基于Cortex-M3和多传感器数据融合的咪表系统设计
2014-02-18马卫国
张 波,马卫国
(天津师范大学计算机与信息工程学院,天津300387)
随着经济社会的持续发展以及城市化水平的不断提高,城市机动车数量迅速增加,“停车难、收费乱”成为城市交通管理中的新问题[1].为解决这一难题,许多城市交通管理部门在规划新的停车场时,纷纷增设路边停车位,同时采用咪表作为计时收费手段[2-3].但目前各大城市中,由于咪表停车系统缺乏停车位状态和咪表收费数据之间的联动,只能采取“人工管理为主,咪表管理为辅”的手段,因此造成大量咪表资源的浪费和诸多的管理漏洞[2,4].
针对以上问题,为解决停车位状态的实时准确监测问题,本研究提出一种基于ARM Cortex-M3处理器的智能咪表管理系统,运用多传感器信息融合技术实现对车位状态的准确识别,以期为目前咪表停车管理中所存在的漏洞提供技术解决方案.
1 整体结构及功能
智能咪表管理系统包括咪表、停车点主机和城市管理服务器3个层次.其中最低层的咪表负责单一车位的使用管理,其功能包括车位状态监测、人机交互、刷卡收费以及数据上传;停车点主机负责汇总本点位的停车位状况,并提示管理员完成紧急情况处理;处于最高层的服务器汇总各点位的数据,并对外发布车位使用情况,方便驾驶员就近寻找停车位.在通信方式的选择上,咪表与停车点主机间采用短距离无线通信技术,停车点主机与服务器之间采用以太网.智能咪表管理系统的整体结构如图1所示.
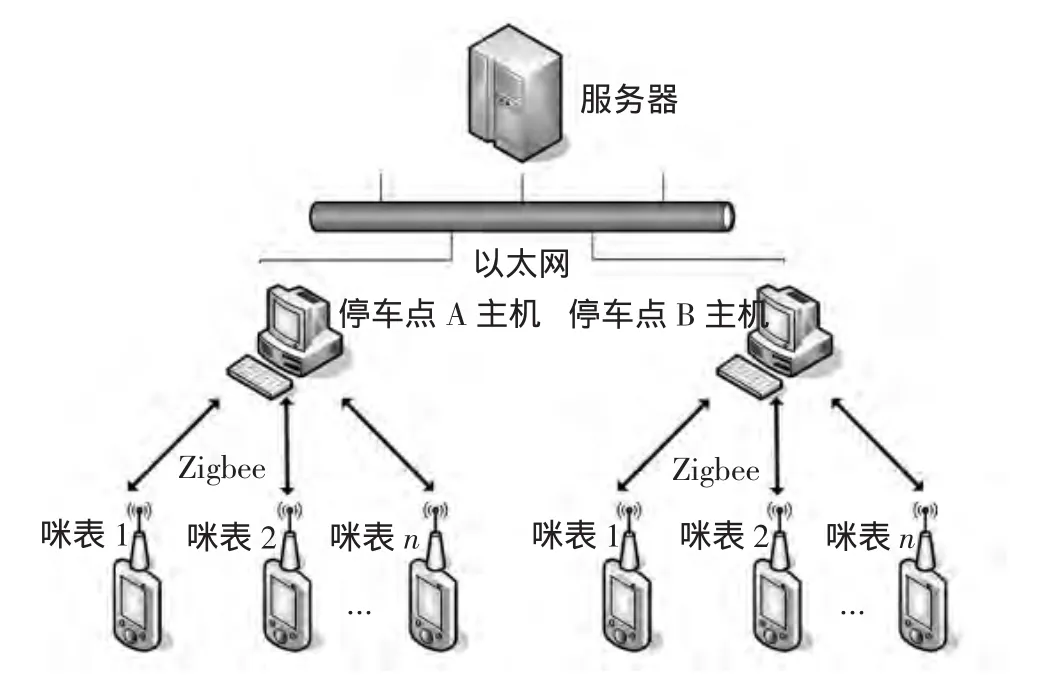
图1 咪表停车管理系统结构图Fig.1 Block diagram of the intelligent parking meter system
由于低层咪表可对车位使用状况进行准确监测和实时数据上传,因而从根本上杜绝了“乱收费”现象.同时,停车点主机和服务器对数据的实时汇总和及时发布可以最大限度地提高车位的使用率,在一定程度上缓解了“停车难”的问题.作为系统组成的核心,下位机咪表的软硬件设计是研究的主要内容.
2 咪表的主要硬件设计
2.1 总体硬件设计
咪表硬件设计包括STM32最小系统、电源管理电路、磁阻传感器电路、超声波传感器电路、红外传感器电路、液晶显示电路、按键扫描电路、语音电路、射频读卡器电路和无线通信电路[6-7].
系统CPU选用意法半导体(简称ST)的32位微控制器STM32,该系列基于专为要求高性能、低成本、低功耗的嵌入式应用设计的ARM Cortex-M3内核[8].智能咪表的硬件设计[5]如图2所示.
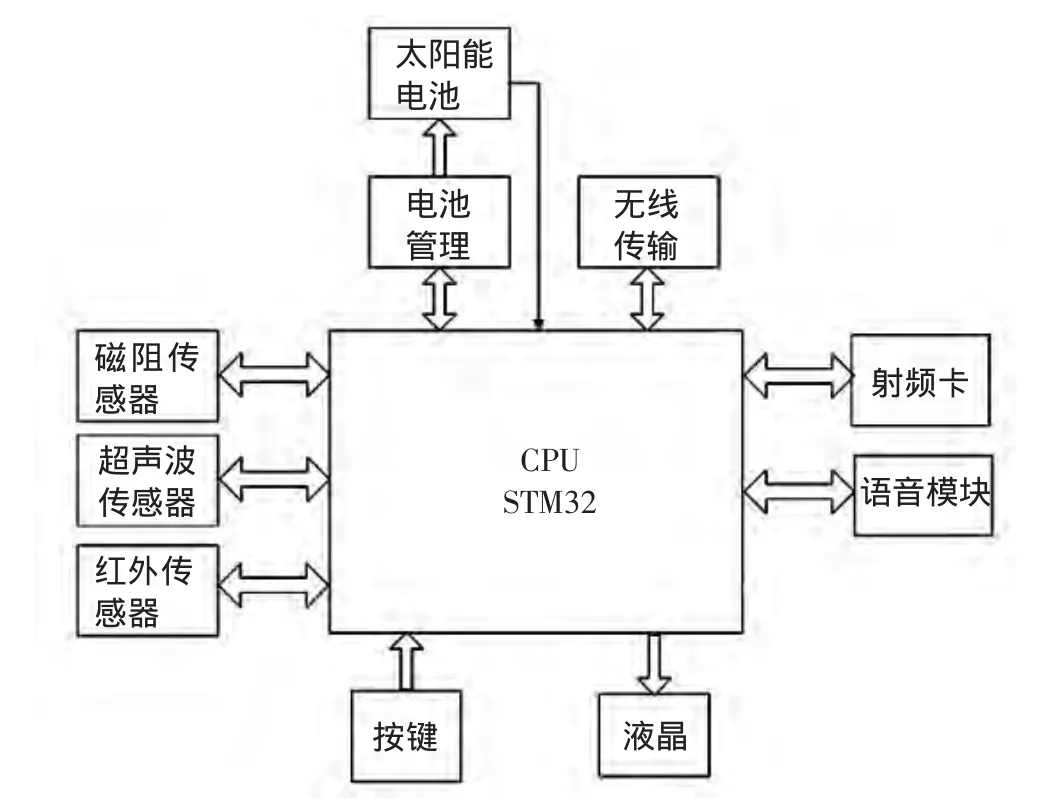
图2 系统的硬件组成框图Fig.2 Hardware block diagram of the system
2.2 传感器电路的设计
2.2.1 磁阻传感器
1个铁磁性物体(汽车),无论它是运动的还是静止的,均对地球磁场产生扰动.磁场传感器可检测由车辆干扰引起的地磁场变化[9].
本系统选用美国霍尼韦尔公司的3轴各向异性磁阻传感器HMC5883L作为检测传感器.采用磁场偏移量大小的变化对车辆存在进行检测.传感器内部对3个方向的磁场强度值进行数字化测量输出,CPU根据式(1)对向量幅值A进行计算.

式(1)中:X代表水平磁场强度的X分量(北向);Y代表水平磁场强度的Y分量(东向);Z代表垂直磁场强度.当车辆停在磁传感器安放位置的附近时,该传感器的A值大小将从初始值(无车辆)开始发生变化[10-11].图3为传感器与CPU的接口电路图.
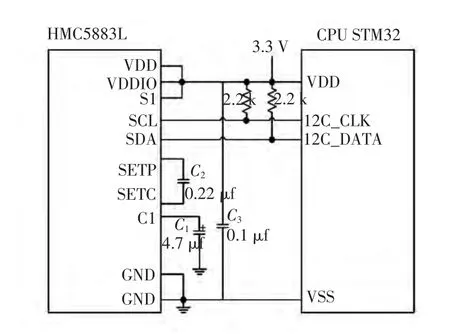
图3 磁传感器接口电路Fig.3 Interface circuit diagram of magnetic sensor
2.2.2 红外传感器
汽车(特别是发动机)是一个典型的红外线发射源,利用热释电红外传感器检验车辆在驶入或驶离车位之前,其在释热电红外传感器的菲涅尔透镜前的运动会使红外传感器产生脉冲信号,从而检测到车辆的存在.
2.2.3 超声波传感器
本设计中,2个超声波传感器安装在咪表的中间位置,并呈一定夹角,其高度等于小型车平均高度的一半;2个超声波传感器可以测量出咪表正前方物体与咪表的距离以及物体的长度,据此判断是否有车辆进入指定的停车区域.
2.2.4 传感器参数数据融合
磁阻传感器、红外传感器和超声波传感器在封闭无干扰的环境下,均可以正确检测出车位上是否存在车辆停放,但因为本研究所设计的咪表主要应用于闹市区的路边停车场,各种干扰极大,所以单一的传感器很难实现对车辆的准确检测.因此采用对多种传感器参数的数据融合是解决此问题的有效途径[13].本系统选择D-S证据理论作为融合中心算法[14].
检测过程中,红外传感器对车位周围的移动目标进行识别,并判断出目标物体是远离车位还是靠近车位,通过对红外传感器的采样,计算出辨识框架中的基本概率分配函数以供决策层融合使用;磁阻传感器可以识别靠近车位的目标物体,通过不同时刻的采样判断出目标对车位周边磁场的影响程度,进而把数据传送给预处理单元,计算出基本概率分配函数以供融合使用;2个超声波传感器对车位上的目标进行检测,得出目标的宽度以及与咪表的垂直距离,再送预处理单元,计算出基本概率分配函数以供融合使用.融合中心对4个传感器的证据体用D-S证据理论进行融合,最后根据判定规则判定车位的状态.
2.3 射频读卡器电路
射频收发模块执行系统的收费功能,由天线、射频读写芯片及其相应的外围电路组成.本系统采用复旦微电子生产的基于ISO14443的非接触卡读卡机芯片FM1702.该模块具有体积小、易于嵌入到应用系统中使用的特点.微处理器与FM1702SL芯片的接口原理图如图4所示.
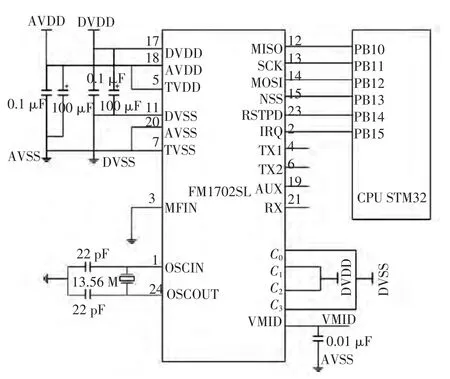
图4 FM1702SL与STM32接口电路图Fig.4 Interface circuit diagram between FM1702SL and STM32
2.4 无线通信电路
无线通信电路选用上海桑锐电子的无线传输模块SRWF-1022,该模块提供透明数据接口,适应任何标准或非标准的用户协议,自动过滤掉空中产生的假数据,用户无需编制多余的程序,实现所收即所发,模块的工作频率为433 MHz,可靠传输距离为100m.SRWF-1022的接口电路如图5所示.
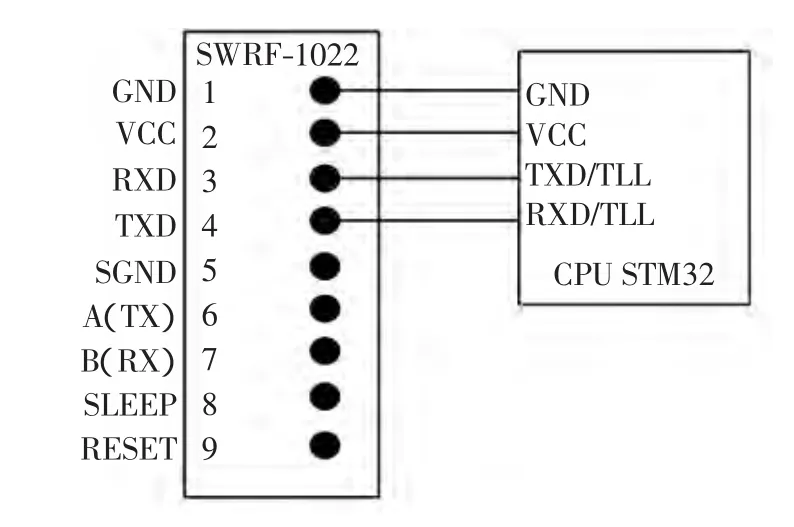
图5 SRWF-1022TTL与STM32接口方式电路图Fig.5 Interface circuit diagram between SRWF-1022TTL and STM32
3 咪表的软件设计
智能咪表系统的软件设计流程如图6所示.
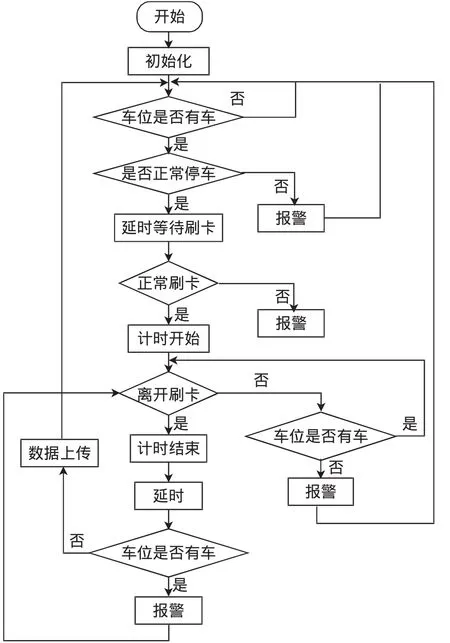
图6 系统软件流程图Fig.6 Software flow chart
系统初始化后,即进入空闲等待状态,此时传感器处于循环检测状态,若检测到车位有正常停车后需延时一段时间,等待驾驶员进行刷卡.驾驶员正常刷卡后即进入计时收费状态;若有逃避刷卡,语音模块将发出报警.计时收费状态下,传感器同样处于循环检测状态,以保证车辆安全.驾驶员离开时,需再次刷卡,系统将停止计时,并将本次停车费用显示在液晶屏上;若系统发现未经刷卡而车辆离开停车位的状况,将发出报警并锁死该IC卡.车辆离开后,系统将本次停车的相关数据上传至停车点主机,然后进入空闲等待状态,以备进入下一循环的操作[6].
4 系统调试
为了验证多传感器融合算法在车位状态检测中的作用,系统分别在没有使用算法和使用单传感器的情况下进行对比测量试验.测试场地选用天津师范大学校内主干道;测试用车型为菱悦V3(长4405mm×宽1700mm×高1415mm),实验结果如表1所示.通过对比实验,采用多传感器数据融合技术的车位状态识别正确率明显提高.
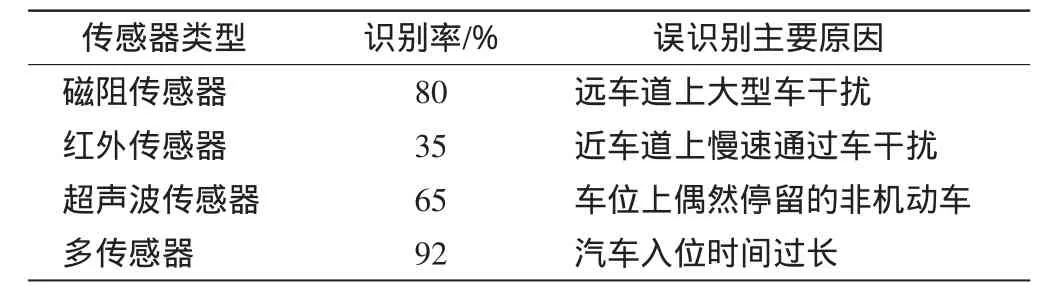
表1 实验结果Tab.1 Results of experiment
通过实验也发现系统有待解决的问题:
(1)车型过少,若采用不同车型,识别率会有所降低;
(2)驾驶员停车入位过程中的反复启停会造成错误识别,后续算法设计中应引起充分注意;
(3)实验场所相对城市闹市区各种干扰相对较少.
5 结论
本研究提出一种基于多传感器的智能咪表系统,充分利用多种传感器在性能上的差异性和互补性,通过有效融合采集到的传感器信息,实现了停车位状态的精确检测,解决了现有咪表停车系统中停车状态和咪表数据之间缺乏联动的问题.系统采用无线模块进行数据传输,使所有停车数据有据可查,从而从源头上弥补了目前路边停车位管理中的诸多漏洞,具有较强的推广应用价值.
[1]范轶芳,杨励雅.停车场资源优化配置—基于城市空间视角[J].首都经济贸易大学学报,2013(3):100-105.
[2]冷静.城市停车难的中国瓶颈与多元策略优化[J].上海城市管理,2013(2):33-37.
[3] 杭东.国外大城市如何解决停车难[J].交通与运输,2011(27):63-64.
[4]吕北岳,张晓春.深圳市路内停车泊位设置研究[J].城市交通,2009,7(2):19-21.
[5]胡昭昀,刘磊.基于MSP430的超低功耗北京停车咪表系统[J].军民两用技术与产品,2009(7):39-41.
[6] 安庆敏,李炜,董春,等.基于ZigBee的小区泊车位智能无线管理系统[J].低压电器,2011,18:46-49.
[7]李鹏宇,龙沪强.一种停车场无线车位检测器设计与实现[J].传感器与微系统,2012(1):143-145.
[8] 王明玉,董浩,王建.基于GPRS的车载故障诊断网关的设计与实现[J].汽车工程,2009(10):999-1003.
[9] 杨波,尼文斌,王春香,等.基于异向性磁阻传感器的车辆检测与车型分类[J].仪器仪表学报,2013(3):537-544.
[10]马姗姗,程明霄,蒋书波,等.基于地磁传感器的车辆检测系统的研究[J].机床与液压,2012(2):65-68.
[11]方庆清.磁电阻传感器的应用及其若干问题[J].磁性材料及器件,2012(2):10-12.
[12]麦新晨,杨明,王春香,等.一种基于多传感器融合的车辆检测与跟踪方法[J].上海交通大学学报,2011(7):1012-1016.
[13]康健,谷云彪,李一兵.基于DS证据理论的多传感器信息融合算法[J].中国惯性技术学报,2012(6):670-673.
[14]刘丽娟,刘国栋.基于多传感器视听融合的三维目标跟踪[J].传感器与微系统,2013,32(6):47-52.
