稀疏超完备车辆识别与统计
2014-02-21娄亚飞刘奉哲李玉松黄石磊汤玉合
逯 鹏, 娄亚飞, 刘奉哲, 李玉松, 黄石磊, 汤玉合
1.郑州大学电气工程学院,郑州450001
2.中电投河南公司技术信息中心,郑州450016
自动准确稳健的车辆识别与统计是智能交通系统(intelligent transportation systems,ITS)领域中的关键技术[1].目前车辆的识别与统计[2]是基于计算机视觉完成的,典型算法[3-4]包括背景差法、边缘检测法、帧差法等.已经成熟的系统有美国PEER公司的VideoTrack-910系统和清华紫光的VS3001检测系统等.然而,由于车辆类别、大小、形状的多样性,环境和背景条件的复杂性,以及阴影、光照和摄像头抖动等对检测设备的影响等因素,车辆检测中的准确性和稳定性受到影响.背景差分法对外界环境条件要求高,且需要背景实时更新;边缘检测法对色彩较暗或阴影造成的车辆边缘模糊易引起漏检;帧差法对车辆换道或检测车道检测窗被覆盖的情况会引起误检.随着媒体数据量的增加,基于计算机视觉的计算复杂性呈指数增长.
视觉系统仅用极少量的神经元就能捕获外界环境海量信息中的关键特征[5].稀疏超完备表示机制[6]是其核心信息处理机理之一,即用少量非零响应稀疏系数就可以表达图像的内在结构和本质属性,且其内在的稀疏超完备表示模型有很强的抗干扰能力,鲁棒性强[7],这为基于图像处理的车辆识别提供了新的计算模型.基于该模型可以将车辆识别问题转化为求解目标图像对整体训练样本的稀疏表示问题.
以图像单元作为处理对象,针对超完备所带来的非线性稀疏分解难题,基于能量模型[8],以稀疏性最大化为目标实现感受野W的最优估计.进而模拟视觉同步振荡机制,筛选神经元最佳响应系数,解决求解图像超完备基的稀疏分解系数问题.在此基础上,计算目标和背景图像之间的稀疏响应系数残差ε,依据自适应阈值δ的大小识别车辆,并通过设置虚拟检测线实现车流量的在线统计.多环境(晴天、阴天、有风)状况下的实验结果表明,对连续时间内的车流量检测准确率达到98.89%.
1 稀疏超完备表示与算法
1.1 稀疏超完备表示
基于视觉稀疏表示,图像可以逼近分解为基函数集合分解系数的线性组合

稀疏模型的目标是求解最佳基函数集,使其表示的自然图像最大可能地接近外界自然图像的统计特性[12].然而在超完备集中,由于A不可逆,所以不能再将感受野定义为W=A-1,而且响应系数si的计算也为非线性算法.因此,必须基于能量模型并通过最大化稀疏性来最优估计感受野W,而且采用非归一化对数似然函数定义能量模型
式中,x是观测数据,即图像单个样本数据向量.wi的归一化常数为

式中,Gi为si的对数概率密度,其计算公式为

采用得分匹配[13-14]直接估计线性感受野wk,简化超完备条件Z(W)的计算,定义数据向量的对数密度函数
式中,wk=(wk1,···,wkn)约束为单位形式.m为感受野数量,n为数据维数,根据数据向量的对数密度函数梯度可将得分函数定义为

式中,g=G′.以数据得分函数和模型得分函数的平方距离作为最佳目标函数
式中,T为样本数,于是可将样本表示为X(1),X(2),···,X(T).
以梯度下降学习算法极小化式(6)

式中,学习速率η(t)是负梯度方向步长,由此得到感受野的超完备集表示.
1.2 最佳稀疏响应系数
基于稀疏表示,图像I=W S,可见同一超完备集W下稀疏系数矩阵S与图像等价,从而将不同图像特征的识别转变为如何获得不同目标特征的稀疏矩阵.从神经生理角度来看,视觉系统通过神经元之间同步振荡等特征选择机制,稀疏地响应自然场景中的关键信息.模拟该机制,采用脉冲耦合神经网络(pulse-coupled neural networks,PCNN)模型[15]筛选稀疏响应系数,获得了不同图像的响应矩阵S.
稀疏系数接受来自其他系数的输出Y1,Y2,···,Yk和外部激励信号Sj,经过积分及加权来获得馈送输入信号Fj和神经元连接输入信号Lj

式(9)中,Mkj表示神经元之间的馈送权系数;式(10)中,Wkj为神经元之间的连接系数.将Fj和Lj相乘获得内部活动项

式中,β为连接强度系数.设动态阈值

式中,αθ为θj的衰减时间常数. 将内部活动项Uj与θj匹配,如果Uj> θj,输出时序脉冲序列Yj(n),并将响应系数置1,该系数响应强烈;反之置0,系数不响应,即
1.3 识别算法
识别算法流程大致如下:对背景和目标图像顺序采样,得到图像单元序列;分别提取目标图像单元与背景图像单元的稀疏响应系数,计算目标与背景图像单元的稀疏响应系数残差,将大于阈值的单元判定为车辆的一部分.
算法1识别算法
①输入背景和目标图像顺序采样矩阵Xi;
②对Xi白化,降维并去除局部均值;
③计算背景和目标图像的最佳响应系数S1、S2;
④计算残差ε=|S2i-S1i|,设置自适应阈值
⑤若ε<δ,则为背景单元,并赋值0;
⑥若ε≥δ,则为目标图像中的车辆单元并赋值1;
⑦根据坐标系标识车辆单元;⑧输出识别结果,算法结束.
2 在线车辆识别和统计
车辆识别和统计算法(vehicle identif ication and counting algorithm,VICA)的基本流程如图1所示.
2.1 感受野超完备集
以像素大小为16×16的滑动空间子窗口采样10幅交通图像,得到50000个图像单元,并将其转为列向量X,其维数为256×50000;然后对X进行白化,去除局部均值,降维得到28×50000的数据集合.基于能量模型和得分匹配进行训练,得到的512维感受野超完备集W如图2所示.

图1 车辆识别和统计算法的基本流程Figure 1 Basic idea of VICA

图2 感受野超完备集Figure 2 Receptive field super perfect set
在感受野超完备集的基础上筛选图像单元的最佳响应系数,得到单个图像单元的响应如图3所示.
2.2 车辆识别
采用窗口为16×16对背景图像进行顺序采样,依次按从左到右、从上到下的顺序采样得到1024图像单元序列.计算背景图像的稀疏响应系数,以PCNN筛选最佳响应系数作为图像本质特征,建立背景图像的特征库,如图4所示.选取某市公路上的视频图像并进行灰度处理,基于算法1得到的识别结果见图5中的颜色加深部分.

图3 最佳响应系数筛选Figure 3 Best response coefficient f ilter

图4 背景图像特征库Figure 4 Characteristics library of the background image
2.3 抗干扰
在车辆的识别中,外界环境的干扰(如风、光线的变化,摄像头和阴影的抖动)会对车辆的识别结果带来两种误差:一是将背景单元误判为车辆单元,如图5(b)误差1所示;二是将车辆单元误判为背景单元,如图5(b)误差2所示.
经分析可知这两种误差是独立的.为提高算法鲁棒性,用算法2对算法1中外界干所扰引起的误差进行优化,得到的优化结果见图5(c).
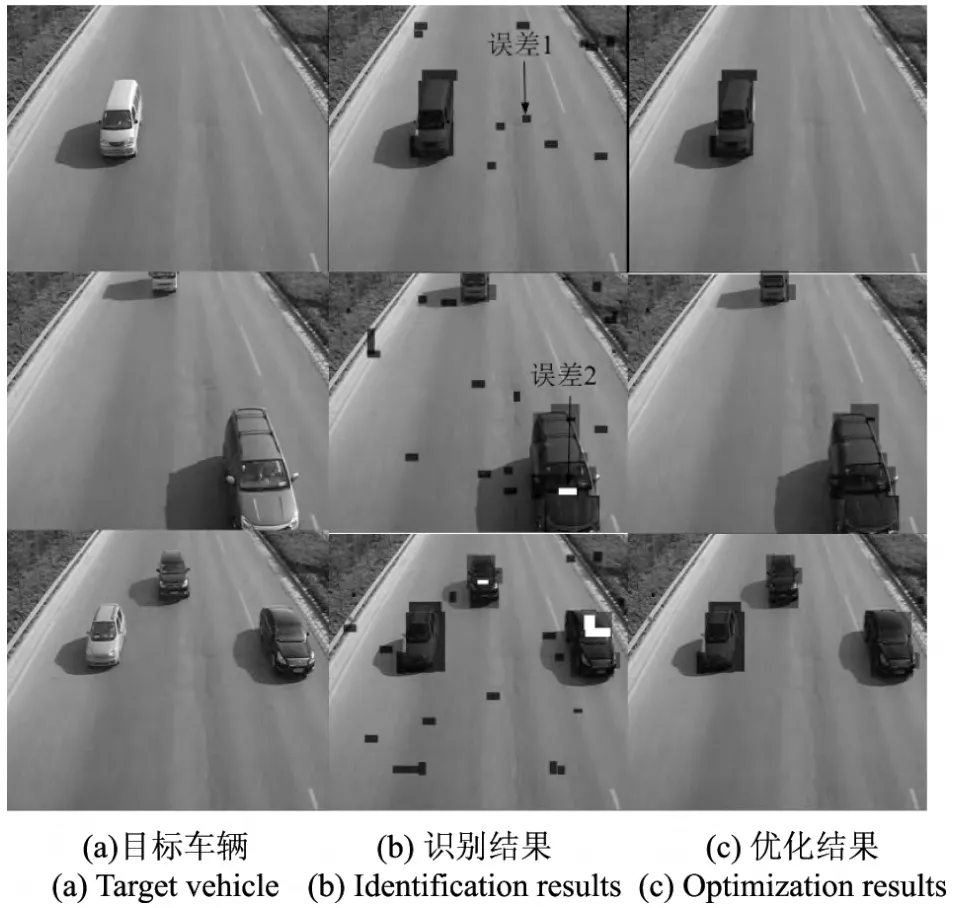
图5 车辆识别与优化结果Figure 5 Vehicle identif ication and optimization results
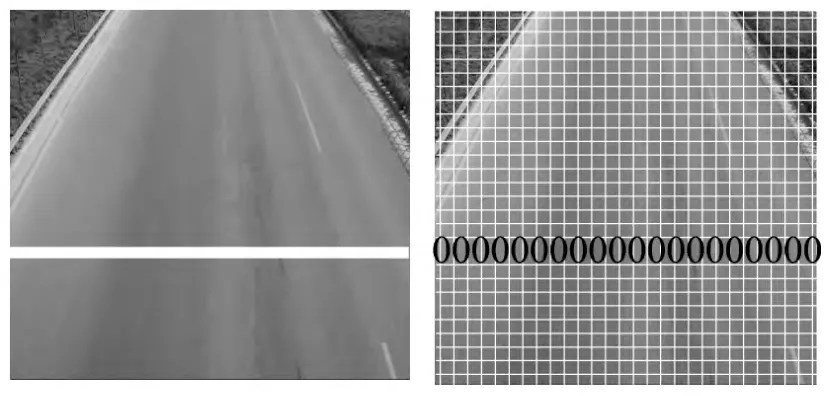
图6 虚拟检测线Figure 6 Virtual test line
算法2优化算法
①输入算法1识别结果;
②对于误差1,若其上下左右有2个以上为0的单元,则判定该单元为背景单元,并将其值置0;
③对于误差2,若其上下左右有2个以上为1的单元,则判定该单元为车辆单元,并将其值置1;
④输出优化结果,算法结束.
2.4 车辆统计
统计算法基本流程,在识别算法的基础上设置虚拟检测线.如图6所示,对道路车辆进行在线统计,并解决车辆并道和跨道行驶的检测准确率问题.
检测线垂直道路的长为道路宽度,宽为采样单元的宽度(16个像素).当运动车辆通过检测线时,检测线单元由背景变为车辆单元,线上连续的0值会变为1值,判定有车辆通过检测线,并把连续1值单元的宽度设置为动态车道,如图7所示,在线统计如算法3所示.
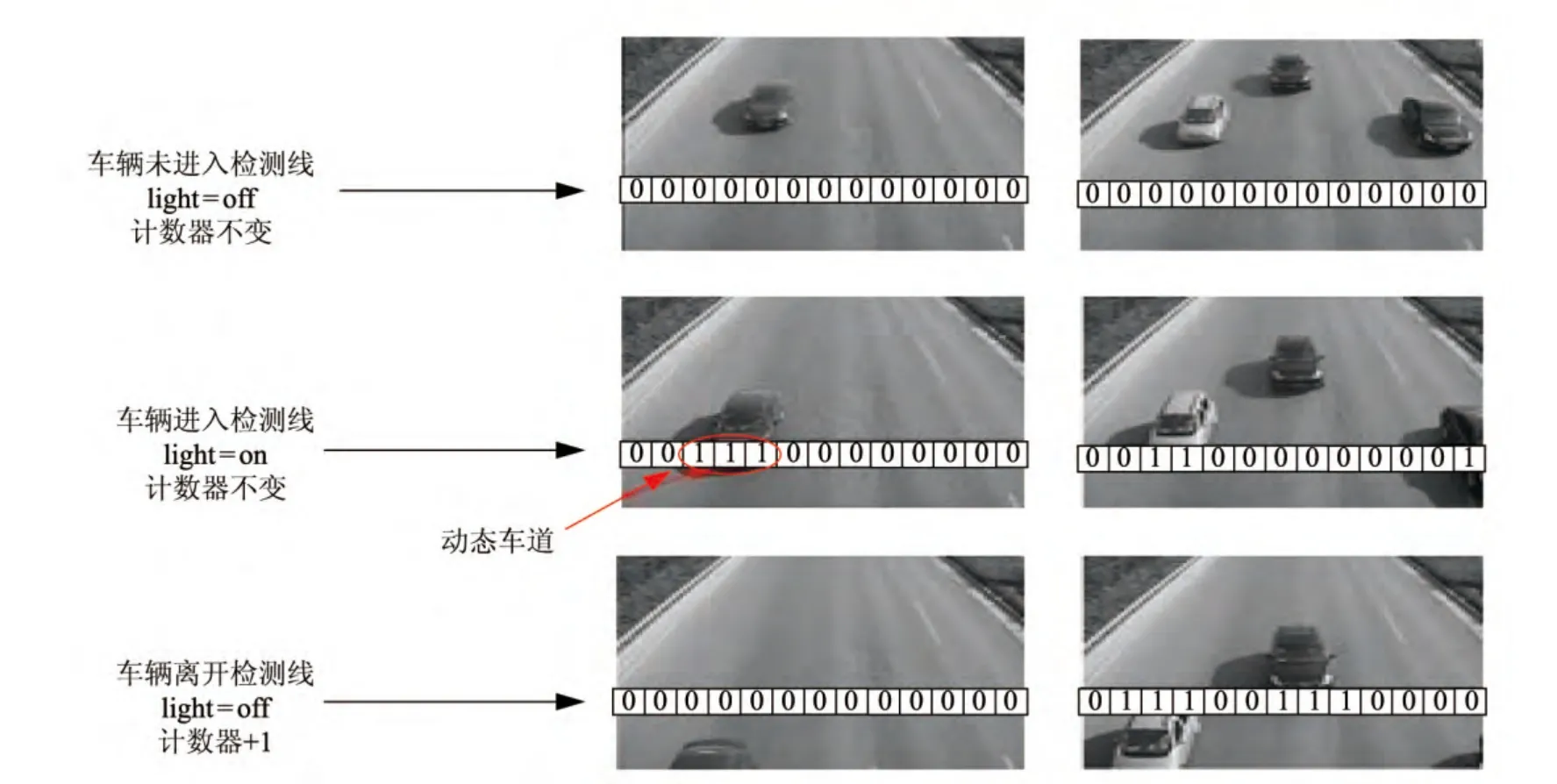
图7 检测线车辆统计Figur e 7 Vehicle counting in line
算法3车辆统计算法
①输入帧序列;
②设置虚拟检测线,记录检测线对应的单元在背景序列的位置.
③扫描检测线,当检测线有连续1值出现时,判定车辆通过,信号状态由“关”到“开”,允许计数器计数;
④检测线值由1变为0时,判定驶出,信号状态由“开”到“关”,计数器加1,算法结束.
⑤输出统计结果
3 实验数据分析
3.1 车辆识别
算法在MATLAB 2010b环境下运行,操作系统:Windows 7,CPU:Intel Core i5 670@3.47 GHz,内存:DDR3 1 600 MHz@4G.
对某市公路分别在晴天、阴天、有风的环境下拍摄3min视频,得到1800帧交通图像,以此测试算法的鲁棒性和统计正确率,得到的实测数据统计结果如表1所示.在晴、阴、有风情况下准确率分别为98.89%、97.65%、96.21%.测试结果表明,当存在光线变化、风引起的扰动等干扰因素时,VICA算法对干扰的敏感性比较弱,适应能力强,能准确地统计车辆,鲁棒性强.
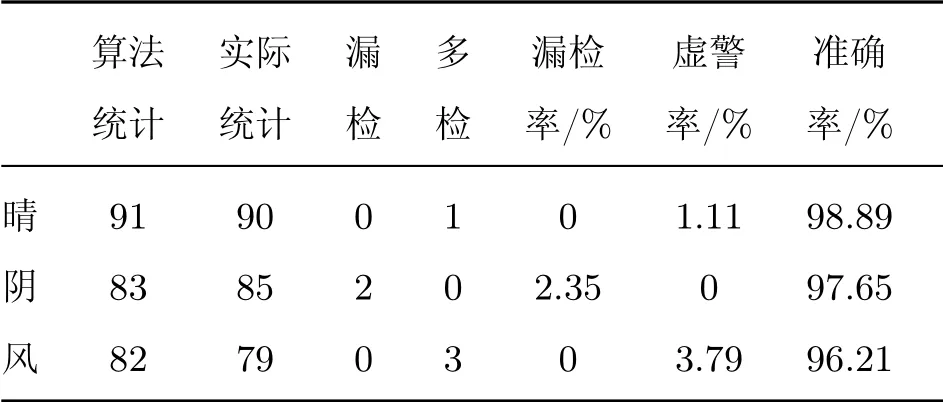
表1 实验结果Table 1 Experimental results
3.2 对比实验
在有风条件下,背景差、边缘检测和VICA算法对比如图8所示.以800帧图像实际通过120个车辆为例,背景差分、边缘检测和VICA算法统计准确率分别为91.67%、90.00%、97.50%.VICA算法基于超完备集提取稀疏系数作为车辆特征,受外部环境影响较小.
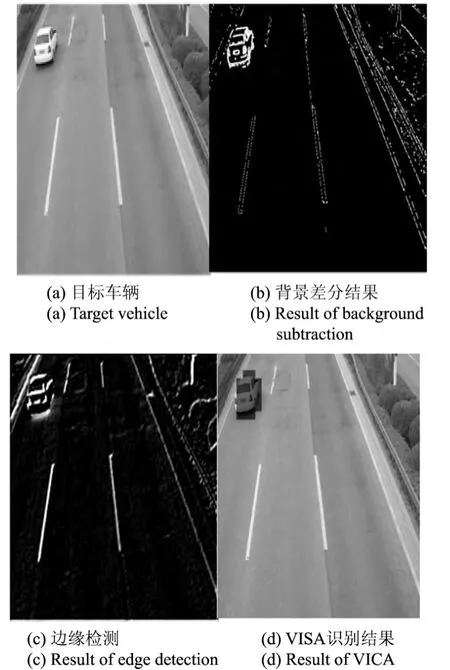
图8 实验对比结果Figure 8 Experimental comparison results
背景差分标识出了车辆以及绿化带和隔离线的轮廓,但由于光线变化、树叶或摄像机抖动造成的干扰等因素,当前帧图像的背景与背景图像有偏差,特别是动态场景.边缘检测方法识别出了车辆的边缘,但对绿化带和隔离带的边缘识别也比较明显,标识出了图像中所有不同的边缘,对识别率造成影响.
4 结语
采用稀疏超完备模型表示车辆的待识别图像,通过对目标图像单元稀疏响应系数残差与自适应动态阈值的对比准确识别车辆;基于虚拟检测线,设置动态车道实现车辆在线统计.实验结果表明,该方法能克服外部环境的干扰准确实现车辆的识别和统计.后续工作是将视觉方法应用到车速检测等方面.
[1]DIMITRAKOPOULOS G,DEMESTICHAS P.Intelligent transportation systems[J].Vehicular Technology Magazine,Institute of Electrical and Electronics Engineers,2010,5(1):77-84.
[2]HEALEY C G.Attention and visual memory in visualization and computer graphics[J].IEEE Transactions on Visualization and Computer Graphics,2012,18(7):1170-1188.
[3]SUN Z,BEBISG,MILLER R.On-road vehicle detection:a review[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2006,28(5):694-711.
[4]张晖,董育宁.基于视频的车辆检测算法综述[J].南京邮电学报,2006,27(3):88-94.
ZHANG Hui,DONG Yuning.Video-based vehicle detection algorithmsreview[J].Journal of Nanjing University of Posts,2006,27(3):88-94.(in chinese)
[5]GUO Shenyu.Image modeling and enhancement via structured sparse model selection[C]//IEEE 17th International Conference,2010,1641-1644.
[6]路锦正,张启衡,徐智勇,彭真明.超完备稀疏表示的图像超分辨率重构方法[J].系统工程与电子技术,2012,34(2):403-408.
LU Jinzheng,ZHANG Qiheng,XU Zhiyong,PENG Zhenming.Image super-resolution reconstruction algorithm using over-complete sparse representation[J].Systems Engineering and Electronics,2012,34(2):403-408.(in chinese)
[7]MEI Xue,LING Haibin.Robust visual tracking and vehicle classif ication via sparse representation[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2011,33(11):2259-2272.
[8]LU Peng,TANG Yuhe,CHEN Eryan,SHI Huige,ZHANG Shanshan.Unstructured scene object localization algorithm based on sparse overcomplete representation[M]//Intelligent Computing Technology.Berlin Heidelberg:Springer 2012:618-625.
[9]YANG Shuyuan,WANG min,WEI Meirong,JIAO Licheng.Evolution-enhanced multiscale overcomplete dictionaries learning for image denoising[J].Engineering Applications of Artif icial Intelligence,2012,25(6):1259-1264.
[10]WEI C,ODRIGUESM R D R,WASSELL I J.On the design of optimized projections for sensing sparse signals in overcomplete dictionaries[C]//Acoustics,Speech and Signal Processing(ICASSP),2012 IEEE International Conference on.IEEE,2012:3457-3460.
[11]ZHANGST,ZHAN Y Q,ZHOU Yan,METAXASD N.Efficient sparse shape composition with its applications in biomedical image analysis:an overview[C]//Biomedical Imaging(ISBI),2012 9th IEEE International Symposium on IEEE,2012:976-979.
[12]DONOHO D L,TSAIG Y,DRORI I,STARCK J L.Sparse solution of underdetermined systems of linear equations by stagewise orthogonal matching pursuit[J].IEEE Transactions on Information Theory,2012,58(2):1094-1121.
[13]WONGY K,HARANDIM T,SANDERSON C,LOVELL B C.On robust biometric identity verif ication via sparse encoding of faces:holistic vs local approaches[C]//Neural Networks(IJCNN),The 2012 International Joint Conference on IEEE,2012:1-8.
[14]YAO B P,BRADSKI G,LI F F.A codebook-free and annotation-free approach for f ine-grained image categorization[C]//Computer Vision and Pattern Recognition(CVPR),2012 IEEE Conference on Institute of Electrical and Electronics Engineers,2012:3466-3473.
[15]WANG Zhaobin,MA Yide,CHENG Feiyan,YANG Lizhen.Review of pulse-coupled neural networks[J].Image and Vision Computing,2010,28(1):5-13.