GP3引脚;
采样逆控信号时,逆控信号为低电平,5V电压信号经过方法二极管D9,再经过R6、R5分压后,电压信号接入单片机的GP5引脚;
3.3 输出控制电路
输出控制电路的设计原理图如图7所示。输出控制电路分为正转输出控制电路和反转输出控制电路,单片机 GP2输出为高电平时,经过 R17、R18分压后,三极管Q1接通,进而继电器K2接通,正转端L3输出高电平,雨刮电机正转;单片机GP1输出为高电平时,经过R15、R16分压后,三极管Q2接通,进而继电器K1接通,正转端L2输出高电平,雨刮电机反转。
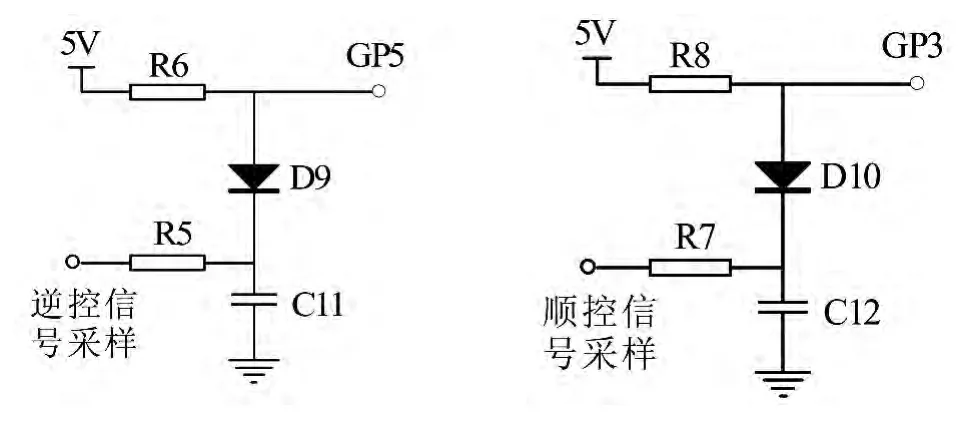
图6 顺控(逆控)信号采样原理图
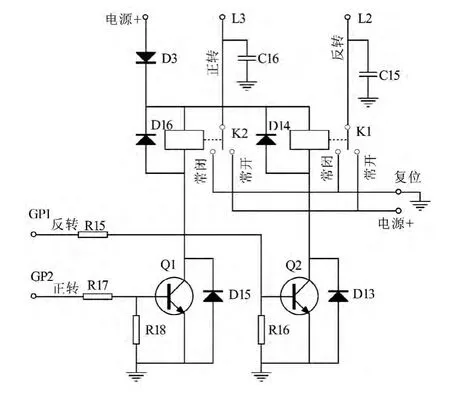
图7 输出控制电路原理图
4 系统的软件设计
雨刮控制器通过PIC12F629执行单速控制、间歇控制、正转、反转等各种控制命令,具体流程见图8。
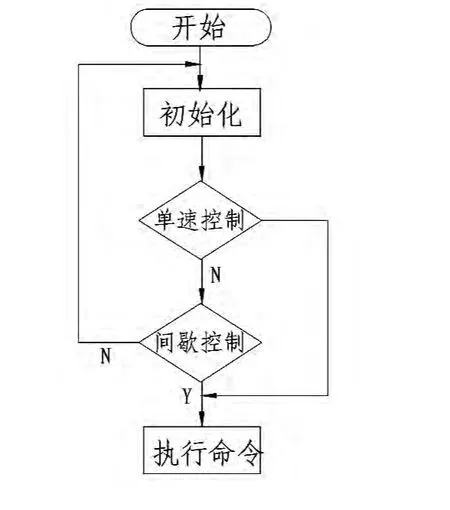
图8 程序控制流程图
具体程序如下:
list p=12f629
#include <p12f629.inc>
status equ 03h
c equ 0
z equ 2
rp0 equ 5
gpio equ 05
cmcon equ 19h
trisio equ 85h
OSCCALEQU 90H
counter equ 20h
count1 equ 22h;
COUNT2equ23h;
count3 equ 24h;
count4 equ 26h;
org 00h
goto MAIN
org 10h
MAIN
bcf status,rp0
clrf gpio
MOVLW 0X07
MOVWFCMCON
bsf status,rp0
movlw 0x3A
movwf trisio
CALL3FFH
MOVWFOSCCAL
bcf status,rp0
clrf gpio
call delay0.2s
call delay0.2s
call delay0.2s
START
clrf gpio
BTFSS GPIO,4
GOTO X099
GOTO DS
X099
BTFSS GPIO,5
GOTO START
GOTO JX
DS
BSF GPIO,0
BCF GPIO,2
BTFSC GPIO,1
GOTO DS
GOTO DS1
DS1
BCF GPIO,0
BCF GPIO,2
call delay0.1s
DS2
BCF GPIO,0
BSF GPIO,2
BTFSC GPIO,3
GOTO DS2
BTFSS GPIO,4
GOTO START
GOTO DS3
DS3
BCF GPIO,0
BCF GPIO,2
call delay0.1s
GOTO DS
JX
BSF GPIO,0
BCF GPIO,2
BTFSC GPIO,1
GOTO JX
GOTO JX1
JX1
BCF GPIO,0
BCF GPIO,2
call delay0.1s
JX2
BCF GPIO,0
BSF GPIO,2
BTFSC GPIO,3
GOTO JX2
GOTO JX3
JX3
BCF GPIO,0
BCF GPIO,2
MOVLW 0X18
MOVWFCOUNT2
DELAY02
call delay0.2s
BTFSS GPIO,5
GOTO START
decfszCOUNT2,1
goto DELAY02
goto JX
delay20ms movlw 0xc8
movwfcount3
loop2 movlw 0x20
movwfcount1
loop1 decfsz count1,1
goto loop1
decfsz count3,1
goto loop2
return
delay0.1s movlw 0x01
movwfcount4
m00 movlw 0x82
movwfcount3
loop62 movlw 0xff
movwfcount1
loop52 decfsz count1,1
goto loop52
decfsz count3,1
goto loop62
decfsz count4,1
goto m00
return
delay0.2s movlw 0x02
movwfcount4
m0 movlw 0x82
movwfcount3
loop61 movlw 0xff
movwfcount1
loop51 decfsz count1,1
goto loop51
decfsz count3,1
goto loop61
decfsz count4,1
goto m0
return
end
5 结束语
本文通过对基于PIC12F629设计的LGYG型汽车雨刮控制器的硬件电路设计和软件电路设计的介绍,并且详细介绍了稳压供电电路设计、信号采样电路设计、输出控制电路设计、软件程序设计,并经过技术攻关,研制出LGYG型汽车雨刮控制器,经鉴定试验,其各项技术指标均达到了设计要求。
[1] 陈志刚,刘凯,赵辉.YG24型雨刮间隙控制器的设计.机电元件 2013.4.
[2] 林晓东.雨刮器的电路设计.汽车电器2002.7.
[3] 杨义先.浅谈雨刮器的设计.汽车配件2001.5.
[4] QC/T413-2002汽车电气设备基本技术条件.