一种电磁摆摆幅和周期的控制方法
2014-03-01梁广瑞莫胜撼
梁广瑞,莫胜撼
(广西机电职业技术学院,广西 南宁 530007)
一种电磁摆摆幅和周期的控制方法
梁广瑞,莫胜撼
(广西机电职业技术学院,广西 南宁 530007)
针对2013年全国大学生电子设计竞赛J题要求,设计了一套基于单片机系统的电磁摆运动控制装置。通过控制底端位置对称的两个电磁铁的触发时机和脉冲强度实现了摆幅控制,通过控制摆锤周围磁感应强度实现了摆动周期控制。摆幅控制采用非均匀采样周期的积分分离P I D控制算法,周期采用开环控制。实验结果表明,该控制方法取得了良好的稳态和动态性能。
电磁摆;非均匀采样周期控制;积分分离P I D
全国大学生电子设计竞赛是教育部倡导的6大学科竞赛之一,每两年举办一次,影响巨大,吸引了全国众多高校学生参加。竞赛由全国专家组制定命题原则,在广泛开展赛区征题的基础上由全国命题专家统一进行命题。因此每次的竞赛题目具有很大的权威性和启发性,也引导着全国电子信息类专业进行教学改革。
在2013年全国大学生电子设计竞赛中,J题要求设计并制作一套电磁摆运动控制装置,通过设计底端电磁控制装置的结构、磁场控制算法,实现对该摆摆角幅度和摆动周期的控制。该题入手难度较大,需要对控制的本质有较深认识,本文提出了一种非均匀采样周期控制的方法,取得了良好的控制效果,达到了要求的控制指标和性能。
1 总体思路与设计
依据题意与要求,设计了如图1所示的控制装置方案。其中A、B为自制的电磁铁,对称放置在摆锤下方,C为置于底端的一个大型电磁铁。通过单片机控制系统输出PWM,经功率放大后驱动A、B、C三个电磁铁,从而产生磁力控制摆锤摆动。
其中,在摆锤运动到原点位置时,根据摆锤运动方向选择对底端A、B两个电磁铁施加时间宽度为0.15 s的电压脉冲并控制脉冲强度实现摆锤的摆动及其摆幅控制。对于周期控制,在摆幅比较小(燮5°)的情况下,根据单摆的周期公式:

对于大摆角情况[1],有:

其中,
l为等效摆长;
g为等效重力加速度;
φ为摆幅。
分析公式(2),l是不变的,但是等效g可以通过控制C线圈的电流强度改变摆锤周围磁感应强度,改变摆锤的受力,从而改变等效重力加速度,实现了对周期T的控制。
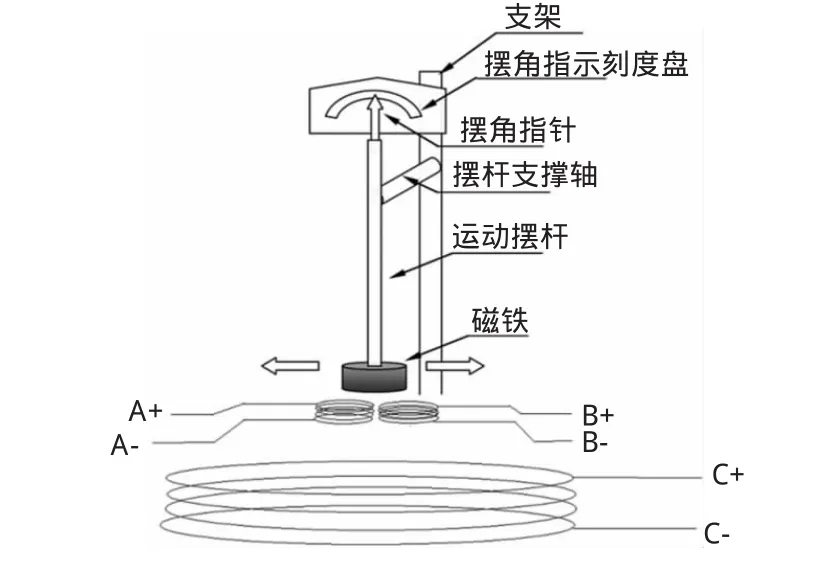
图1 控制方案图
2 硬件设计方案
Stm32系列单片机是意法半导体推出的基于ARM Cortex-M3处理器内核的32位微处理器,集成了包括PWM、定时器、AD、DA、SPI接口等各种外设,由于极高的性能价格比,是目前应用较多的32位单片机 由于其具有多路灵活的PWM输出功能和定时器具有编码器接口模式,非常适合用在本装置的控制上。
如图2所示,本系统采用stm32单片机作为控制芯片,通过L298驱动模块驱动A、B、C3个线圈,在摆杆支撑轴上安装相对编码器检测摆锤的摆动速度和摆幅,采用电阻式触摸屏作为输入和显示元件,实现摆幅、周期和PID参数的设置。图3是线圈的驱动电路原理。

图2 控制装置组成原理

图3 线圈驱动原理图
3 摆幅和周期的控制策略与算法
采用本方法需要注意摆幅和周期之间有强烈的耦合关系。假设线圈A和B施加的脉冲能量累加为E,忽略摩擦所做的功,根据能量守恒定律有:

与前面单摆周期公式比较,可看出如果在控制周期过程中改变了等效g,则会影响摆幅,因此本系统可看成一个2输入2输出控制系统,并且两个控制回路之间有较强的相互耦合关系。经过实验,如果两个回路分开独立进行反馈控制,发现难以同时控制,摆幅和周期出现比较长时间的震荡才能达到稳定。如果采用解耦控制算法,由于控制对象的非线性以及难以建立准确的数学模型,处理比较麻烦[3]。因此本文采用了比较简单的方法,对周期采用开环控制,对摆幅采用反馈控制。这样确定好g之后,周期就确定了,对于摆幅控制所产生的输出并不反过来影响周期控制。
摆幅的控制策略为,在摆锤摆到原点位置时,根据摆动的方向给A、B电磁铁施加0.15 s时间长度的PWM电压信号。当摆锤由左向右摆动到0角度时,A触发,当摆锤由右向左摆动到0角度时,B触发。摆锤在摆动过程中单片机不断读取编码器角度信号,并记录当前角度最大值,摆动到最大角度后(当前采样的角度绝对值比前一次小,则前一次采样的角度为摆动最大角度)将该角度最大值与摆幅设定值作比较得出摆幅偏差ε,根据控制算法计算控制输出的占空比,当摆动到0角度时,A或B才输出0.15 s时长的PWM信号。为了减少超调,避免系统引起较大震荡,控制算法采用积分分离PID,算法如下[4]:

式中,β为积分项的开关系数。
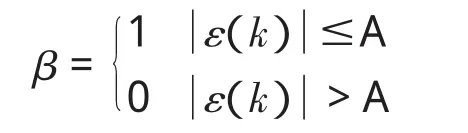
式中,A为根据实际调试情况,人为设定的阈值。
由于每次控制输出信号是在摆锤摆到0角度时计算控制输出的,在摆动一周期中可以进行两次摆幅调整,由于每次的控制采样间隔时间不一定相同,是一种典型的非均匀采样周期控制。
摆动周期的控制采用开环方法,根据题目要求,以 5°为间隔,记录摆幅在10°~45°时,在 0.5 s、1 s、1.5 s周期下的电压方向和占空比,根据设定,将这些记录值作为控制输出即可,不在记录范围之内设定的控制周期则取离记录的最近值进行输出。
控制流程用有限状态机表示如图4所示,可以据此方便编程实现[5]。

图4 控制流程的有限状态机
4 实验结果与分析
在实验过程中,摆锤的自然周期约为0.8 s左右,要控制周期延长,需要C线圈对摆锤磁铁产生斥力效果,即减少等效重力加速度g,但是实验表明,控制摆动周期时间过长时(>1.5 s),摆锤的摆动将不稳定,如果控制输出的斥力作用足够大,摆杆容易停止在一些角度位置,并且C线圈也需要通过较大电流。如果控制摆动周期比自然周期时间短,即C线圈对摆锤磁铁产生吸力效果情况下,摆锤的摆动会比较自然流畅。因此为了更好控制摆动周期,在摆锤另一端适当增加一点重物,可以在一定范围内有效增加自然周期。其基本原理在于摆动过程中附加重物所产生的转矩与磁铁摆锤所产生的转矩方向总是相反,并且增加了整个摆杆的转动惯量,因此总的效果将会延长摆动周期。
作为典型,在设定周期1.2 s,摆幅30°时,摆动轨迹曲线图如图5所示。

图5 摆动轨迹曲线图
从图上看出,第一次摆动有微小超调,经过4到5个周期(8到10拍控制)之后,摆动就稳定在设定值,由于周期是开环控制,周期比较稳定。
5 结束语
本系统采用编码器检测摆锤位置,经stm32单片机处理后驱动3个线圈控制摆幅和周期,通过触摸屏进行参数的设定和状态的显示,完全实现了系统设计要求。该设计达到并超过了题目要求的控制性能,证明控制方法是有效、实用的。本装置的设计思路对于理解数字控制算法有很好的启发作用。
[1]孙会娟,张 宁.大角度单摆运动的周期研究[J].北京联合大学学报:自然科学版,2006(12):71-73.
[2]马 平,杨金芳,崔长春,等.解耦控制的现状及发展[J].控制工程,2005(2):97-100.
[3]刘金琨.先进PID控制MATLAB仿真[M].第三版.北京:电子工业出版社,2011:27-31.
[4]刘媛媛.51单片机用有限状态机算法实现顺序控制[J].机械工程与自动化,2011(4):42-44.
One Kind of ControlMethod AboutDeflection and Period of Electromagnetic Pendulum
LIANGGuang-rui,MO Sheng-han
(DepartmentofElectricalEngineering,GuangxiTechnologicalCollege ofMachinery and Electricity,Nanning 530007,China)
According to the question J of National Undergraduate Electronic Design Contest in 2013,A set of electromagnetic pendulum based on the MCU control system was designed.Themaximum deflection of pendulum was controlled by the trigger time and pulse strength of two electromagnetswhich were installed symmetrically at the bottom side.The period of pendulum was controlled by themagnetic induction around it.The integral separate PID control arithmetic which the sampling period was nonuniform was used in the deflection control,and the period controlwas an open loop method.The experiment shows that the controlmethod can lead to good steady-state and dynamic state performance.
theelectromagnetic pendulum;nonuniform sampling period control;integralseparate PID controlarithmetic
TP271
B
1672-545X(2014)04-0072-03
2014-01-03
梁广瑞(1979—),男,广西南宁人,讲师,工程师,硕士,主要从事计算机控制方面的研究与教学工作。