利用显著性的点云模型客观质量评价
2014-02-21张习民万旺根方志军
张 娟, 张习民, 万旺根, 方志军
1.上海大学通信与信息工程学院,上海200444
2.上海大学智慧城市研究院,上海200444
由于激光扫描仪等测量设备的快速发展,通过测量三维模型得到的点云数据日益精确、庞大.目前,一般的激光测量设备可以从物体表面轻易获取数十万、甚至数百万个点云数据.早在20世纪80年代,文献[1]提出了基于点绘制复杂的三维几何模型——点云模型,但当时并没有引起人们的关注.
近年来,随着网格模型处理复杂度的剧增,点云模型的优势更加明显.以点云模型为研究对象的基于点的计算机图形学已经受到广泛关注,点云模型的数字几何处理技术也逐渐成为图形学中的一个研究热点[2-4],在逆向工程、工业制造、文物保护以及医学可视化等领域得到广泛的应用.
三维几何模型(如网格模型、点云模型)能更好地表达物体的形状,但数据量庞大.因此,在存储、传输三维几何模型时,通常需要对三维几何模型进行适当的处理,如有损压缩.目前,针对三维几何模型处理的评价方法主要有主观评价方法和客观评价方法.主观评价方法简单而直观,但要耗费大量的时间和人力,并且受观测者个人因素的影响较大,大大降低了主观评价的实用性和准确性.客观评价方法将摆脱依赖人的主观判断的局限,有效提高评价的效率,为三维几何模型的处理提供科学的、统一的评价标准,具有操作简单、成本低、易于解析和嵌入实现等优点,将成为今后三维几何数据质量评价的研究重点.
1 相关工作
关于三维几何模型质量客观评价的研究主要集中在网格模型领域[5-10].文献[5]认为因嵌入水印而产生的视觉差异可以通过网格模型表面的粗糙度来反映,并定义了基于全局粗糙度的两种客观度量指标,用来计算含水印的网格模型质量.文献[6]基于网格模型的几何和纹理分辨率提出了一种三维网格模型质量的评估方法,并指出图像纹理在视觉上的贡献远远大于几何形状.文献[7]从视觉心理学的角度提出了一种评估不同网格模型简化算法的实验方法.文献[8]借鉴二维图像的质量评价方法,采用基于结构相似性的原理对网格模型进行质量评价.文献[9]以含水印网格模型与原网格模型之间的粗糙度增量作为评价水印不可见性的标准.
由于点云模型的研究尚处于起步阶段,关于点云模型的质量评价研究并不多见[11-12].文献[11]从噪声、密度、完整性、准确性等方面对采集的点云数据进行质量评价,分析了由于数字化系统来源导致点云数据获取的误差,并对每个评价指标提出了对应的评价方法.文献[12]分析了在3D成像系统中采集绘画制品的质量和性能要求.
在网格模型中,若删除一个面或点,则该处的平面将更光滑,但用于表达的信息发生了变化.而在点云模型中,若删除一个点,则该处为空,导致人眼无法获取任何有价值的信息.因此,两者之间的质量评价有着本质的区别.
本文首先对显著性计算方法[13]进行改进,提出了以点的法向量与其邻域点的平均法向量的差异作为计算该点显著性的权值;然后对比处理前后点云模型显著性之间的变化,并以此作为质量评价依据;最后通过实验验证了质量评价模型.
本文研究的是全参考类型的点云模型质量评价,点云模型中的对象是通过高分辨率激光扫描仪扫描实物得到的点云数据.
2 点云显著性
文献[13]根据计算二维图像的显著性的中心操作方法[14]计算了三维网格模型的显著性,认为三维模型的几何拓扑结构信息能够很好地反映网格模型的显著性.该方法以网格上顶点邻域内所有点的平均曲率作高斯权值的加权平均,表示该顶点的显著性,并把网格模型中零显著性的区域定义为一个球面,即3D模型中零显著性的区域为球形的点云面.
根据显著性在三维几何模型中的研究成果,得出显著性与人类视觉之间存在重要的关联特性.显著性越大的点对人的视觉越敏感,该点在点云模型中越重要,于是本文以点云模型的显著性作为质量评价的依据,下面给出本文显著性的计算过程.
设点云模型P是m个点的集合,点p∈P,np为p点的法向量(法向量的计算使用最小二乘法近似得到).求出以点p为圆心,r为半径的球体围内所有的点t,记为球邻域B(p,r)={t|‖t-p‖≤r};计算B(p,r)中所有点t的法向量nt与点p的法向量np之间的正弦值

如图1所示,对于点云模型,如果表面复杂或不光滑,对应相邻点之间的法向量夹角就越大;如果表面比较光滑,人眼视觉对该区域不太敏感,则该区域相邻点之间的法向量夹角越接近0或π.两法向量之间的夹角取值范围为[0,π].对于显著性越高的点,与近邻点计算得到的正弦值越接近1;对于显著性越低的点,其正弦值越接近0.法向量估算的方法具有二义性,即计算得到的只是法向量所在的直线,而没有确定是直线的哪个方向.根据正弦函数对称于π/2的特性,可以避免对法向量重定向的计算.
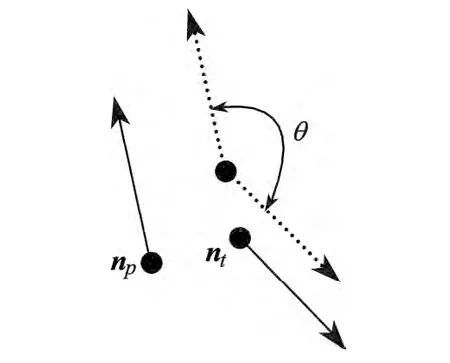
图1 点法向量夹角示意图Figure 1 Angle between the normal vectors
下面给出点云模型P中点p在球邻域B(p,r)中的高斯平均加权显著性的计算公式
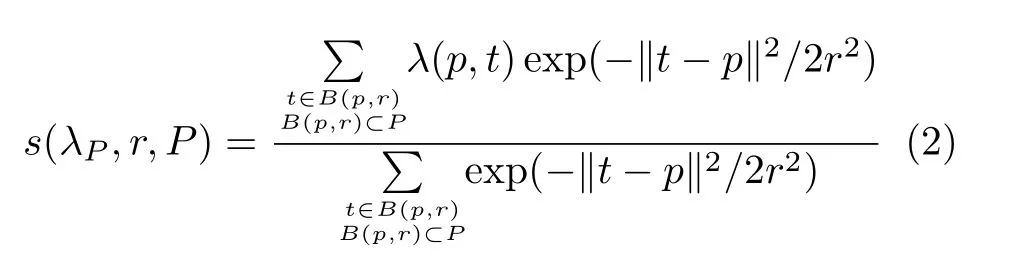
为了计算方便,当p点不存在时,令s(λP,r,P)=0.可以看出每个点的显著性是通过与球邻域内所有点的法向量夹角的正弦值进行高斯加权平均得到的.r的取值不同,包含在球邻域中的点也不同,计算得到的显著性也不相同.显然,点云模型中零显著性区域为平面,即光滑平面上的点被删除对于人的视觉影响较小,而凹凸面上的点被删除对于人的视觉影响则较大.
3 质量评价模型
原始点云模型通常包含较多的点,而处理后的点云模型包含较少的点,这两个点云模型属于同源模型,且不包含噪声点.下面给出点云模型的客观质量评价模型的计算过程.
3.1 点的分类
根据点在处理前后点云模型中的对比结果可以把点分为3类:不变点˙V、变异点¨V、消失点V.不变点是在点云模型处理前后不发生变化的点.变异点是在原始点云模型中不出现而在处理后点云模型中出现的点.消失点是在原始点云模型中出现而在处理后点云模型中不出现的点.假设P为原始点云模型,Q为处理后的点云模型,则点分类示意图如图2所示.
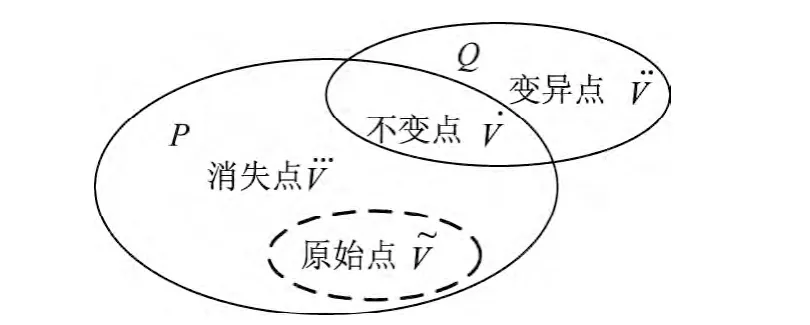
图2 点法向量夹角示意图Figure 2 Point classif ication diagram
下面给出不变点、变异点、消失点的定义:
在同源点云模型P和Q中,变异点只在Q中出现,而不在P中出现.将变异点v在点云模型P的消失点集中的最邻近点作为变异点的原始点,记为˜v.变异点通常在较近距离进行变异,于是可设定一个阈值r为变异点的搜索范围,如果在此范围内无最邻近点,则认为该变异点为噪声点,不存在原始点.原始点的定义如下:
定义4 在同源点云模型P和Q中,将变异点变异之前的原始点集合记为
根据以上各类点的定义,可以很容易对两个点云模型中的点进行筛选和分类.下面给出各类点集的显著性计算公式:
不变点集在点云模型P中的显著性记为

不变点集在点云模型Q中的显著性记为

变异点集的显著性记为
消失点集的显著性记为

3.2 质量评价
在同源点云模型P和Q中,若要点云模型的质量前后保持不变,则点的显著性应保持不变,但因消失点与变异点的存在,点的显著性将发生改变,于是可以考虑利用这种变化来衡量点云模型的质量差异,从而将两个点云模型的差异度归结为以上3类点的关于显著性的算法模型.
不变点集的显著性变化情况可归纳如下:在点云模型P和Q中,分别计算不变点的显著性,一般由于点的减少,凹凸面的细节情况不明显,即不变点的显著性会降低,其计算公式为

变异点的显著性变化情况归纳如下:点云模型Q中的变异点是由点云模型P中的原始点演变而成,因此变异点显著性将在原始点的显著性上发生变化,即变异点显著性变化的计算公式为

由定义4可知,一个原始点一定是一个消失点,原始点集为消失点集的子集.
消失点集的显著性变化情况如下:消失点只在点云模型P中出现,因此消失点的显著性在处理后点云模型Q中为零.由于消失点集中包含了原始点集,需要减去原始点集.消失点的显著性变化计算公式为
根据对显著性变化的分析,给出有参考的点云模型质量的计算公式
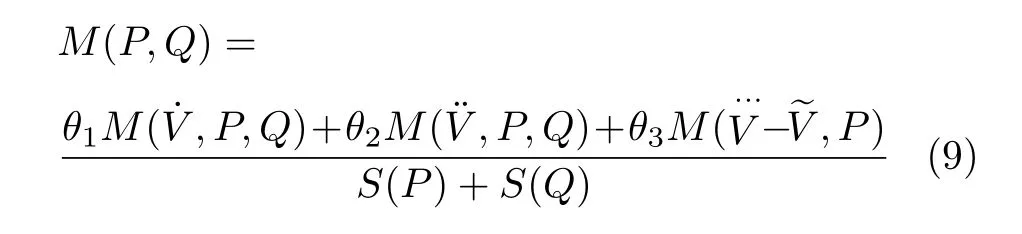
式中,θ1、θ2、θ3为权值,满足θ1+θ2+θ3=3,表示各类点影响点云模型质量的重要程度.
当同源点云模型P和Q相同时,M(P,Q)=0,说明点云模型在质量上不存在差异.当点云模型Q为空时,M(P,Q)=100%,说明此时点云模型的质量全部损失了.
如果点云模型P和Q不是同源点云模型,说明两个点云模型不存在任何的相交部分,此时得到的结果将为100%.
3.3 信噪比
为了方便实验结果的对比,本文针对点云模型的特点,参照二维图像信噪比的定义,设计了一种点云模型的信噪比计算方法.
点云模型x坐标的均方差计算公式为

式中,f和f′代表点云模型P和Q各坐标分量的值,n为点云模型的点数.当没有点对应时,x坐标值取当前点云模型的最大变化值Δfx,x方向上峰值信噪比的计算公式为

取各坐标分量的峰值信噪比平均值作为最后的峰值信噪比评价的结果,其计算公式为

3.4 实验结果及分析
用FARO Focus3D高分辨率三维激光扫描仪对猴子玩具进行原始点云模型的采集.为了避免点云模型在配准过程中对扫描数据产生干扰,尽可能地反映自然物体的真实性,本文仅使用扫描数据中的一站点云数据.经过噪声预处理后,获取到的原始点云模型共包含520 125个点.
利用PCL库[15]的开源软件生成同源的5个不同分辨率的点云模型,分别如图3~8所示.图3为原始点云模型;在原始点云的基础上采取均匀压缩方法,压缩比为1.1855的点云模型,压缩后包含438 734个点,如图4所示;压缩比为1.7712的点云模型,压缩后包含293 662个点,如5所示;压缩比为3.508 0的点云模型,压缩后包含148 270个点,如图6所示;压缩比为10.360 8的点云模型,压缩后包含50 201个点,如图7所示;压缩比为25.600 5的点云模型,压缩后包含20 317个点,如8所示.

图3 原始点云模型Figur e 3 Original model

图4 压缩比为1.185 5的点云模型Figure 4 Model with compression ratio of 1.185 5

图5 压缩比为1.771 2的点云模型Figure 5 Model with compression ratio of 1.771 2

图6 压缩比为3.508 0的点云模型Figure 6 Model with compression ratio of 3.5080

图7 压缩比为10.3608的点云模型Figur e 7 Model with compression ratio of 10.3608
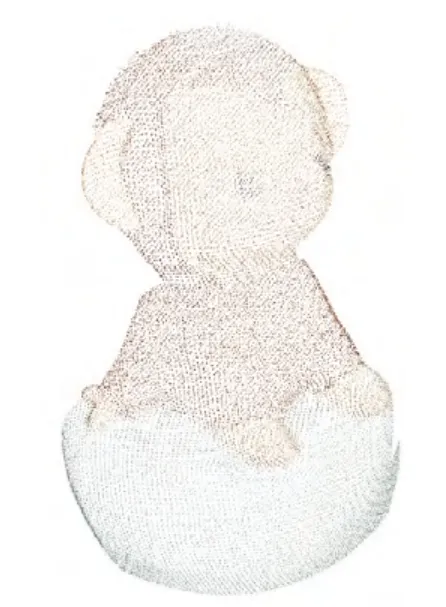
图8 压缩比为25.6005的点云模型Figur e 8 Model with compression ratio of 25.600 5
由于目前还没有公认的点云数据质量客观评价标准,在实验中还需引入主观评价方法与本文的评价方法进行对比.参与主观评价的人数共计18人,计分标准为百分制,最低分0%定义为点云数据无损耗,质量最高;最高分100%定义为点云数据完全耗损,质量最低.把原始点云模型作为参考模型,对参与评价的图3~8的5个点云模型进行打分,得到主观评价的结果.
经过计算实验得到了主观和客观评价分析的对比结果,如表1所示.根据r的不同取值,表中列出了不同压缩率下点云模型质量耗损的实验结果.其中r的取值分别为0.3、0.2、0.1、0.05,θ1、θ2、θ3取值分别为1、1、1.
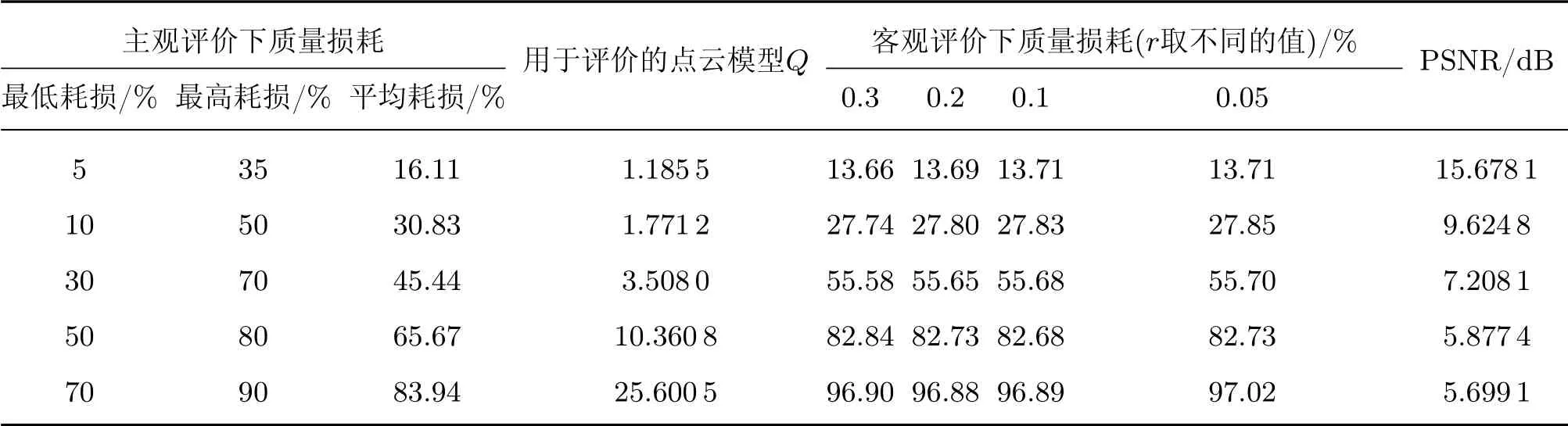
表1 主观评价与客观评价的实验结果对比Table 1 Comparison experiment results between subjective and objective evaluation
从实验结果可以得出以下结论:1)本文的客观评价的结果基本上与主观评价一致;2)压缩率和点云模型的降质基本上呈正比关系;3)压缩率在30%~55%附近的压缩-失真率最好;4)在某个合理范围内,r的取值对实验结果影响较小;5)对比本文的客观评价和信噪比的结果可知,本文的结果更能体现人的感知.
4 结语
本文根据人类视觉系统对于物体的凹凸部分可以产生更多的视觉感知这一特点,改进了点的显著性定义,并将显著性应用于点云模型质量的客观评价.由实验结果可知,基于显著性的点云模型质量的客观评价可以很好地替代人的主观评价.
点云模型中不仅包含坐标信息,而且包含了丰富的颜色信息.为了进一步提高质量评价,今后的研究将引入点云模型的颜色属性作为评价指标.
[1]LEVOY M,WHITTED T.The use of points as a display primitive[M].[S.l]:University of North Carolina,1985.
[2]AMENTA N,KIL Y J.Def ining point-set surfaces[J].ACM Transactions on Graphics,2004,23(3):264-270.
[3]ISENBURGM.LASzip:losslesscompression of LiDAR data[J].Photogrammetric Engineering and Remote Sensing,2013,79(2):209-217.
[4]DURANLEAUF,BEAUDOINP,POULINP.Multiresolution point-set surfaces[C]//Proceedings of Graphics Interface 2008.Canadian Information Processing Society,2008:211-218.
[5]CORSINI M,GELASCA E D,EBRHIMI T,BARNI M.Watermarked 3D mesh quality assessment[J].IEEE Transactions on Multimedia,2007,9(2):247-256.
[6]PANY,CHENGI,BASUA.Quality metric for approximating subjective evaluation of 3D objects[J].IEEE Transactions on Multimedia,2005,7(2):269-279.
[7]CHENG I,SHEN R,BOULANGER P,YANG X D.Perceptual analysis of level-of-detail:the JND approach.2006[C]//ISM'06.Eighth IEEE International Symposium on Multimedia,2006:533-540.
[8]石振锋,金凯,牛夏牧.基于结构相似的三维模型视觉降质度量[J].哈尔滨工业大学学报,2010(9):1444-1448.
SHIZhenfeng,JINKai,NIUXiamu.Evaluation of visual perception degradation for 3D mesh based on structural similarity[J].Journal of Harbin Institute of Technology,2010(9):1444-1448.(in Chinese)
[9]杨斌,李晓强,李伟,丁广太.基于表面粗糙度的三维模型质量评价研究[J].计算机科学,2011,38(1):276-278.
YANG Bin,LI Xiaoqiang,LI Wei,DING Guangtai.Quality assessment for 3D model based on surface roughness[J].Computer Science,2011,38(1):276-278.(in Chinese)
[10]LAVOUÉG.A local roughness measure for 3D meshes and its application to visual masking[J].ACM Transactions on Applied Perception(TAP),2009,5(4):aticle 21:1-23..
[11]LARTIGUEC,CONTRIA,BOURDET P.Digitised point quality in relation with point exploitation[J].Measurement,2002,32(3):193-203.
[12]BLAIS F,TAYLOR J,COURNOYER L,PICARD M,BORGEAT L,DICAIREL G,RIOUXM,BERALDINJ A,GODING,LAHNANIERC.Ultra-high resolution imaging at 50µm using a portable XYZ-RGB color laser scanner[C]//Intl.Workshop on Recording,Modeling and Visualization of Cultural Heritage.Centro Stefano Franscini,Monte Verita.Ascona,Switzerland,2005,May:22-27.
[13]LEEC H,VARSHNEYA,JACOBSD W.Mesh saliency[C]//ACM Transactions on Graphics,2005,24:659-666.
[14]ITTI L,KOCH C,NIEBUR E.A model of saliencybased visual attention for rapid scene analysis[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,1998,20(11):1254-1259.
[15]RUSU R B,COUSINS S.3D is here:point cloud library[C]//2011 IEEE International Conference on Robotics and Automation(ICRA),2011:1-4.