基于PLC的泵流量控制系统研究
2014-02-26陈明新唐铃凤王玉勤
陈明新 唐铃凤 胡 建 王玉勤
(1 安徽工程大学,安徽 芜湖 241000)
(2 巢湖学院,安徽 巢湖 238000)
1 引言
随着现代工业的不断发展,对泵的流量控制系统的精度要求越来越高。单纯的泵的流量系统由于误差大,控制精度不高,而且不能实时控制泵的流量,需要大量的劳动力,既不能满足工厂生产的实际需要又浪费了大量的劳动力。因此,对泵的流量控制系统的研究是十分必要的,本文基于PLC对泵的流量控制系统进行研究。利用PLC对泵进行研究已经有不少先例,例如:徐州贝斯特公司运用PLC控制混凝土输送泵提高了泵的可靠性;文献[1]介绍了PLC在船舶泵自动控制系统中的应用以及泵控制系统新功能。上述只是对泵的性能以及泵的控制系统新功能进行研究,但是针对PLC在脱硫除尘中泵的流量控制系统的研究目前还没有涉及,本文结合工厂具体生产实际问题,基于PLC对泵的流量控制系统研究,利用s7-200 PLC中自带的PID向导生成PID控制程序,运用PID控制面板实现对泵的流量在线监控,同时采用语句表和梯形图对泵的流量进行控制,不仅提高了泵的流量控制的精度,满足工厂的实际需要,而且实现了自动化控制,节约了时间和成本,提高了作业效率。
2 PLC的泵流量闭环控制系统方框图
西门子产品在国内应用较为广泛,其中s7-200 PLC性价比较高,结构紧凑,在中小型控制系统中占有一定的地位。基于此本文采用s7-200 PLC,PLC的工作方式是循环扫描,在PLC中按照程序的先后顺序执行,CPU从第一条语句开始执行,直到程序结束再次返回到第一条语句,如此周而复始的不断循环[2]。泵的流量控制系统主要由控制器、变频器﹑电机、泵和流量传感器组成。图1是PLC[3]的泵流量闭环控制系统方框图。

图1 PLC的泵流量闭环控制系统方框图
由图1可知:给定值SPn与经模数(A/D)转换后的过程变量PVn相比较形成误差en,通过控制器的处理,经数模转换器把数字信号转换为模拟信号输送给变频器,改变变频器的频率可以改变电机转速,通过改变电机转速改变泵的转速,不仅可以有效的调节泵的流量,还可以提高电机和泵的使用寿命,通过流量传感器检测泵的流量,使过程变量与设定值不断比较,不断地对泵的流量进行校正控制,这样可以提高泵的流量控制系统精度。
3 PID在PLC的泵流量闭环控制系统中的应用
在现代工业生产中,泵的流量控制采用PLC编程结合闭环控制系统实现,现在,很多PLC都自带PID控制功能,例如:S7-200 PID指令。利用PLC中的PID功能可以对泵的流量进行实时控制和自动控制[4],提高泵的流量控制性能。PID是比例环节、积分环节和微分环节的缩写。比例控制是一种最简单的控制,比例环节P的作用是减少误差,其控制器的输出与输入的误差信号成比例;当积分环节存在时,积分环节I的主要作用是提高系统的抗干扰能力,消除静态误差,其控制器的输出与输入的误差信号的积分成正比;当微分环节存在时,微分环节D的主要作用是反映误差的变化率,提高系统的动态特性,其控制器的输入与输出的信号误差的微分成正比。图2是PID 控制结构框图,图2 中 r(t)是输入信号,e(t)是系统误差,u(t)是控制量,c(t)是输出信号。

图2 PID控制结构图
在连续的控制系统中,模拟量是连续变化的,不妨令SPn是给定值,PVn是过程变量,则系统误差e(t)=SPn-PVn,PID控制的输出量=比例环节+积分环节+微分环节+初始值,即:

式中:M(t)—输出值;
Kc—PID的回路增益;
TI—积分时间;
TD—微分时间;
Mi—PID回路的输出初始值。
在利用PLC与PID控制相结合对泵的流量进行控制时,需要把连续的PID控制转化为离散的PID控制,设Ts是采样时间,在t=0时系统开始运行,对式(1)进行离散化,在第n次采样时PID控制器的输出是:
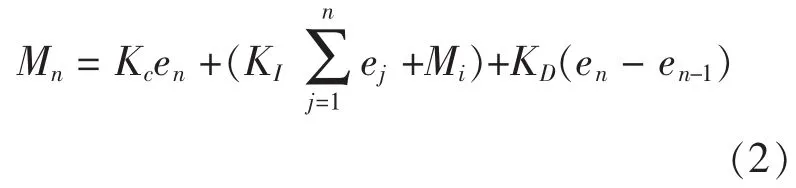
式中:Mn—控制器的输出值;
en—第n次采样的误差;
en-1—第n-1次采样的误差;
Kc—PID回路的增益;
KI—PID回路的积分系数;
KD—PID回路的微分系数。
式(2)可以简化为式(3),在每一次计算时,计算上一次的积分项MX和上一次的误差en-1即可。

PLC结合PID控制的编程,实际上采用的是改进型的PID,其表达式如式(4)所示:

式中:MPn—比例项;
M In—积分项;
M Dn—微分项。
西门子s7-200 PLC中PID的控制依据是根据改进型的PID算法,即式(4)进行编程,能够实现对被控对象的控制,提高泵的流量控制精度。
4 泵流量控制的实验验证
4.1 流量控制的PLC系统接线原理图
图3是PLC系统接线原理图,当通入三相电源时,闭合开关QF1和KM1,变频器和电机起动,同时接入的三相电源经变压器处理给CPU226供电,把编写好的程序下载到CPU226CN中即可实现对泵的流量控制。
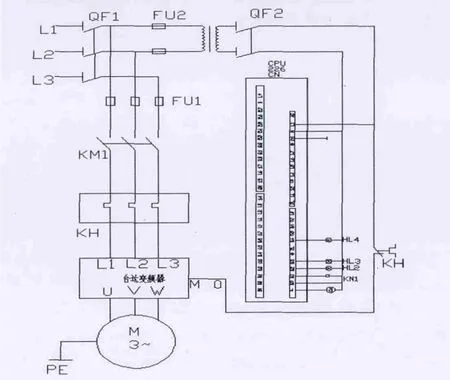
图3 流量控制的PLC系统接线原理图
由图3可知:Q0.0控制变频器的起停;Q0.1控制KM1继电器的通、断电;Q0.2控制工作指示灯泡 (HL2)的通断;Q0.3控制底限报警灯泡(HL3)的通断;Q0.4 控制高限报警灯泡(HL4)的通断。
4.2 PLC的I/O分配表
根据PLC编程的理论知识和泵的流量控制系统接线原理图,编制PLC的输入/输出分配表,具体分配如表1所示:

表1 PLC的I/O分配表
4.3 硬件电路连接
在做PLC硬件电路连接时,需要考虑CPU226自带的24V直流电源是否能满足实验的要求。在本次实验中,用到的模块如下:(1)CPU22 6CN/AC/DC/RLY,(2)1个 4输入的 EM231模拟量扩展模块,(3)1个2输出的EM232模拟量扩展模块。该配置有28个输入端口,18个输出端口(其中数字量输入端口24个,数字量输出端口16个,模拟量输入端口4个,模拟量输出端口2个)。在计算电源的定额时,因为CPU226已经给内部线圈分配了所需要的电源。因此,无需计算内部继电器线圈所需的电源[5]。泵的流量控制的电源定额计算如表2所示:
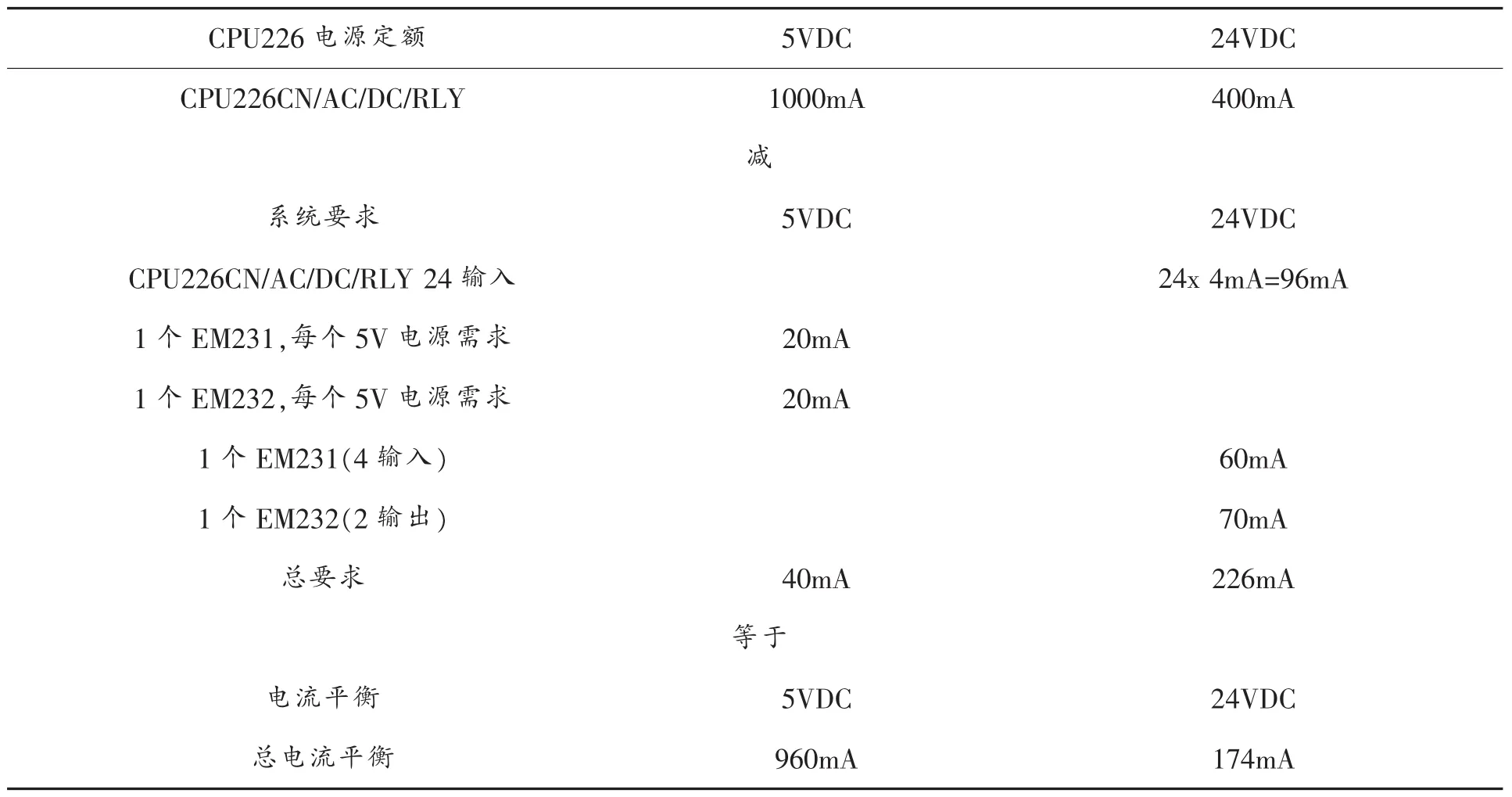
表2 泵的流量控制的电源定额计算
当有扩展模块时,CPU226通过I/O总线为扩展模块提供5VDC,所有扩展模块之和不能大于CPU226提供的电源定额。CPU226自带1个2 4VDC,它可以为本机的输入点、扩展模块的输入点等提供24VDC。当超过电源定额时,可以外接1个24VDC给扩展模块供电。由表2可知:CPU2 26内部的5VDC提供的电流是1000mA,系统要求5VDC的电流是40mA,剩余960mA;CPU226自带的24VDC提供的电流是400mA,系统要求24VDC的电流是226mA,剩余174mA。均在提供的电流范围内,故上述模块的选择是合理的。
合理确定电路系统接线原理图、I/O分配表以及计算电源定额满足系统要求之后,需要根据系统接线原理图连接硬件电路,并根据现场情况进行调试和安装,确保硬件电路连接的正确性。泵的流量控制系统PLC的硬件电路连接图如图4所示:

图4 硬件电路连接图
4.4 程序编写
为了减少PID程序编写的难度,V4.0 STEP 7 MicroWIN SP6软件自带有PID向导生成面板,按照操作步骤即可完成对PID程序的编写。PID控制程序如图5所示:PV-I对应的是AIW0模拟量输入信号,Setpion对应的是设定值 (百分比),Output对应的是AQW0模拟量输出信号。
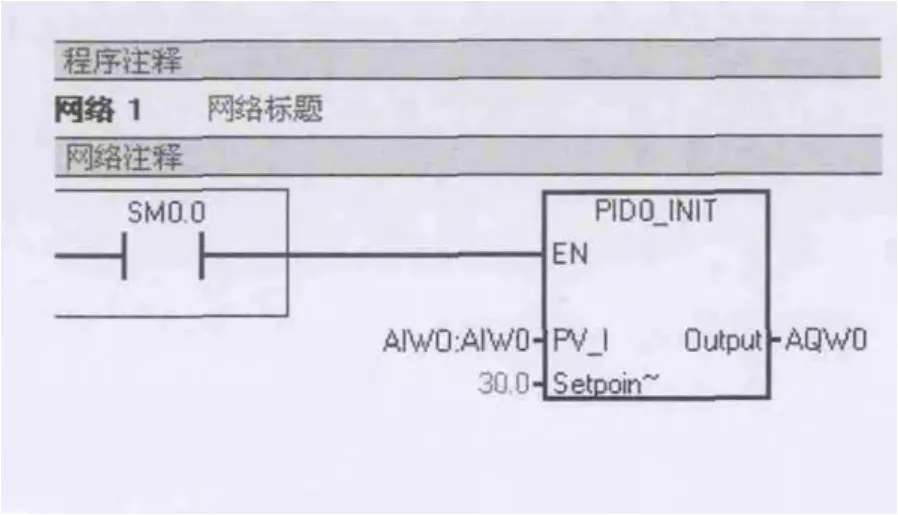
图5 PID向导生成的PID程序
在用PID向导生成PID控制程序之后,可以用PID调节控制面板监视PID控制回路,图6是PID自整定过程的波形图,当点击开始自动调节按钮,开始对PID进行自整定,当自整定结束后,会生成自整定之后对应的相关的PID参数。
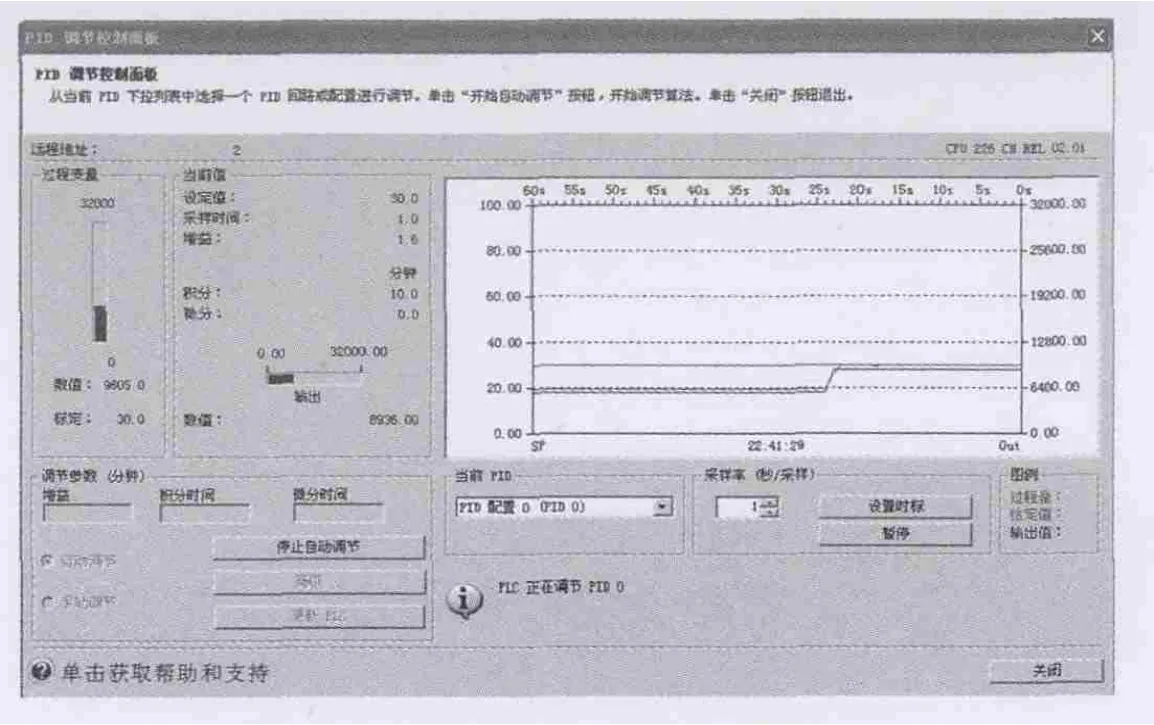
图6 PID自整定过程的波形图
由图6可知:在自整定的过程中过程变量不断逼近设定值,直至达到系统要求,实现对泵的流量的在线自整定。上述是用PID控制面板实现在线监控,达到控制泵的流量的效果。在实际操作中,由于设备干扰和配置原因等可能造成上述方法运用不是很理想。下面是通过基本的编程,实现对变频器频率的控制,变频器频率的改变可以改变电机的转速,电机转速的改变,可以改变泵的转速,进而改变泵的流量。当模拟量输入时,需要根据实际情况,转化为对应的泵的流量,这样便于观察,同样模拟量输出也可按照模拟量的转化依据进行转化。具体转化公式为:

式中:Ov—转换结果;
Iv—转换对象;
Osh—转换结果高限;
Osl—转换结果低限;
Ish—转换对象高限;
Isl—转换对象的低限。
根据式(5)可以把模拟量输入转换成对应的实际的流量,这样更直观的观察实验现象。根据PLC编程中的语句表和式(5)把模拟量输入转化成对应的实际值的程序如下所示[6]:
Network 2
LD SM0.0
-R #Osl:LD10,#Osh:LD6
-I#Isl:LW4,#Input:LW0
ITD #Input:LW0,LD18
DTR LD18,LD22
*R LD22,#Osh:LD6
-I#Isl:LW4,#Ish:LW2
ITD #Ish:LW2,LD18
DTR LD18,LD22
/R LD22,#Osh:LD6
+R #Osl:LD10,#Osh:LD6
MOVR #Osh:LD6,#Output:LD14
根据式(5)把变频器的频率转化成对应的模拟量输出信号数值,具体的转化语句表如下所示:
Network 2
LD SM0.0
-I#Osl:LW14,#Osh:LW12
ITD #Osh:LW12,LD18
DTR LD18,LD22
-R #Isl:LD8,#Input:LD0
*R #Input:LD0,LD22
-R #IslD8,#Ish:LD4
/R #Ish:LD4,LD22
ROUND LD22,LD18
DTI LD18,LW26
+I#Osl:LW14,LW26
MOVW LW26,#Output:LW16
上述是对模拟量输入/输出的转换,当模拟量输入在设定值范围内时,满足实际工作要求,当不在设定值范围时,需要通过比较,自动调节变频器频率,使实际流量输出在设定值范围内。
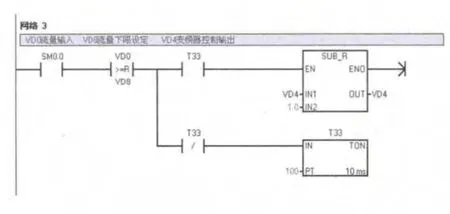
图7 流量下限梯形图

图8 流量上限梯形图
图7和图8分别是流量下限梯形图和流量上限梯形图[7]。此编程使泵的流量在设定范围内,通过编程和现场调试,两种方法均能控制泵的流量在允许的范围内。达到了控制泵的流量的目的。
5 结论
通过PLC的泵流量闭环控制系统方框图分析,得出流量控制的 PLC系统接线原理图,根据系统接线原理图对硬件进行连接、编程和现场调试。结果表明:基于PLC编程的两种方法对泵的流量控制是可行的,不仅提高了泵的流量控制的精度,满足工厂的实际需要,而且实现了自动化控制,节约了时间和成本,提高了生产效率。
[1] 曹京生.PLC在泵自动控制系统中的应用[J].电工技术与自动化,2003,(4):77-79.
[2] 王曙光,魏秋月,张高记.S7-200PLC应用基础与实例[M].北京:人民邮电出版社,2007.
[3] 蔡滨,吴禄慎.基于PLC双闭环控制供水系统的研究[J].计算机与现代化,2010,(2):124-126.
[4] 廖常初.PLC编程及应用[M].北京:机械工业出版社,2002.
[5] S7-200可编程序控制器系统手册[Z].北京西门子培训中心,2004.
[6] 苗涛,曹云东.利用 PLC 模拟量控制伺服电机转速[J].科技信息,2008,(7):82-82.
[7] 肖丽仙.顺序控制设计法在PLC编程中的应用[J].动化技术与应用,2013,(2):42-45.