基于三维激光扫描技术的料位检测试验研究
2014-03-04余乐文朱瑞军王利岗
余乐文,张 达,朱瑞军,王利岗
(1.北京矿冶研究总院,北京102628;2.承德铜兴矿业有限责任公司,河北 承德067250)
在矿山实际生产过程中,对选矿仓料位的检测非常重要,准确、全面的料位检测可以防止料仓矿物排空或矿物溢出,从而避免因料仓料位测量不准带来的生产事故和经济损失。目前主要测量方法包括重锤式料位计、超声波物位计、脉冲雷达物位计、导波雷达物位计等,但是由于选矿料仓深、卸放矿物引起的灰尘多等实际难题,目前的测量方法存在受粉尘影响大、有矿堆死角、测量不准确、可靠性差、设备损坏率高等缺点[1-5]。针对上述工况,提出基于三维激光扫描技术的料位检测方法,该方法可快速、全面、准确地测量料位高度,对防止料仓排空或者溢出、保障矿山安全生产具有重要作用。
1 常见料位测量方法
目前,国内外料位在线检测普遍采用单点测量法,主要包括雷达法、超声波法、重锤法等。Siemens、E+H、Sick等公司的物位计被广泛应用。
1.1 重锤法
重锤法是利用失重原理测量料位。测量时,探测器控制重锤快速下降,当重锤接触物料表面时,会使和重锤相连的钢丝绳产生失重,此时电机就将重锤提起,返回待测位置。探测器内的编码器发出脉冲信号,由计算机进行计算处理后,在控制器面板上显示料面的位置或相对位置。重锤法由于采用接触式测量方法,运行可靠、不受粉尘影响,但是在放矿过程中钢丝绳易被矿石击中而损坏,维护难度大,同时单点测量存在矿堆死角,测量结果不全面、不准确。
1.2 超声波法
超声波法是非接触式测量方法,采用声波测距原理测量料位,频率一般为20kHz~40kHz。超声波物位计安装于料仓顶部,在电子单元的控制下,探头向物料表面发射一束超声波脉冲,声波经物料表面反射,部分反射回波由探头接收并转换为电信号。从超声波发射到被重新接收,其时间与探头至被测物体的距离成正比。电子单元通过超声波发射与接收的时间差计算距离。超声波法具有声波传播衰减小、界面反射信号强、发射和接收电路简单等优点。但超声波的传播速度受介质的密度、浓度、温度、压力等因素影响,其测量精度较低,同时超声波法是单点测量法,测量存在盲区和矿堆死角。
1.3 雷达法
雷达法是非接触式测量方法,采用雷达测距工作原理。向被测目标发射雷达,由目标反射的回波返回发射器被接收,与发射波进行比较,计算出发射器到目标的距离。雷达法具有测量精度高、抗干扰能力强、穿透介质能力强等优点。但是,雷达法也是单点测量方法,测量也存在盲区和矿堆死角。
2 三维激光扫描测量方法
三维激光扫描技术是一项迅速发展的高新技术,它的出现为空间三维信息的获取提供了全新的技术手段。三维激光扫描技术主要采用激光测距原理,具有扫描速度快、非接触式工作、测量精度高等优点,被广泛应用于空间三维形态探测[6-8]。
三维激光扫描仪通过发射激光脉冲,经被测物表面反射,到仪器接收所经过的时间差来计算距离S,同时内置精密编码器同步测量每个激光脉冲横向扫描角度观测值α和纵向扫描角度观测值θ,如图1所示,x轴在横向扫描面内,y轴在横向扫描面内与z轴垂直,z轴与横向扫描面垂直,由此可得到任意P点坐标的计算公式:
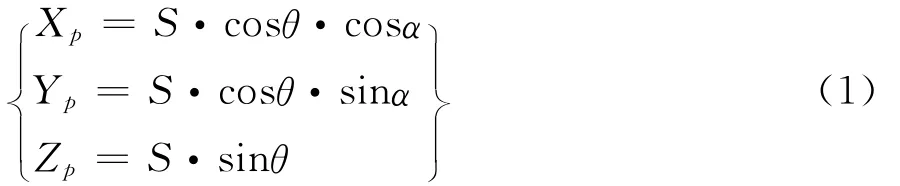
距离S计算公式为:

式中:c为激光在大气中的传播速度,t为激光在待测距离上的往返传播时间。
3 试验及结果
为了验证三维激光扫描技术在料位检测中的可行性,选择在某矿山选矿料仓开展试验研究。该料仓高20m,直径22m,上部有三个给料口,下部有8个送料口,分别连接8台1 200×4 000带式给矿机。
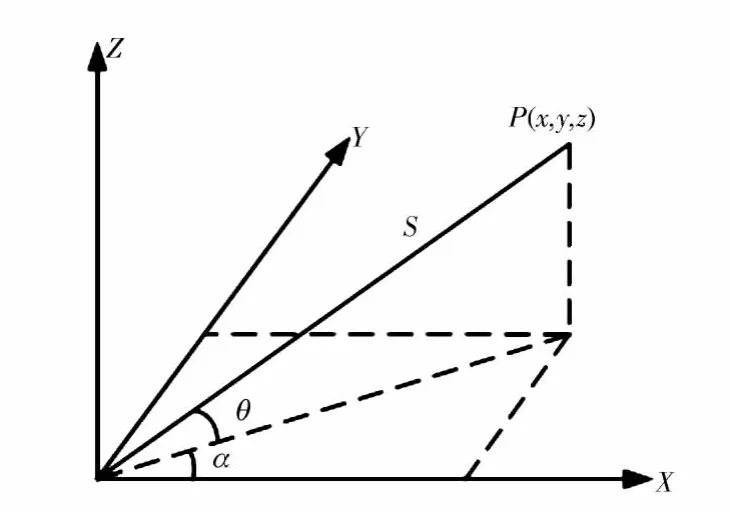
图1 三维点坐标Fig.1 The 3Dcoordinates
目前该料仓选用1个西门子超声波物位计来测量料位高度,如图2所示。
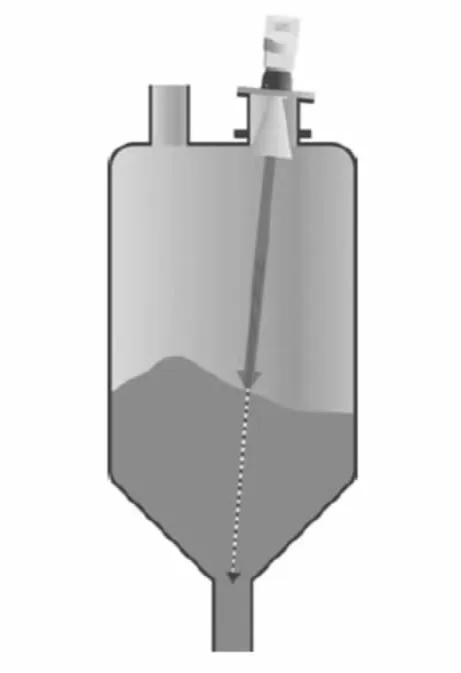
图2 单点测量法Fig.2 The method of signal point
但是测量点少,只能测出1个测量点的料位高度,存在盲区和矿堆死角,导致测量结果不全面、不准确。
试验中,采用自主研发的BLSS-PE矿用三维激光扫描测量系统进行试验[9-12],该系统由扫描主机、控制器、延长杆、PDA组成,如图3所示。将矿用三维激光扫描测量系统安装在料仓顶部,如图4所示。
采用0.5°的角度分辨率进行三维扫描,试验测量的点云数据如图5所示。测量点云数据达12万多个,测量点覆盖料位表面,可清晰看到出矿口和料仓的内壁形态。对点云数据进行三维重建,得出料仓内部的三维形态,如图6所示。
试验结果表明,三维激光扫描仪实现对料位全面扫描,形成密集网格点,对料位全方位覆盖,显示实际料位高度。实现测量数据对物料表面的全面覆盖,为料仓进出料智能控制提供依据。对测量数据进行三维建模,更准确直观地反映进出料的情况,实现真正的可视化,方便工作人员随时了解料位的真实情况,防止意外的发生,排除安全隐患。另外,选矿料仓内粉尘大、水汽多,系统工业应用中应该设计扫描主机镜头的防尘、防水装置,提高系统应用可靠性。
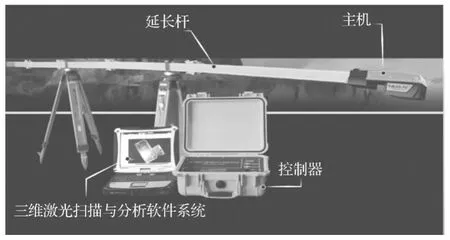
图3 矿用三维激光扫描测量系统Fig.3 3Dlaser scanning measurement system for mining

图4 现场试验Fig.4 The field test
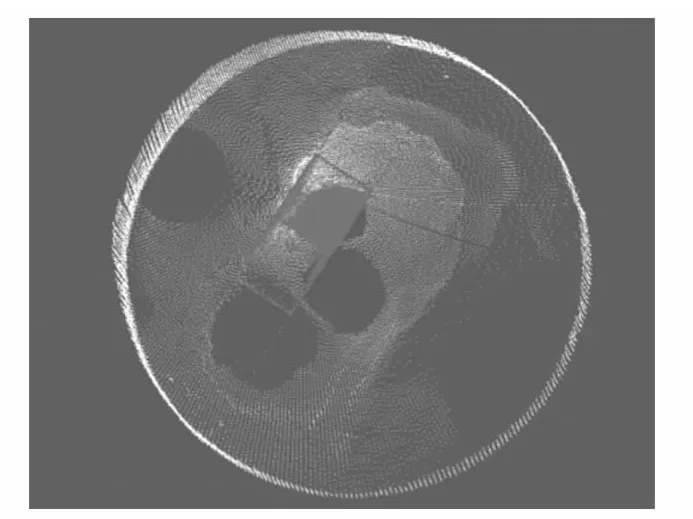
图5 料仓点云数据Fig.5 The point cloud dada of bin

图6 料仓三维模型Fig.6 The 3Dmodeling of bin
4 结论
三维激光扫描仪可快速、全面、准确地测量料位高度,对于防止料仓排空或者溢出、提高矿山安全生产水平具有重要意义。
基于三维激光扫描技术的料位检测方法还可以应用于矿山井下溜井料位检测,为井下运矿车辆智能调度提供技术支撑。同时还可应用于工业、农业等领域的料位检测,应用领域广泛,市场推广前景良好。
[1] 朱亚洲,熊庆国,肖 琴,等.我国物位测量技术的发展途径[J].工业仪表与自动化装置,2006(4):7-9,19.
[2] 斯建华.物位测量技术在生产中的应用[J].铜业工程,2004(1):46-47.
[3] 李喜东,周建华,牛 健,等.介质温度影响物位测量值的补偿方法[J].自动化技术与应用,2013,32(9):36-38,42.
[4] 潘国林,高幼年.基于机器视觉煤仓料位测量方法的研究[J].上海电力学院学报,2007,23(2):176-178,187.
[5] 杨 峰,龙玉汉.雷达物位计在煤仓料位测量中的应用[J].中国仪器仪表,2005(11):105-106.
[6] 杨贵军,柳钦火,武文波.三维激光扫描曲面重构算法研究[J].仪器仪表学报,2005,26(11):1181-1183,1194.
[7] 余乐文,张 达,余 斌,等.矿用三维激光扫描测量系统的研制[J].金属矿山,2012(10):101-103,107.
[8] 邾继贵,王 浩,任同群,等.便携式激光扫描三维形貌测量系统[J].机械工程学报,2005,41(2):166-169.
[9] 张 达,王利岗.三维激光扫描仪井下安全监测技术[J].有色金属(矿山部分),2011,63(4):1-4.
[10] 王利岗,张 达,杨小聪.井下空区安全监测三维激光扫描仪高精度运动控制技术[J].有色金属(矿山部分),2012,64(2):1- 4.
[11] 陈 凯,杨小聪,张 达.采空区三维激光扫描变形监测试验研究[J].有色金属(矿山部分),2012,64(5):1-5.
[12] 杨斐文,陆得盛,张 达,等.基于矿用三维激光扫描系统的CAN总线传输协议研究[J].有色金属(矿山部分),2013,65(5):5-7.
