卡车目标微多普勒建模及特征提取
2014-02-21李开明梁必帅
李开明, 张 群,2, 梁必帅, 罗 迎
1.空军工程大学信息与导航学院,西安710077
2.复旦大学波散射与遥感信息国家重点实验室,上海200433
卡车目标识别具有重要的军事和民用价值[1-5],而特征提取是分类与识别的前提和基础.目前,对卡车目标的识别,民用领域通常采用光学和视频手段在视频图像中进行特征提取和识别[1];军事领域一般根据声波、地震波、电磁波3种方式[2],且主要在信号时域和频域进行特征提取和识别[3-4];对于微波雷达,既可以对包含车辆目标的合成孔径雷达(synthetic aperture radar,SAR)或逆合成孔径雷达(inverse synthetic aperture radar,ISAR)图像进行特征提取[5-6],又可以提取车辆目标的高分辨距离像(high resolution range prof ile,HRRP)[7]、回波谱图[8]、多普勒谱[7-9]、微多普勒(micro-Doppler,m-D)[10-11]等特征进行识别.
目标的旋转、振动等微小运动称为微动,它会产生微多普勒效应.相对于其他特征,微多普勒特征独特而稳健,被认为是目标分类与识别的重要依据[12-15].卡车车轮旋转是典型的微动,相对于履带式车辆,卡车的微动较简单,通常只包含车轮的旋转和由发动机气缸活塞式运动表现出的车身振动,但振动半径极小且频率很高,故不易被雷达感知.
从现有文献来看,针对卡车微多普勒特征提取的研究相对较少,结合微波雷达的卡车三维散射点进行建模分析的更少.文献[11]对卡车进行微动建模,但并未考虑实际中卡车整体的散射效应.传统的微多普勒特征提取方法包括chirplet分解法[12]、经验模式分解(empirical mode decomposition,EMD)[13]、AMLFM分解[14]及Hough变换[15]等,但尚未应用于卡车等地面目标的微多普勒特征提取;且对于卡车等刚体类目标,表面起伏较大,回波的整体散射较强,车轮旋转散射点的微多普勒往往被淹没在车身主体回波内,故难以从回波中提取微多普勒特征.
本文在窄带线性调频信号下针对卡车的微多普勒特征提取展开研究,结合卡车三维散射点模型对目标进行回波建模,分析推导了车身非旋转散射点的多普勒频率和轮毂旋转散射点的微多普勒频率的参数化表示,并根据其特征差异设计相应的原子集,利用匹配分解的方法提取出车轮旋转的微多普勒特征,仿真验证了算法的有效性和稳健性.
1 卡车微多普勒建模
考虑到实际中雷达通常为机载或阵地雷达,对卡车目标通常为俯视扫描.如图1所示,为简化分析,设雷达位于全局坐标场,在全局坐标系中以速度v=[vX,0,0]T平行于X轴前进,初始时刻雷达视线方向(line of sight,LOS)矢量为RLOS,其对应的方位角和掠地角分别为φ和θ.以LOS为y轴建立雷达坐标系x yz,以卡车中心Q为原点建立卡车本地坐标系x′y′z′,此时本地坐标系与全局坐标系平行.图2为卡车本地坐标系示意图,原点Q在全局坐标系中的坐标为(XQ,YQ,ZQ),以卡车后轮为例,Q点到后轮轴心A的距离矢量为R0.由于车轮外缘通常为橡胶材质,散射较弱,而轮毂为金属材质且表面起伏较大,散射相对较强.因此,本文主要考虑轮毂上的旋转散射点.设轮毂中心A在全局坐标系的初始坐标为(XA,YA,ZA),车轮半径矢量为r,轮毂半径矢量为r0,轮毂边缘第n个旋转点A′绕轮毂中心以角速度矢量ω转动,其中ω=vX/‖r0‖=[0,ωY,0],初始相位为βnl0.

图1 卡车与雷达位置关系图Figure 1 Geometry of a radar and truck

图2 卡车本地坐标系示意图Figure 2 Sketch map of local coordinates on truck
根据右手法则有:x=y×Z,z=x×y,记雷达坐标系3个坐标轴在全局坐标系中的单位矢量分别为x0、y0、z0,设^R为雷达坐标系x yz到本地坐标系x′y′z′的旋转变换矩阵.由于x0、y0、z0为相互正交的单位矢量,故为正交矩阵,满足.因此,即为本地坐标系到雷达坐标系的欧拉旋转变换矩阵Rinit,即.
当雷达工作于微波波段时,目标散射特性满足光学区假设,可用散射点模型来近似[18].设卡车三维模型共有K个散射点,在本地坐标系下记为集合,对集合C′通过坐标旋转C=·C′,转换为雷达坐标系下的集合.进一步,设卡车散射点模型由M个车身主体非旋转点Pm(包括轮毂中心)和N个轮毂旋转点Pn构成(K=M+N),设雷达发射线性调频信号,以卡车中心Q为参考点,拉伸处理并去除RVP(剩余视频相位)得[15]

式中,Tp为脉冲宽度,µ为调频斜率.σm、σn分别为第m个非旋转点和第n个旋转点的散射系数,ΔRm(τ)、ΔRn(τ)为第m个非旋转点和第n个旋转点在慢时间τ距参考点的距离.
以卡车中心Q点、轮毂中心A点、轮毂旋转点A′为例,由图1和2可知,这3点在τ时刻到雷达的距离分别为

式中,‖·‖表示欧氏范数.对式(2)进行泰勒展开并忽略高阶项得

式中,RQ(0)为初始时刻Q点到雷达的距离.
同理,设卡车轮毂中心A在卡车本地坐标系的坐标为(xA,yA,zA),则有

式中,RA(0)为初始时刻A点到雷达的距离.
图3为雷达与车轮旋转平面的几何关系图,n为

图3 车轮与雷达几何关系图Figure 3 Geometry of truck wheel and radar
雷达视线单位矢量,n′为雷达视线在车轮旋转平面的单位投影矢量,ω为车轮旋转角速度矢量,其方向垂直于车轮旋转平面向内.当旋转散射点A′绕A点旋转至A′′时,由于卡车处于雷达远场,‖AA′′‖≫ ‖O′A′′‖,且‖AA′′‖≫‖O′A′‖,故有

式中,Ω=‖ω‖=ωY,P1为A′′点在雷达视线方向的投影,ε为雷达视线与角速度矢量ω的夹角,Rw为微动变换矩阵.卡车车轮的主要微动为绕轮轴(即本地坐标系y′轴)的旋转,于是有

同样,对于轮毂中心A有
对于轮毂旋转点A′′,有

将式(1)两边同时取模,即得到卡车散射点的慢时间-距离像序列.在该慢时间-距离平面内,对每个距离单元回波信号的相位关于慢时间τ求导,得到散射点在该距离单元的多普勒频率.则由式(7)和(8)可得,轮毂中心和轮毂旋转点的瞬时多普勒分别为


式(10)的第1项与式(9)相同,为轮毂中心运动产生的多普勒,第2项即为轮毂旋转点相对于轮毂中心旋转产生的微多普勒,即

式中,r0=‖r0‖.可以看出,对于每个距离单元回波信号,轮毂中心的多普勒不随慢时间τ发生变化,而轮毂旋转点的微多普勒表现为慢时间τ的正弦曲线,其基线位置为轮毂中心运动产生的多普勒频率,其幅度与旋转频率、旋转半径及雷达视线方向LOS有关.
在远场情况下,卡车目标的轮毂中心高度、轮毂旋转点高度和卡车车身的高度相对于卡车到雷达的距离是很小的,它对方位角和俯仰角的影响可以忽略不计,可近似认为在同一时刻卡车所有散射点在同一雷达视线方向.则由几何关系可推得ε≈arccos(cosθ·cosφ),由式(11)可进一步推得轮毂旋转半径的表达式.
2 卡车微多普勒特征提取
基于以上分析可知:在慢时间-距离平面内各距离单元的回波经精确的运动补偿后将是多个单频分量和正弦调频分量的线性叠加.传统的信号分解方法,如傅里叶变换、正交小波变换等,都将信号投影到一组完备正交基上,但不能实时灵活地解决具体问题,且计算效能欠佳.随着信号处理理论的发展,信号的非正交分解受到人们的重视.文献[16]首次提出“匹配追踪”(matching pursuit,MP)的方法,将信号分解到一组过完备的非正交基上,以实现对信号特征的高效提取.在此基础上,文献[17]进一步提出“正交匹配追踪(orthogonal matching pursuit,OMP)”的方法,将字典中的原子按施密特正交化方法进行处理,再根据类似MP的方法完成信号的迭代分解,不但实现简单,而且大大提高了算法的计算效能[18].
由OMP算法原理可知,字典中的原子应按照待分解信号的内在特性来构造[18].针对慢时间-距离平面目标回波信号,根据式(9)和(10)设计非正交的原子集G,其中包括单频原子和正弦调频原子.设第k个单频原子和第l个正弦调频原子的表达式分别为

式中,Gk为第k个单频原子的总能量,fck为第k个单频原子的载频,NS为单频原子数目,Gl为第l个正弦调频原子的总能量,fcl、mfl、fml、θ0l分别为第l个正弦调频原子的载频、调制指数、调制频率、调频初始相位,NSM为正弦调频原子数目.
原子集中两类原子各参数及原子数目的选取方法如下:
1)由于车身较长,随着卡车的运动,卡车散射点相对雷达存在一定的转角,导致卡车主体散射点的多普勒并不是一个固定的值,这也是雷达目标ISAR成像的关键.也可以认为,卡车各散射点在雷达视线方向的径向速度存在差异,其多普勒频率必然存在微小差异.以卡车中心为参考点进行运动补偿后,散射点多普勒必有一定的范围,但其中心频率位于零频.因此,单频原子和正弦调频原子的载频搜索范围可由运动补偿后卡车散射点对应的多普勒频率范围确定,于是将多普勒频率范围除以载频的搜索步长,即可得到单频原子数目NS;
2)调制指数mfl的搜索步长选为旋转半径的搜索步长与4π/λ的乘积;
3)调制频率fml搜索范围需尽量包含车轮旋转频率,步长可在保证计算效能的前提下尽量小;
4)调频初始相位θ0l的搜索范围选取为[0,2π),搜索步长的选取只要小于轮毂上旋转散射点的初始相位间隔即可.
根据fcl、mfl、fml、θ0l的搜索范围和步长,可分别计算4个参数对应的数目N1、N2、N3、N4,再将以上4个参数相乘,即得到正弦调频原子的数目NSM=N1N2N3N4.
针对卡车三维散射点模型,首先在慢时间-距离平面设置一定的阈值,提取出回波中能量集中的距离单元,在原子集上对其进行匹配分解.一方面避免了在整个慢时间-距离平面进行匹配分解而增大运算量的问题;另一方面,通过确定散射点回波的多普勒频率范围,可进一步缩小单频原子和正弦调频原子载频的搜索范围和搜索步长,提高分解效率.其次从搜索得到的正弦调频原子中提取出旋转散射点的微多普勒特征:正弦调频分量的载频fcl为车轮旋转中心的多普勒频率,对应轮毂中心在LOS方向的速度大小,调频周期为轮毂旋转点的旋转周期,即T=1/Ω=1/fml,调制指数为mfl=4πr0sinε/λ,进而可得到轮毂旋转半径r0=λmfl/(4πsinε),调频初相θ0l对应起始时刻旋转点的相位βnl0.最后进一步重构出卡车目标的微动特征.
在实际信号处理中,通常将式(1)中的Sc(f,τ)表示为一个矩阵(U×V),其中U为快时间单元数(距离单元),V为慢时间单元数.算法的具体流程如下:
步骤1 计算Sc(f,τ)各距离单元的能量密度Pu=|Eu|/EU,其中Eu(u=1,2,···,U)为第u个距离单元回波能量.EU为慢时间-距离平面回波的总能量,设定相应的阈值ζ,提取出矩阵Sc(f,τ)中能量较为集中的距离单元,得到新的矩阵;
步骤4 设定剩余能量阈值ξ,当分解残余能量小于ξ时即停止投影;对正弦调频原子进行相关处理,提取出车轮旋转的微多普勒特征.
3 仿真验证
仿真采用图4的卡车三维散射点模型,该模型共有19 878个散射点,其中主体有19 850个点,则4个轮子共28个点,每个轮子选取1个旋转中心和6个旋转点,初始相位分别为(0,π/3,2π/3,π,4π/3,5π/3).设卡车沿着图1中全局坐标系X轴方向行进,雷达和目标参数如表1所示.

图4 卡车三维散射点模型Figure 4 Three dimensional scatterers model of truck
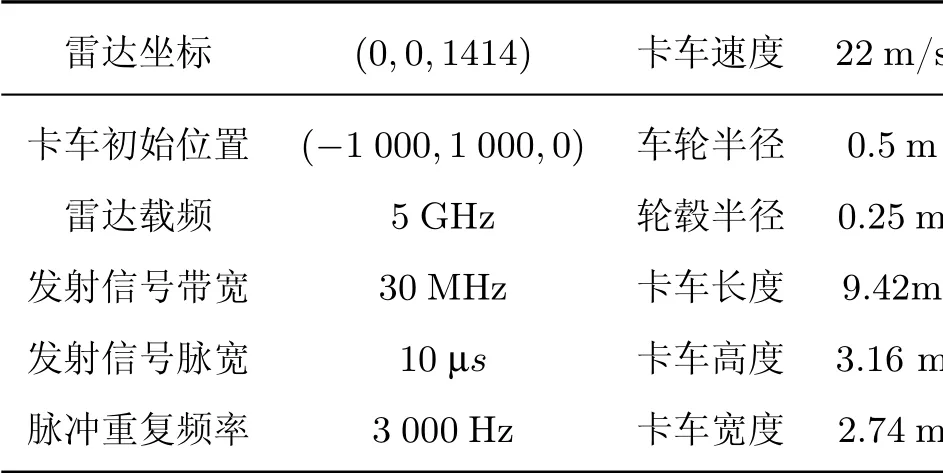
表1 雷达和卡车的参数Table 1 Parameters of radar and truck
假设精确的运动补偿已经完成,对1 s的雷达回波进行分析.图5中的(a)为卡车散射点的慢时间-距离像序列,图(b)为各距离单元的能量密度,选取ζ=0.1作为能量阈值,可见卡车散射点的回波能量集中分布在第32~35个距离单元.

图5 运动补偿后卡车慢时间-距离像、能量分布及时频分析结果Figur e 5 Slowtime-range prof ile,energy density and time-frequency analysis of echoes after moving compensation
使用Gabor变换对卡车散射点回波进行时频分析得到的结果如图5中的(c)所示,可以看出散射点回波的多普勒频率在零频附近分布.同时,由于车身散射点较多且雷达带宽较小,轮毂旋转点的微多普勒在时频平面不易看见.
下面对图5(a)所示的卡车慢时间-距离像从第32~35个距离单元逐次进行匹配分解,然后按照投影系数的大小对原子进行排序.如图5(c)所示,载频的搜索范围为(–3 Hz,3Hz),载频的搜索步长为0.05 Hz,旋转半径的搜索步长为0.025 m,调制指数的搜索步长由4πr0sin/λ及旋转半径的搜索步长确定,调制频率的搜索步长为0.15 Hz,初相的搜索步长为π/12,分解停止的剩余能量阈值设为ξ=0.1.
图6中的(a)和(b)分别是最为相关的5个单频原子和正弦调频原子的时频分析结果,图(a)从上往下依次为第36、37、35、38、34个单频原子,图(b)从上往下依次为第1 596、1 973、1 789、1 207、1 593个正弦调频原子.可以看出,5个单频原子的多普勒中心频率都分布在零频附近(约为–1.3Hz),轮毂旋转散射点的微多普勒在车身主体多普勒两边对称分布,其中最相关的正弦调频原子的最大频率约为fmax≈337 Hz.
利用本文匹配分解方法得到的前6个正弦调频原子的参数见表2,从上到下相关性递减.由于正弦调频原子的载频是轮毂中心的多普勒频率,前后轮中心在参考点(卡车中心)的两侧分布,因此运动补偿后其频率在零频两边分布,与表2第4列搜索得到的数据一致.由表2第6列可以看出,调制频率的搜索结果集中在7Hz附近,其均值≈6.9625 Hz,与车轮真实旋转频率7.003 Hz较为接近.由于方位角φ和掠地角θ均为45°,由ε≈arccos(cosθ·cosφ)可得ε≈60°,同时由式(11)可知正弦调频原子的最大频率fmax满足:fmax=-2Ωr0sinε/λ≈-,经计算得到≈0.2661 m.进一步由表2第5列可以看出,调制指数集中在47.338 6,由r0=λmfl/(4πsinε)可得轮毂旋转半径约为≈0.2 650 m,与值十分接近,与真实半径0.25 m也较接近,从而验证了本文方法的正确性.

图6 匹配分解后前5个相关度较高的单频原子和正弦调频原子时频分析结果Figure 6 Time-frequency analysis of the most correlative single frequency atoms and sinusoidal frequency modulation atoms after Matching Pursuit

表2 检测到的正弦调频分量参数Table 2 Parameters of sinusoidal frequency modulation atoms after decomposition
为进一步验证算法的计算效率,在(CPU:Inter R3 2.93 GHz,L2 Cache:2 MB,内存:4 GB)硬件条件下进行测试,仿真表明匹配分解耗时仅184.98 s,获得了较高的计算效能.
最后对算法的稳健性进行仿真.在回波中分别加入0 d B和-5 d B高斯白噪声(Gaussian white noise,GWN),图7分别为加入高斯白噪声后回波的慢时间-距离像序列,可见回波受到较大污染.
图8 (a)中最相关的正弦调频原子的最大频率为fmax≈334 Hz,调制频率的搜索结果集中在6.85 Hz附近,其均值≈6.840 3 Hz,经计算得到轮毂半径≈0.27 m,与未加噪声前较为接近;图8(b)中最相关的正弦调频原子的最大频率为fmax≈332 Hz,调制频率的搜索结果集中在6.7Hz附近,其均值≈6.613 9 Hz,经计算得到的轮毂半径为≈0.2769 m,仍然与真实值较接近,可见该方法具有较强的抗噪性能.以上仿真表明,在窄带线性调频信号下,针对卡车三维散射点模型进行微多普勒特征提取的方法是有效而稳健的.
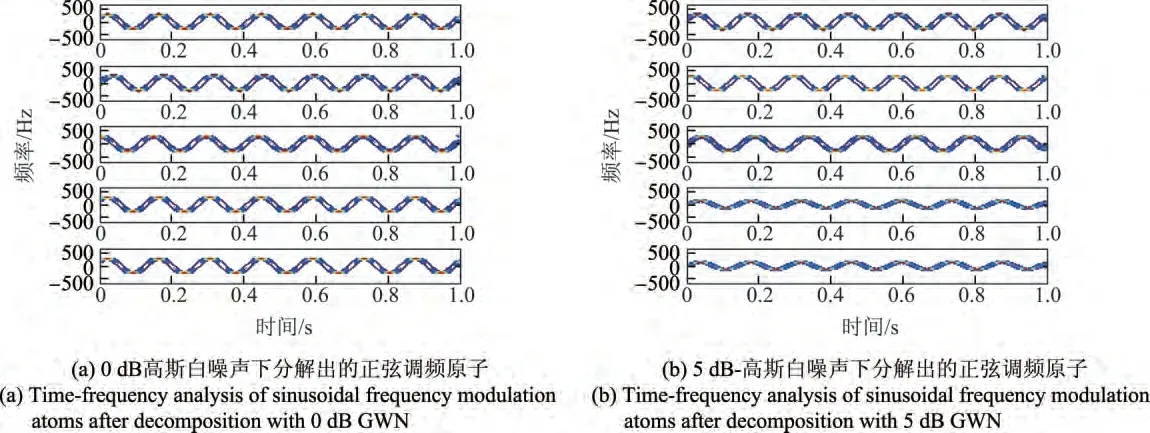
图8 加入高斯白噪声后分解出的正弦调频原子Figure 8 Sinusoidal frequency modulation atoms after decomposition with GWN
4 结语
车轮旋转的微多普勒特征是卡车重要的识别特征之一.在窄带线性调频信号体制下,基于三维散射点模型对卡车车轮旋转的微多普勒进行建模分析,推导了非旋转点多普勒及轮毂旋转点微多普勒的数学表达式,并基于两者的差异采用匹配分解的方法,在慢时间-距离平面有效提取了卡车轮毂旋转半径、旋转频率等微多普勒特征信息,为卡车等轮式车辆的分类与识别提供了参考和依据.
[1]ZHAN Wei,LUO Zhiqing.Research of vehicle type recognition system based on audio video interleaved f low for toll station[J].Journal of Computer,2012,4(7):741-744.
[2]张河.探测与识别技术[M].北京:北京理工大学出版社,2003.
[3]林岳松,陈琳,郭宝峰.基于数据驱动的信息融合及其在车辆声辨识中的应用[J].电子与信息学报,2011,9(33):2158-2163.
LINYuesong,CHENLin,GUOBaofeng.A data-driven fusion and its application to acoustic vehicle classif ication[J].Journal of Electronics&Information Technology,2011,33(9):2158-2163.(in Chinese)
[4]陈珅培,王曙光,宁全利.一种基于炮射地面震动传感器的目标识别算法研究[J].弹箭与制导学报,2011,2:185-188.
CHENShenpei,WANG Shuguang,NINGQuanli.The study of gun-launched ground vibratiuncle sensor recognition arithmetic[J].Journal of Project Rockets Missiles and Guidance,2011,31(2):185-188.(in Chinese)
[5]潘卓,高鑫,王岩飞,王宾辉,谢建红.SAR场景图像中车辆目标的自动识别[J].系统工程与电子技术,2009,31(7):1596-1601.PAN Zhuo,GAO Xin,WANG Yanfei,WANG Binhui,XIE Jianhong.Automatic vehicle target recognition in full SAR image scenes[J].System Engineering and Electronics,2009,31(7):1596-1601.(in Chinese)
[6]MARTORELLA M,GIUSTI E,BERIZZI F,MESE E D.Automatic target recognition of terrestrial vehicles based on polarimetric ISAR image and model matching radar[C]//The International Conference on Radar Proceedings.Adelaide,Sept,2-5,2008:38-43.
[7]廖东平.支持向量机方法及其在机载毫米波雷达目标识别中的应用研究[D].长沙:国防科学技术大学,2006.
LIAO Dongping.Study on support vector machine method and its application in target recognition for airborne MMW radar[D].Changsha:National University of Defense Technology,2006.(in Chinese)
[8]ERYILDIRIM A,ONARAN I.Pulse Doppler radar target recognition using a two-stage SVM procedures[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(2):1450-1457.
[9]方菲菲,余稳.基于PCA-LDA-SVM的多普勒雷达车型识别算法[J].数据采集与处理,2012,27(1):111-116.
FANG Feifei,YU Wen.Vehicle recognition algorithm with Doppler radar based on PCA-LDA-SVM[J].Journal of Data Acquisition&Processing,2012,27(1):111-116.(in Chinese)
[10]SMITH G E,WOODBRIDGE K,BAKER C J.Radar micro-Doppler signature classif ication using dynamic time warping[J].IEEE Transactions Aerospace and Electronic Systems,2010,46(3):1078-1096.
[11]李彦兵,杜兰,刘宏伟,丁苏颖,关永胜.基于微多普勒特征的地面目标分类[J].电子与信息学报,2010,32(12):2848-2853.
LI Yanbing,DU Lan,LIU Hongwei,DING Suying,GUAN Yongsheng.Ground targets classif ication based on micro-Doppler effect[J].Journal of Electronics&Information Technology,2010,32(12):2848-2853.(in Chinese)
[12]金光虎,高勋章,黎湘,陈永光.基于chirplet的弹道目标逆合成孔径雷达回波分解[J].电子与信息学报,2010,32(10):2353-2358.
JINGuanghu,GAOXunzhang,LIXiang,CHENYongguang.Inverse synthetic aperture radar echo decomposition of ballistic target based on chirplet[J].Journal of Electronics&Information Technology,2010,32(10):2353-2358.(in Chinese)
[13]BAI Xueru,XING Mengdao,ZHOU Feng,LU Guangyue.Imaging of micro-motion targets with rotating parts based on empirical mode decomposition[J].IEEE Transactions on Geoscience and Remote Sensing,2008,46(11):3514-3523.
[14]贺思三,周剑雄,赵会宁,付强.基于AM-LFM分解的微动信号提取[J].电子与信息学报,2010,32(3):554-558.
HESisan,ZHOUJianxiong,ZHAOHuining,FUQiang.Micro-Doppler signal extraction based on AM-LFM decomposition[J].Journal of Electronics&Information Technology,2010,32(3):554-558.(in Chinese)
[15]ZHANG Q,YEO T S,TAN H S,LUO.Imaging of a moving target with rotating partsbased on thehough transform[J].IEEE Transactions on Geoscience and Remote Sensing,2008,46(1):291-299.
[16]MALLAT S G,ZHANG Z.Matching pursuits with time-frequency dictionaries[J].IEEE Transaction on Signal Processing,1993,41(12):3397-3415.
[17]PATI Y C,REZAIIFAR R,KRISHNAPRASADP S.Orthogonal matching pursuit:recursive function approximation with applications to wavelet decomposition[C]//Proceedings of the 27th Asilomar Conference on Signals,Systems,and Computers.Pacif ic Grove,CA,Nov.1993,1:40-44.
[18]TROPPJ A,GILBERT A C.Signal recovery from random measurements via orthogonal matching pursuit[J].IEEE Transactions Information Theory,2007,53(12):4655-4666.
