舰炮武器系统功能重组框架设计
2014-02-27胡文军周德超邱千钧
胡文军,周德超,邱千钧
舰炮武器系统功能重组框架设计
胡文军,周德超,邱千钧
(海军工程大学电子工程学院,武汉 430033)
为实现舰炮武器系统功能动态重组,论文提出了动态重组框架,整合舰炮武器系统的资源,实现对舰炮武器系统功能的动态管理和配置,最后给出了舰炮武器系统功能的动态重组流程。功能动态重组对舰炮武器系统具有一定的军事意义。
舰炮武器系统 动态重组 构件
0 引言
高技术战争条件下的海战场具有环境复杂、任务多样化等特点,要求舰炮武器系统[1]具备功能重组能力,能够根据作战需求和资源状况,动态调度武器系统功能构件[2],以最佳的配置方案完成任务。例如,随着我海军使命任务的扩展,我水面舰艇将可能长时间处于远海,在没有保障基地的支持下执行任务,当系统中某些设备或者功能模块发生故障时,可以通过功能动态重组[3],使故障设备或模块的功能在其他部位得以实现。
1 框架设计
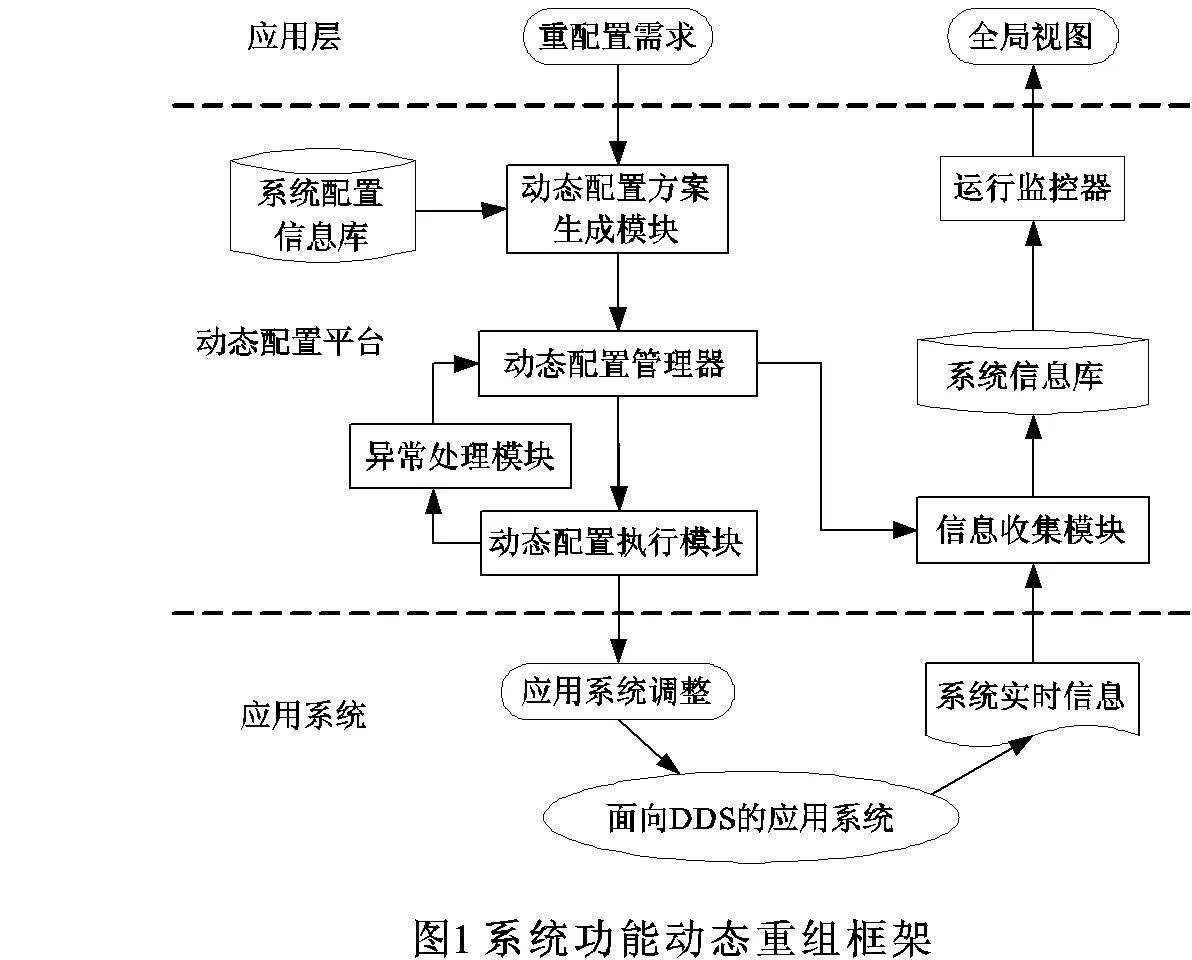
根据系统功能动态重组的需求,本文设计了一个系统功能动态重组框架,如图所示。该框架通过对构成系统的软件构件进行管理和调度,实现对系统功能的动态配置[4]与管理。该框架共分为三层,最上层为应用层,其功能是实时显示运行中的应用系统的软件结构。中间层为动态配置平台,其功能是对配置方案进行生成、分析和执行;最低层是由构件组成的面向数据分发服务(DDS)[5]的分布式应用系统。
动态配置平台主要包括系统配置信息库、配置方案生成模块、动态配置管理器、配置方案执行模块、异常处理模块、系统信息收集模块、系统信息库、运行监控器。
1)系统配置信息库:存储系统所有可用构件的信息和典型应用背景下的配置方案,用于支持管理员和配置方案生成模块进行配置方案生成。
2)配置方案生成模块:在分析管理员输入系统配置命令的基础上,从系统配置信息库中获取可用构件信息和典型配置方案信息,生成多个系统候选配置方案,对各个候选配置方案进行功能完整性检查并剔除存在功能完整性缺陷的方案,调用方案评估算法对候选方案进行评估,最后由管理员通过人机交互界面确定系统配置方案。
3)动态配置管理器:是整个平台的控制中心。动态配置管理器从配置方案生成模块获取系统配置方案,分析系统配置方案,并将其分解为基本的构件配置动作,形成动态配置动作表。它还对系统信息收集模块进行管理,在动态配置前后通知系统信息收集模块对系统信息进行更新。
4)配置方案执行模块:包括构件配置算法库和构件配置算法生成器。根据相应的构件配置动作并结合系统信息库中的系统结构信息产生相应的配置算法,并将完成构件配置操作,实现应用系统的更新。
5)异常处理模块:负责构件配置操作失败的情况处理。通常情况,在构件配置动作合法的条件下,生成动态配置算法,结合系统信息库提供的系统及构件信息,进行相应的构件配置操作是安全可靠的。此模块根据数据库事务原理[6],在构件配置前记录系统状态信息,如出现异常情况,强行恢复构件配置前状态,并发送构件配置失败的标志给动态配置管理器,保证系统安全运行。
6)系统信息收集模块:负责整个应用系统的信息收集,并存放在系统信息库中。接受动态配置管理器的调度,根据动态配置管理器对产生的构件配置动作的分析来调度信息收集模块的运行。
7)系统信息库:存放了应用系统的全部信息,这些信息是动态配置实施的数据基础。8)运行监控器:负责将实际应用系统的体系结构信息提交给人机交互界面,以直观、简单的形式显示出来,同时在此过程中对动态配置进行实时监控,在判定配置动作不合法和系统功能状态发生改变的情况下向管理员发出告警信息。
在上述系统体系结构中,各个模块的关系如下:系统信息收集模块将收集到的应用系统和构件的相关信息存储在系统信息库中。运行监控器通过系统信息库获取系统当前运行状态信息,获得应用系统的全局视图,并对其进行实时监控。在判定配置动作不合法和系统功能状态发生改变的情况下向管理员发出告警信息。在作战任务和资源情况发生变化或者系统发生故障的情况下,管理员向系统发出功能重组指令。配置方案生成模块根据管理员的指令和系统配置信息库中的可用构件信息,与管理员人机相辅的制定系统配置方案。动态配置方案首先以XML[7]描述的方式传递给动态配置管理器,动态配置管理器根据动态配置方案描述,生成动态配置动作表,保证配置方案的合法性。动态配置执行模块在适当时机调控构件行为,执行动态配置动作。
2 系统动态重组流程
前面对系统动态重组框架进行了设计,下面对舰炮武器系统功能动态重组整个流程进行分析,主要包括六个部分:触发动态重组动作;生成候选配置方案;候选配置方案优选;生成动态配置动作表;动态配置动作表合法性检查;执行动态配置。系统重组流程如图2所示。
1)触发系统功能动态重组动作
系统功能动态重组由系统管理员发起,管理员发起的系统动态重组的主要原因如下:
系统的作战任务发生变化。系统一般情况下处于缺省状态,当系统的作战任务发生变化时,如由对海兼顾对岸转为对岸火力支援时,需要对系统的功能进行动态重组。
系统的作战资源发生变化。当系统正在执行某一作战任务时,系统的作战资源发生变化,主要包括:目标指示信息源发生变化;传感器资源发生变化;弹药资源的变化;作战系统根据当前作战任务需要对本系统的作战资源进行调整等。
系统自身的功能状态发生变化。主要指系统在执行任务主要包括以下情况:系统中某个设备或模块故障,需要将其功能迁移到其他设备或者模块;系统构件体系中某个构件存在缺陷发生软件故障,需要对其进行替换等。
2)生成候选配置方案
当管理员需要启动系统功能动态重组动作时,通过图形显示交互界面调用配置方案生成模块,生成系统功能重组的候选配置方案,主要过程如下:
a)管理员通过图形显示交互界面输入系统功能重组的命令信息,包括功能类型、功能模块构成、输入条件参数、系统需要达到的指标要求等。
b)配置方案生成模块根据输入的系统功能重组的命令信息,查询系统配置信息库中的典型配置方案信息和系统构件库中可用构件信息,生成系统的候选配置方案。
c)配置方案生成模块按照任务的信息交互流程对候选配置方案进行功能完整性检查,剔除功能完整性存在缺陷的候选方案。
3)候选配置方案优选
配置方案生成模块调用方案评估算法以作战任务需求和作战资源条件作为输入条件,以系统的精度、反应时间为评价指标,采用模糊综合评判法[7]对各候选配置方案进行评估,并将评估结果通过图形显示交互界面输出。最后,管理员根据作战任务要求和评估结果,选定系统重组配置方案。
4)生成动态配置动作表
系统的重组配置方案需要分解为具体的配置动作才能够执行。配置管理器通过对配置方案进行分析,对比现有的系统配置方案,形成具体的构件基本动态配置动作表。基本动态配置动作包括:构件删除、构件添加、构件更新和构件迁移。
5)动态配置动作表合法性检查
根据信息收集模块收集到的信息,运行监控器对动态配置动作表做合法性检查如下:
a) 添加构件时,主要检查判断目标构件在系统中存在与否,如果存在,则不能进行构件添加操作;如果不存在,则构件添加操作是合法的。
b)删除构件时,主要检查判断目标构件在系统中存在与否,若不存在,则不能进行构件删除操作;若存在,则构件删除操作是合法的。删除构件的过程中必须采用等待方式,使受影响构件集合里的构件的所有请求处理完毕,才能进行删除操作。
c)替换构件时,先检查旧目标构件在应用系统中是否存在,如果存在,还需要检查新旧目标构件的名称和地址是否相同。只有这些判断都正确,才能说明替换构件操作是合法的,否则,不能执行构件替换操作。
d)构件迁移时,主要从以下两个方面分析:旧目标构件存在与否;新目标构件迁移的目标IP地址合法与否。如果以上两个条件都具备,则可以进行构件迁移操作,否则,动态配置动作是不合法的。
当动态配置动作存在不合法时,运行监控器发出警报,转到第一步,重新触发系统功能动态配置动作。
6)动态配置执行
在配置方案分解为构件配置动作表后,由构件配置执行模块根据相应的构件配置动作表产生相应的算法。动态配置平台通过检测构件状态、控制构件行为,执行动态配置算法,最终实现动态配置意图。
3 结束语
本文提出了舰炮武器系统功能动态重组架构,给出了系统功能的动态重组流程。该架构能够有效地整合舰炮武器系统资源,具有动态重组特性,能够适应未来舰炮武器系统作战的需求,具有一定的军事意义。但同时也应看到舰炮武器系统是一个复杂的系统,除了应具有动态重组能力的系统架构,还需要在高速数据传输网络、火控解算等方面进行深入的研究。
[1] 孙续文,汪德虎.基于武器系统工程的信息化舰炮武器系统体系结构研究[C].中国自动化学会第二十五届青年学术年会论文集,2010:271-274.
[2] 夏榆滨,王玲.软件构件技术[M].北京:清华大学出版社, 2011.
[3] 熊伟.支持动态功能重组的协同应用支持系统的研究与实现[D] .武汉:华中科技大学硕士学位论文,2003.
[4] Kramer J, Magee J.Dynamic Configuration for Distributed System [J].IEEE Transactions on Software Engineering, 1985,11(4):424-436.
[5] 谢蓓,刘毅,曹万华,李峻林.实时系统数据分布服务DDS技术综述[J].舰船电子工程,2006(2):16-20.
[6] 王珊,萨师煊.数据库系统概论[M] .高等教育出版社,2006.
[7] 陆新年,陆新宇.XML揭秘——入门到精通[M].北京:清华大学出版社,2001.
[8] 张幸,胡建旺,郝永峰.基于改进模糊综合评判法的系统效能评估[J].电光与控制,2011,18(4):41-44.
Framework of Dynamic Reorganization for Naval Gun Weapon System
Hu Wenjun, Zhou Dechao, Qiu Junqian
(College of Electronic Engineering, Naval University of Engineering, Wuhan 430033, China)
TJ302
A
1003-4862(2014)07-0038-04
2013-11-15
