基于LiDAR的3D产品制作方法及其精度评定
2014-02-19何忠焕
何 静,何忠焕
(1.国家测绘地理信息局 重庆测绘院,重庆 400015)
LiDAR技术已成为大比例尺测绘产品生产环节中一项重要技术手段。它是采用主动遥感方式,集成GPS、惯性导航、激光测距等先进技术,通过发射激光脉冲,再由LiDAR系统上的接收单元收集地物的海量反射信号,从而实现三维地面信息的测绘与定位[1]。与传统遥感技术相比,具有对控制测量依赖少、受天气影响小、自动化程度高、成图周期短等特点。
1 基于TerraSoLid的LiDAR数据处理
本次对LiDAR数据的处理在TerraSoLid软件中进行,基于MicroStation平台开发,该平台提供了视图操作、矢量编辑等功能[2]。TerraSoLid主要包 含 了Terrascan、Terramodel、Terraphoto等 模 块。LiDAR点云的预处理、坐标转换、点云分类主要使用的是Terrascan及Terramodel,正射影像制作主要利用Terrascan及Terraphoto进行。
1.1 DEM制作
1.1.1 点云预处理
点云数据预处理主要包含获取的不同航带点云数据的航带间纠正、坐标系统转换以及高程纠正。主要方式是通过人机交互检查或者程序自动检查并纠正的方式进行。
1)航带纠正:由于受到飞机姿态、飞行高度等因素影响,不同航带间的点云数据存在高程差异,如果高程较差超出成图比例尺的数据生产允许范围,则应进行航带间点云数据纠正。
2)坐标系统转换:点云获取采用的坐标与GPS一致,为WGS84地心坐标。根据项目要求,应该将点云坐标向目标数学基础进行转换。此处的坐标转换包括2个方面,一方面是基于框架的二维坐标转换,另一方面是基于不同水准面的高程值拟合。在Terrascan的坐标变换模块,用于坐标转换的控制点位应均匀分布于测区的四周及测区的中部,坐标转换控制点数量不少于4个。首先定义项目的目标投影,主要设置内容包括椭球的长半轴、扁率、七参数(即目标椭球相对于WGS的线元素偏移量、角元素偏移量以及缩放因子)、中央经线、东偏及长度缩放比例等。通过预设参数实现不同基准的数据转换。基于不同水准面的高程值拟合一般有2种方法:一种是使用覆盖测区若干高程控制点对应的同名点云建立转换关系,从而实现不同高程基准的高程数据拟合;另一种是通过已知似大地水准面对应测区的高程异常,直接拟合获取。本项目采用第一种方式实现不同水准面的高程值变换。
1.1.2 点云分类
完成预处理后的LiDAR数据通过检查合格后开展点云分类,点云分类包括初分类和精分类2步[3]。初分类基于宏执行自动分类。采用面向对象分类的方法建立分类规则[4]。本项目提出点云高程值“自上而下”的分类方式,根据点云数据的高度、分布的形状、密度、坡度等特征编写宏规则,进行自动分类。
初始分类完成后进行手工精分类,准确分离地面点和非地面点。主要通过人机交互的方式,通过剖面显示来进行分类。精分类前后地面模型对比如图1所示。

图1 点云精分类前后模型渲染示意图
1.1.3 DEM制作
将精分类以后的地面点在Terramodel中构三角网生成数字高程模型,为了达到测区DEM无缝,用来生产数字高程模型的点云数据必须经过严格接边处理。
1.2 DOM制作
在TerraSoLid的Terraphoto中正射影像制作包括以下几步:
1)影像内定向。通过导入相机检校文件包括相机主距、镜头畸变等参数,确定每张影像像主点的位置。
2)导入影像列表。该列表包含测区每张影像的摄影时刻和获取的外方位元素。
3)相对定向。手工添加连接点在像对重叠处选取同名点,确定整个测区模型的各影像间的相对位置关系。
4)区域网平差。利用精分类抽稀后的地面点作为平高点[5],将整个模型纳入到地理坐标中,解算连接点的绝对坐标,利用解算的绝对坐标更新影像列表中的外方位元素[6,7]。再将新的外方位元素应用到工程中,通过平差计算调整连接点点位直至平差结果满足同等比例尺生产精度要求。
5)正射纠正。消除了像片倾斜误差和地形起伏的影像后,将中心投影改为正射投影,对影像进行正射纠正。
6)匀色、镶嵌及裁切。对测区的像片按照模板进行匀光匀色,使得整个测区内影像色调、亮度等信息保持一致,并对完成匀色后的影像在Terraphoto中进行镶嵌线编辑,避免自动镶嵌后存在地物矛盾的现象。镶嵌线编辑前后成果如图2所示。

图2 房屋镶嵌线编辑前对比后示意图
1.3 DLG采集
基于点云数据的DLG采集目前主要基于Microstation平台或者CASS平台,本项目基于CASS平台完成DLG采集。主要生产步骤包括:
1)基于DEM成果的等高线生成及处理,利用DEM成果生成成图比例尺要求的等高线,并将等高线进行节点抽稀和圆滑,既保证等高线精度要求也使等高线的表示看上去比较美观。
2)将精分类后的地面点云按照规则格网进行抽稀,抽稀后的点云作为高程注记点。
3)对照DOM及点云数据进行地形要素采集,采集过程中DOM主要用于判断要素的形状和性质,而点云数据用于判断点云的实际位置。在实际生产中可引进地面浮雕模型,辅助判断沟渠、坎、坡等不能直观从DOM或者海量点云数据中发现的要素。地面浮雕模型如图3所示。
4)DLG制作完成,通过外业补测、调绘后即可进行成果整理入库。
2 精度评定
以“某市1︰2 000信息化测图”项目为例,采用外业散点法沿道路施测的平面检查点和各高程检查点检核基于LiDAR数据生产DEM、DOM以及DLG的精度。
1)高程精度检核:将外业实测点展于DEM上,对比实测点与DEM上同名点位高程值差值。外业实测949个实测高程检查点,实测点类型、数量及检核精度如表1所示。
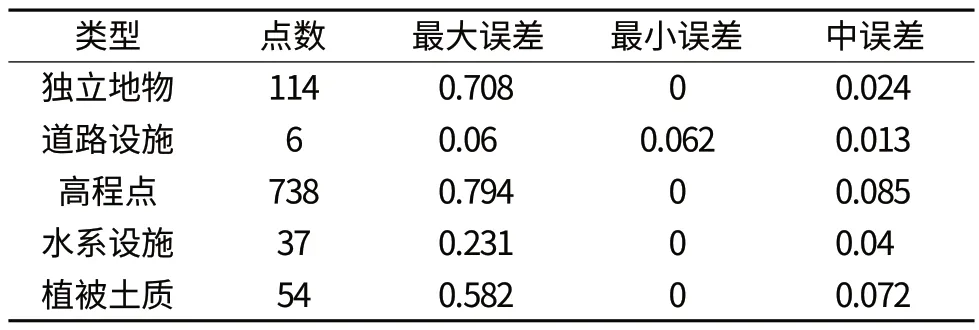
表1 高程精度检核表
本次检核点共分为5个类别,其中野外实测高程点所占比例最高,为82.5%,且误差分布服从正态分布。
1︰2 000测图高程精度是平地小于0.4 m、丘陵地小于0.5 m、山地小于1.2 m及高山地小于1.5 m。本次所检核的5类点高程中误差无论地形如何,DEM精度都高于0.4 m,因此基于LiDAR数据生产的DEM产品精度较高,能够满足大比例尺测图的精度要求。
2)将外业实测点与采集的DLG叠加,对比同名点点位的平面误差。外业实测1 170个高程检查点,实测点类型、数量及检核精度如表2所示。
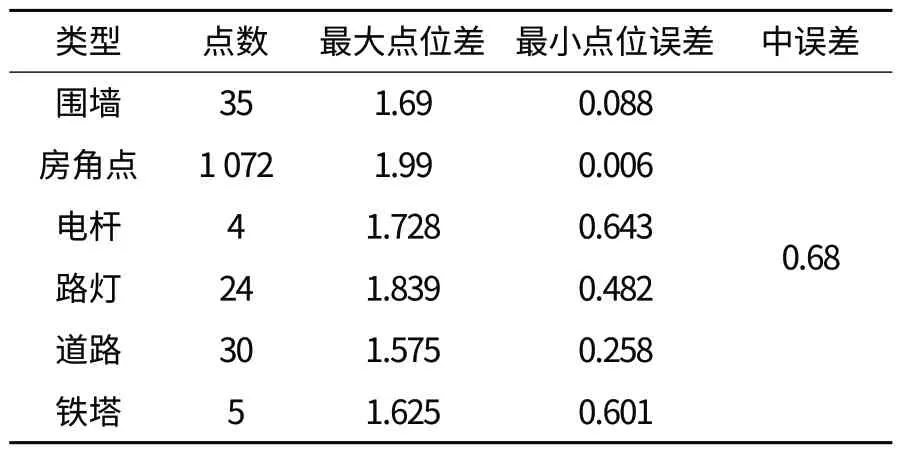
表2 平面精度检核表
1︰2 000测图平面精度要求平地、丘陵地位置中误差应小于等于1 m,接边限差小于等于2个像素。经检核,基于LiDAR数据的DOM、DLG产品成果的高程误差及平面误差分布符合正态分布规律,且个别较大误差值也在限差范围内。因此,基于LiDAR数据生产的3D产品完全能够满足1︰2 000比例尺成图的精度要求。
3 结 语
通过介绍基于LiDAR数据的DEM、DOM、DLG产品制作的技术流程和方法,提出生产中数据处理的关键技术或应注意的环节以供参考:
1)数据预处理时,及时对处理成果进行过程控制检查,避免后期出现返工情况。
2)为了测区DEM实现完全无缝镶嵌,除了针对分幅的精分类点云数据进行接边外,还应对分幅范围进行外扩后再导出地面模型。
3)DOM生产中,选取的连接点点位分布及数量对平差精度有较大影响,选取原则尽量满足分布影像四角和中心。
4)DLG采集时,与地面存在高差的地物、地貌均应参考点云数据判断其实际位置,如沟、斜坡、坎、高架桥梁等地物。
5)房屋采集是DLG采集的重点,应注意:①在建筑密集区,矮建筑受遮挡,DOM上可能完全看不到低矮建筑的轮廓或者只能看见部分轮廓,此时不能简单地依据DOM进行绘制,应依据点云的形状判断实际房屋轮廓。②从DOM上如果能直接看见建筑墙基,可以墙基进行房屋纠正,但是应结合点云判断基准边。
6)等高线制作的数据源尽量使用DEM而不用精分类后的地面点点云,既可以保证地形的整体走势,也减少了后期的编辑工作量。
[1]刘沛,李英成,薛艳丽,等.基于TerraSoLid与Inpho的LiDAR数据处理方法分析与研究[J].遥感应用,2010(1):17-21
[2]李英成,文沃根,王伟.快速获取地面点位数据的LiDAR技术系统[J].测绘科学,2002,27(4):35-38
[3]楚长春,麻风海.点位激光扫描仪点云数据在MicroStation下的处理研究[J].测绘与空间地理信息,2007(10):114-116
[4]刘建国,张敬,高伟,等.LiDAR点云数据中建筑物的快速获取[J].地球科学:中国地质大学学报,2006,31(5):615-618
[5]王佩军,徐亚明.摄影测量学[M].武汉:武汉大学出版社,2008
[6]邓非.LiDAR数据与数字影像的配准和地物提取研究[D].武汉:武汉大学,2006
[7]毕凯,李英成,薛艳丽,等.ERDAS LPS与TerraSoLid软件相结合快速制作低空数码遥感正射影像图的方法[J].遥感信息,2008(5):55-58
