并联隔振平台驱动装置*
2014-02-11张春凤
张春凤,赵 辉
(郑州航空工业管理学院,河南郑州 450015)
并联隔振平台驱动装置*
张春凤,赵 辉
(郑州航空工业管理学院,河南郑州 450015)
并联隔振平台在多轴低频隔振方面获得广泛应用。其驱动装置对平台性能具有重要的影响作用。由于并联隔振平台结构的特殊性,其驱动器的输出力与负载之间不是简单的线性关系,给驱动器的选择带来困难。使用并联隔振平台的静力平衡方程较好地解决了上述问题。同时,围绕并联隔振平台驱动装置,完成了控制器、驱动器、音圈电机等的选择,并给出了驱动原理图,为设计并联隔振平台驱动装置提供了一种新思路。
并联隔振平台;驱动控制系统;静力平衡方程
0 引言
近年来,制造、测量等朝着高精度方向不断发展,对环境提出了越来越高的要求。而振动对制造和测量过程及结果都有很大的影响,因此,对相关敏感设备需要进行有效地振动隔离。研究表明,在工厂内测量得到的地面振动频率上限为30~40 Hz[1]。而在敏感光学设备、机载精密装置以及卫星隔振等方面研究也表明,需要隔离的振动均为多维低频振动[2-3]。
Stewart平台因为具有刚度大、结构稳定、承载能力强等特征,在多轴低频隔振方面获得了广泛的应用。如美国IAI公司的Geng和Haynes对6自由度主动隔振Stewart平台进行了结构上的改进,设计出性能良好的“立方体结构”,并将该平台用于太空中空间结构的隔振[4]。北京航空航天大学大学的崔龙和黄海提出了大行程的Hexapod隔振平台用于车载和机载光学设备的主动隔振[5]。Preumont等基于Stewart平台,设计了以音圈电机为动力的驱动杆,获得每十倍频程衰减40 db的效果[6]。
本文针对以音圈电机为动力的并联隔振平台,讨论了其驱动装置的设计问题。
1 并联隔振平台
并联隔振平台采用“立方体结构”的Stewart平台。该结构实际上是将一立方体的两个相对顶点去掉后构成的一类Stewart平台,如图1所示。并联平台的6根支撑杆AiBi就是该立方体的棱,该支撑杆可伸缩,从而引发上平台运动;而去掉两个相对顶点后形成的两个平面A1A2A3和B1B2B3则分别构成了并联平台的上平台和下平台。采用这种结构,隔振平台的对称性好,机械结构设计便利;更为重要的是,平台的运动关系简单且具有一定的各项同性特征,便于实现对驱动装置的控制,因此,此结构获得了较为广泛的应用[7-9]。

图1 隔振平台结构示意图
为了对Stewart平台进行分析,首先建立坐标系。取其几何中心O为参考坐标系的原点,Z轴垂直平面A1A2A3向上(在图1中并未绘出),X轴和Y轴均和平面A1A2A3平行。
在上平台工作时振幅和转角不大的情况下,并联隔振平台的动力学方程为:

其中:
x为上平台的微位移,x=(xa,ya,za,θx,θy,θz)T;
M 为上平台的质量矩阵;
B为隔振平台的力雅克比矩阵;
K为隔振平台的刚度矩阵;
f为各支撑杆中的主动力,f=(f1…f6)T。
根据隔振要求进行了机械设计工作,获得隔振平台的主要参数为:支撑杆长320 mm、杆伸缩范围±10 mm、上平台质量为10 kg、载荷重量为5 kg;其上、下两个平台的结构和尺寸完全相同,6根支撑杆的结构和尺寸也完全相同;该平台使用直线式音圈电机驱动,平台的3维模型见图2。
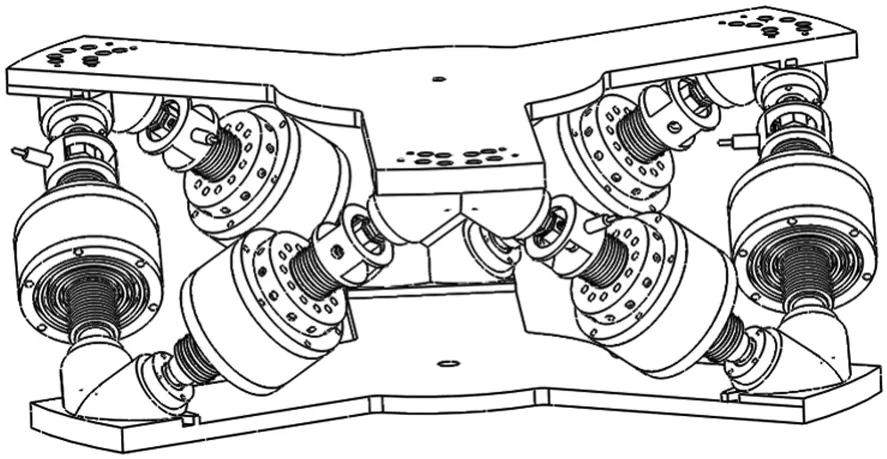
图2 并联隔振平台的3维CAD模型
2 驱动装置设计
此隔振平台主要工作在低频状态,工作频率范围为:10~100 Hz;其工作时上平台运动最大范围为1 mm。这样的工作频率和运动范围是音圈电机非常适合的应用场合。因此选择音圈电机作为驱动器。
音圈电机可以看做是需要换向的有刷直流电动机。其控制系统除音圈电机外一般包括控制器、驱动器和负责反馈音圈电机工作状态的传感器等,整个控制系统如图3所示。天津大学的黄田等针对并联机床提出了基于奇异值分解的伺服电机参数选择方法[10],该方法具有一定通用性。除此之外,尚未见到专门文献介绍驱动装置参数的选择。本节将结合并联隔振平台,用智能优化算法来选择驱动装置的核心参数。

图3 音圈电机控制系统
2.1 选择音圈电机
音圈电机的选择主要分两步,先进行试选,之后针对选择电机进行校核,具体过程见图4。
首先,要根据工作情况选择音圈电机的形式。音圈电机主要有两种形式:转(摆)式和伸缩式。由于隔振平台的特点,选择伸缩式音圈电机。
试选音圈电机时,在满足工作行程要求前提下,主要考虑音圈电机的输出情况、如最大输出力、稳态输出力和速度等。
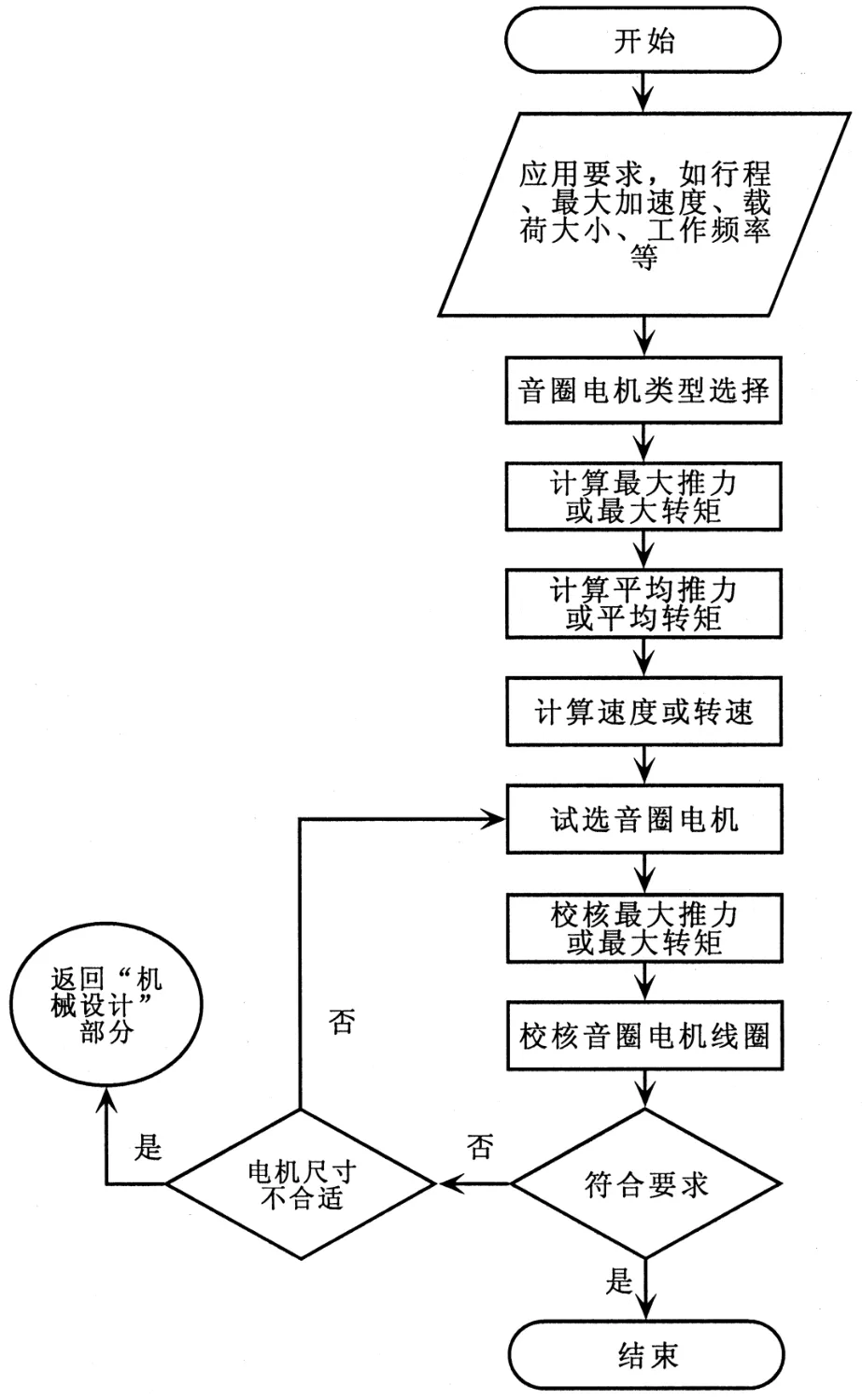
图4 音圈电机选择过程
在选择音圈电机时,关键内容之一是选择音圈电机的输出力。一般做法是根据音圈电机的工作情况进行估计。但是,这种做法考虑的都是直接驱动负载的情况,而并联隔振平台中的各个驱动器相互协同工作,共同承担负载。这样就带来新的问题:原有音圈电机选择计算方法主要针对直接驱动形式,并不适用于并联隔振平台。为了解决此问题,需要建立并联隔振平台输入和输出之间的力映射关系。并联隔振平台的静力平衡方程有机联系了平台负载和驱动器输出力,为解决上述问题提供了可能。下面利用并联隔振平台的静力平衡方程来估计所需音圈电机的输出力。
利用平台的力雅克比矩阵,可求出各支撑杆上的力 fi。对于Stewart平台,忽略支撑杆的变形,有:

其中:F为上平台上所受外力,这里为重力及负载。
由式(2)可知:

由式(3)可以求出每台音圈电机需承担的力为28.32 N。
当音圈电机工作在非平衡状态时,可以利用达朗伯原理,将加速度通过附加力来处理。此时,可以对音圈电机载荷进行估算。当在垂直方向上加速度为4 m/s2时可以算出单台音圈电机的载荷为169.91 N。
采用上述方法可以解决原有方法存在的问题,较好地解决并联隔振平台音圈电机选择问题。
按照上述过程进行计算分析,选择BEI公司型号为LA30-48-000A的音圈电机。该电机的主要参数见表1。从表中可以看出,其相关参数,如最大推力、连续推力、行程等都能够满足需要。
还需要说明的是,和传统机械装置相比,并联隔振平台设计过程中,音圈电机和机械结构关系更为密切,音圈电机的长度及半径等尺寸都对隔振平台的尺寸有着决定性的影响。当选择的音圈电机在工作参数方面都能够满足要求而几何尺寸不能满足要求时,需要重新选择隔振平台的尺寸,并进行新一轮的音圈电机选择。

表1 音圈电机的主要参数
2.2 音圈电机驱动器及控制器
其常见的驱动系统有两种:一种是采用PWM功率变换器;另一种则是采用线性功率放大器。仿真分析表明:当音圈电机做低频较大位置跟踪时,可以选用斩波的方式;而做小位置的无差高频位置跟踪时,可以选择功率放大器作为驱动器[10]。从并联主动隔振平台的设计要求可以看出,其特点是低频、小位移。考虑到采用PWM功率变换器时,具有无超调的优点,因此选择采用PWM功率变换器作为音圈电机的驱动器。
经过比较,选用TI公司的全双桥PWM驱动器DRV8432[11]。该驱动器工作在并联状态时,可以提供14 A的持续电流输出,峰值电流可达24 A,完全可以满足音圈电机驱动需要;其开关频率最高可达500 kHz;且其工作效率高达97%,利于节约能源。
DRV8432驱动器需要根据控制器提供的PWM信号来实现对音圈电机的控制。选择PMAC2A-PC104作为控制器,同时选用ACC-8FS接口板来实现输出PWM信号。
PMAC2A-PC104采用40 MHz的DSP563XX,每通道输出±10 V电压,通过ACC-8FS可以产生PWM信号。同时,PMAC在传统的PID控制算法的基础上,加上速度和加速度前馈。用速度前馈来减小微分增益或测速发电机环路阻尼带来的跟随误差,用加速度前馈来补偿由于惯性所带来的跟随误差,同时使用陷波滤波器来防止谐振,从而实现快速、准确地控制电机[12]。
3 结论
本文在分析并联隔振平台特性的基础上对其控制系统进行了设计,具体内容如下:
(1)分析了并联隔振平台几何结构,获得了动力学方程,并结合并联隔振平台静力学方程,对音圈电机输出力要求进行了估算;
(2)经过计算,选择了合适的音圈电机,并为音圈电机匹配了驱动器和控制器。
[1]朱石坚,楼京俊,何其伟,等.隔振理论与隔振技术[M].北京:国防工业出版社,2006.
[2]刘磊,王萍萍,孔宪仁,等.Stewart平台动力学建模及鲁棒主动隔振控制[J].宇航学报,2011,32(6):1231-1297.
[3]吕俊超,陈照波,焦映厚,等.基于音圈电机的Stew⁃art主动隔振平台设计[J].机械设计与制造,2013(2):62-65.
[4] Z.Jason Geng,Leonard S.Haynes.Six Degree-of-Free⁃dom Active Vibration Control Using the Stewart Platforms[J].IEEE Transactions on Control Systems Technolo⁃gy,1994,2(1):45-53.
[5]崔龙,黄海.大行程Hexapod平台及其隔振实验[J].北京航空航天大学学报,2010,36(6):671-675.
[6] A.Preumont,M.Horodinca,I.Romanescu,etl.A six-axis single-stage active vibration isolator based on Stewart platform[J].Journal of Sound and Vibration,2007,300(3):644-661.
[7]P.Han,T.Wang,D.H.Wang.Modeling and Control of a Stewart Platform Based Six-Axis Hybrid Vibration Isola⁃tion System[A].Proceedings of the 7thworld congress on intelligentcontroland automation [C].June 25-27,2008,Chongqing,China.
[8]HANIEH A A.Active isolation and damping of vibrations via Stewart platform[D].Brussels:University of Brus⁃sels,2003。
[9]于大国,马履中,郭洪锍,等.多维隔振装置自由振动方程及其解[J].农业机械学报,2009,40(6):184-188.
[10]黄田,赵兴玉.并联机床伺服进给电机参数选择的一种方法[J].自然科学进展,2001,11(5):522-529.
[11]李立毅,刘丽丽,吴红星.音圈电机位置伺服系统电流驱动器的两种设计方法研究[J].微电机,
2011,44(11):60-63.
[12]TI公司.DRV8432 12A双路刷式直流或单路双极步进电机驱动器(PWM控制器)[EB/OL].http://www. ti.com.cn/cn/lit/ds/sles242d/sles24 2d.pdf.
[13]梁辉,李红芳.基于PMAC运动学的并联机构力控制研究[J].机械设计与制造,2011(8):124-126.
A Study on a Driving Device of Parallel Isolation Platform
ZHANG Chun-feng,ZHAO Hui
(Zhengzhou Institute of Aeronautical Industry Management,Zhengzhou450015,China)
Parallel isolation platform is widely used in multi-axis low-frequency vibration isolation.Its driving device has a significant effect on the platform performance.It is difficulty to choice the driving motor due to that the relationship between the driving motor’s output force and the load is not linear.In this paper,parallel isolation platform’s static equilibrium equation is used to solve the above problem.The controller,drive,and voice coil motors are selected and the driver schematic is illustrated,It is a new idea for the design of the parallel isolation platform’s driving device.
parallel isolation platform;driving device;static equilibrium equation
TB535.1
A
1009-9492(2014)08-0058-04
10.3969/j.issn.1009-9492.2014.08.017
张春凤,女,1976年生,河北抚宁人,硕士,讲师。研究领域:智能优化与计算机应用。已发表论文8篇。
(编辑:向 飞)
*河南省科技厅科技攻关项目(编号:112102210453);郑州航院青年基金项目(编号:2012103001)
2014-04-17