车道偏离预警算法研究
2014-02-16苏春莉
苏春莉,李 梅
车道偏离预警算法研究
苏春莉,李 梅
(西安欧亚学院信息工程学院,陕西西安,710065)
本文主要对车道偏离预警算法进行一定的研究。在介绍算法基本流程的基础上,主要阐述了图像预处理、车道识别、偏离预警三个实现步骤。实验表明,该方法能够正确分析车道中的位置信息,当车辆偏离车道时及时给予报警。
车道线识别;图像预处理;偏离决策
车道偏离造成的人员财产损失约占整个交通事故中损失的三分之一之多,这些事故主要由于驾驶员注意力分散造成的。车道偏离预警系统(lane departure warning system,LDWS)的开发应用能够提醒和辅助驾驶员及时修正无意识的车道线偏离,从而减少或避免交通事故的发生。
1 基本原理
车道偏离预警系统的基本原理是:系统通过摄像头获取道路信息,通过雷达等其它传感器获取车辆自身相关信息以及外界环境信息,同时获取人机交互界面中由驾驶员所设置的参数信息,以这些信息作为基础,进行车道偏离预警算法的决策,当发生偏离时,系统可通过声音提示、LCD显示器显示警告信息等方式来警示驾驶员,使得驾驶员能够及时调整车辆的行驶方向,避免交通事故的发生。其中车道线检测是车道偏离预警系统中一个关键性问题。
2 车道偏离预警算法基本流程
车道偏离预警算法的思想是:通过对车辆前方视觉传感器所拍摄的道路图像进行中值滤波处理,以消除噪声干扰,再对图像进行边缘提取和二值化处理,将车道标识线信息与道路背景信息相分离,然后对车道线进行识别,求取它的代表点,得到代表点序列后再对其进行修复,提取每个代表点序列的起始点、终止点,之后对间断标识线进行拟合连接,将重构后的车道线显示到输入图像上,最后根据偏离预警决策算法来判断车辆当前是否发生偏离车道线的情况。该算法的基本流程图如图1所示:
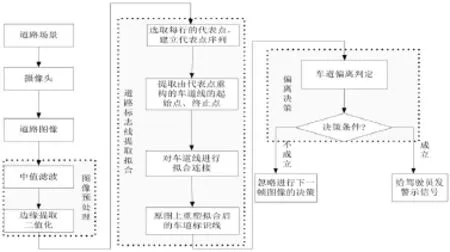
图1 车道偏离预警系统算法的基本流程
3 车道偏离预警算法处理过程
(1)道路图像预处理
图像预处理主要包括:中值滤波、边缘提取以及二值化处理[2]。通过中值滤波处理使得由外部环境所引起的干扰噪声得以消除或衰减;通过边缘提取和二值化处理对车道标识线进行识别,将标志线与路面信息相分离,以便于下一步的操作。
①道路图像中值滤波
中值滤波是一种既能去除噪声又能保护目标边界不被模糊的空域滤波法。其思想是:将每个像素点的灰度值用它邻域移动窗口内的所有像素点的灰度值的中值来替代,可表示为:

②道路图像二值化
灰度图像其灰度级变化范围为[0,255],本文选取与图像平均灰度相关的值作为边缘提取的分割阈值,对图像进行二值化处理。设表示处像素点的灰度值,T表示临界灰度值,则二值化处理可表示为式(b),这里选取作为临界灰度值T。

(2)道路标志线的提取及拟合
道路图像经预处理之后,得到道路标识线的二值化图像。接下来任务是对二值化处理之后的图像进行识别,提取每行图像中车道线的代表点序列,对每个代表点序列的起始点和终止点进行搜寻记录,根据记录信息进行车道线的拟合,再将拟合之后的车道线反标回原输入图像中。
①代表点的选取
根据车道标识线在横向上具有一定的宽度、在竖向上具有一定的长度这两大形态特征,可以判定:经过预处理之后车道线不会为零零散散的孤立点。所以,该算法对每行图像进行扫描,选出每行中连续点数大于2的像素点组成连续点组,对每一个符合条件的连续点组求取它的中间点将其作为该组的代表点。
②车道线起始点和终止点提取
道路标识线在纵向延伸表现为三种情况:竖直、右倾斜、左倾斜。故经过代表点选取后,连续两行中的同一标识线也符合上述三种情况。因而,在进行终止点提取时,可运用这一规律进行代表点链码的追踪。

在搜索追踪的过程中,凡是满足条件的像素点,在被搜索之后,改变其灰度值,便于后续搜索过程中不会将它重复搜索;如果任何一方向均不满足,则认为该点为终止点。当搜索到一条标识线的起始和终止点坐标后,便可以计算出这两点间直线的斜率k。将每次搜索所得到的车道标识线链码的起始点坐标(start_ i,start_j)、终止点坐标(end_i,end_j)、斜率k,以及本次搜索得到的标识线序号,存入对应的数组寄存器中。
③车道线的拟合
在汽车安全辅助驾驶中,车道标识线的拟合是一个至关重要的环节。目前,对于车道线的拟合方法有很多,本文采用递归二分折线拟合法对车道标识线进行拟合。由于道路图像在纵向上的延伸形状不定,这就使得标识线的曲线形状也难以确定。为了能够兼容各种车道标识线,在递归二分折线拟合法中,用平行于道路图像横向坐标的直线将图像进行划分,这样便可得到多个划分区域,在每个小区域内的曲线可以近似的用直线来替代。如此以来,一条曲线标识线便可以用一组折线来拟合出来。
对于划分后子区域内的直线拟合,这里选取最小二乘曲线拟合算法来进行直线的拟合。其实现过程如下:
否则转到下一步。
经过上述步骤得到标识线的拟合曲线,由于车道标识线存在虚线,或者是车道线检测的时候本属于同一标志线的纵向延伸的曲线因各种原因致使检测结果为几条纵向离散的线段,为了得到道路标识线的完整拟合,必须将这些本属于同一条标识线的离散虚线段进行连接拟合。
对于虚线段的连接,主要从三个方面判断它们是否归属于同一条标识线,第一点考虑两条线段的斜率差,第二点看待合并的两条直线之间的横向距离,第三点考虑两条直线的纵向间距。
④原图上显示拟合后的车道线
经车道标识线拟合之后,将拟合出来的曲线显示在原视频图像上,给驾驶员直观的视觉感受。具体实现方法就是根据每条拟合直线方程,在图像上对应的行列上用醒目的颜色绘制出拟合之后的标识线。
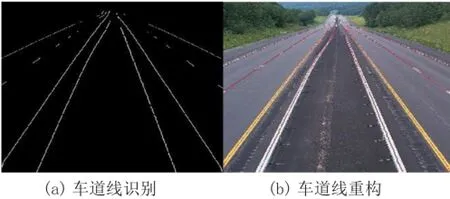
图2 虚线段的连接示意图
以上各步骤的处理结果如图2所示,图2 (a)是对车道线进行直线拟合后的效果图,但还未进行虚线段的连接,图2 (b)为拟合之后的车道线在输入图像上的重构。
(3)偏离预警
车道偏离预警采用CCP模型 (Car’s Current Position,车辆在车道中的当前位置),该模型根据车辆在车道中的位置进行车道偏离判决。假设车辆的中心位置与车道的中心之间的距离为,车辆自身的宽度为,车道的宽度为,且车辆与车道的方向大致平行,则此时车辆的前车轮相对于车道左右边界的位置可表示为式(d):
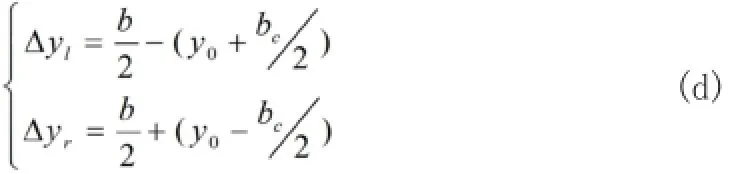
在实际应用中,对于车辆在当前车道中的具体位置以及道路的宽度是依据CCD摄像头自身的参数,及其安装的位置、高度、方向等参数,再结合道路的具体参数信息进行获取。
4 结束语
本文先介绍了车道偏离预警算法的基本流程,然后分步骤阐述了图像预处理过程及仿真情况,道路标志线识别的处理过程及仿真结果,最后根据CPP模型进行车道偏离的预警。实验表明,该方法能够正确分析车道中的位置信息,当车辆偏离车道时及时给予报警。
[1] 董因平.高速汽车车道偏离预警系统的算法研究:[博士学位论文][D].吉林:吉林大学,2004.
[2] 江明,刘辉,黄欢.图像二值化技术的研究[J].软件导刊,2009.
[3] 阮秋琦,阮宇智等.数字图象处理(第二版)[M].北京:电子工业出版社,2003.
[4] 许波文,张建明,刘志强.基于分段归类拟合算法的车道线监测系统[J].计算机工程与设计,2009.
[5] Xun Dai,Anton Kummert,Su Birm Park,et al.A Warning Algorithm for Lane Departure Warning System[C]. Proc.IEEE Intelligent Vehicles Symposium,2009.
[6] 葛平淑.车道偏离预警视觉系统算法改进研究[D].吉林:吉林大学,2008.
苏春莉,女,生于1977年,陕西省蒲城县人,汉族,讲师,硕士。研究方向:嵌入式开发、数字图像处理。
由此可知,端口网络等效电阻消耗的功率一般不等于端口网络内部消耗的功率,因此当负载获取最大功率时,电路的传输效率并不一定等于50%,一般小于50%。
5 结论
最大功率传输原理是电路理论中的重要定理,在教学设计过程中,注重教学方式方法更利于学生的学习掌握;在应用最大功率传输原理时,必须注意其使用的前提条件,否则可能得出错误结论。根据具体的电路求解最大功率的方法不尽相同。
参考文献
[1] 邱关源 电路(第四版)[M]北京:高等教育出版社,2000
[2] 左全生.负载阻抗受限制情况下的最大功率传输的研究.常州工学院学报.2008.21(2)
[3] 张伟.张蛟龙 韩素敏.“电路”中最大功率传输定理的教学方法探讨.科技信息.2003
[4] 白乃平.电工教材[M].西安:西安电子科技出版社,2011
[5] 冯志军.项目课程课例开发的实践与思考[J].中国职业技术教育,2010,(35)
[6] 刘秀成,黄松岭,于歆杰,陆文娟.关于最大功率传输问题的讨论[J].南京:电气电子教学学报,2008,30(1)
[7] 吕伟锋,董晓聪.电路分析实验[M].北京:科学出版社,2010,5
[8] 王光义.实验教学理念与创新能力培养[J].实验室研究与探索,2008,27(8):76-78.
Research on Lane Departure Warning Algorithm
Suchunli,Limei
(Information Engineering Institute,Xi’an Eurasia University,Xi’an,710065,China)
This paper mainly do some research on the lane departure warning algorithm.Based on the basic flow algorithm,it mainly describes the image preprocessing,lane recognition and departure warning three steps.Experiments show that,this method can correctly analyze the lane in the position information,when thevehicle lane departure timely alarm.
Lane recognition;Image preprocessing;Deviation decision
陕西省科技厅自然科学基础研究基金资助项目(No. 2012JM8027)
