多绳摩擦式提升机双闭环直流调速系统仿真研究
2014-02-10孙慧峰彭秋红
孙慧峰,彭秋红
(平顶山工业职业技术学院,河南平顶山 467001)
多绳摩擦式提升机双闭环直流调速系统仿真研究
孙慧峰,彭秋红
(平顶山工业职业技术学院,河南平顶山 467001)
为保证设计的提升机直流调速控制系统的可靠性,对设计的直流调速控制系统进行仿真研究,仿真方式是基于SIMU⁃LINK中动态结构框图的仿真,仿真步骤是按照控制系统先内环后外环的原则,首先对电流内环进行仿真,并根据一定的近似条件,将电流内环从双闭环中独立出来,然后配置数据进行仿真,从仿真结果中观察提升机控制系统的跟随性。对双闭环直流调速模型的仿真是在电流内环的基础上进行的,用来观察提升机直流传动系统的起动过程中检验提升机系统的整体性能指标,包括动态性能指标和抗扰性能指标。
多绳摩擦式;提升机;双闭环;直流调速系统;仿真研究
0 引言
为保证设计的提升机直流调速控制系统的可靠性,本文主要从调速系统电气控制原理设计、调速系统动态抗扰性能分析及调速系统动态仿真等几方面进行论述,仿真结果表明,设计的调速系统是合理的,能满足提升机工作时的各项性能要求。
1 双闭环直流调速系统电气控制原理设计
结合提升系统实际数据分别对电流环和转速环的参数进行设置,并运用SINMULIK工具箱中的传递函数对其进行动态仿真的设计。直流调速系统电气控制原理设计时按照先内环后外环的设计原则,从内环开始,逐步向外扩展。首先设计电流调节器,然后把整个电流环看作是转速调节系统中的一个环节,再设计转速调节器,其滤波环节包括电流滤波、转速滤波和两个给定信号的滤波。由于电流检测信号中常含有交流分量,为了不影响调节器的输入,需加低通滤波,然而增加低通滤波环节后,在抑制交流分量的同时滤波环节也延迟了反馈信号的作用,为了平衡这个延迟作用,在给定信号通道上加入一个同等时间常数的惯性环节,其作用是让给定信号和反馈信号经过相同的延时,使二者在时间上得到恰当的匹配,从而保证仿真效果与实际的一致性。由于测速发电机得到的转速反馈电压含有换向纹波,因此也需要滤波,根据和电流环一样的道理,在转速给定通道上也加入时间常数给定滤波环节。为满足以上所说环节的实现,设计的双闭环直流调速控制系统电路原理如图1;转速、电流双闭环直流调速控制系统结构如图2所示。

图1 调速控制系统电路原理图
2 双闭环直流调速系统动态抗扰性能分析
在直流调速提升机调速动态系统中,最重要的动态性能是抗扰性能。抗扰性能主要包括抗电网电压扰动和抗负载扰动两方面。
2.1 抗电网电压扰动
在图2所示的调速控制系统中,由于增设了电流内环,这就使系统不仅具备了单闭环抗负载扰动的优点,对电压扰动的干扰也增强了,电压波动可以通过电流反馈得到及时的调节,不必等它影响到转速以后才能反馈回来,这使抗扰性能得到很好的改善。
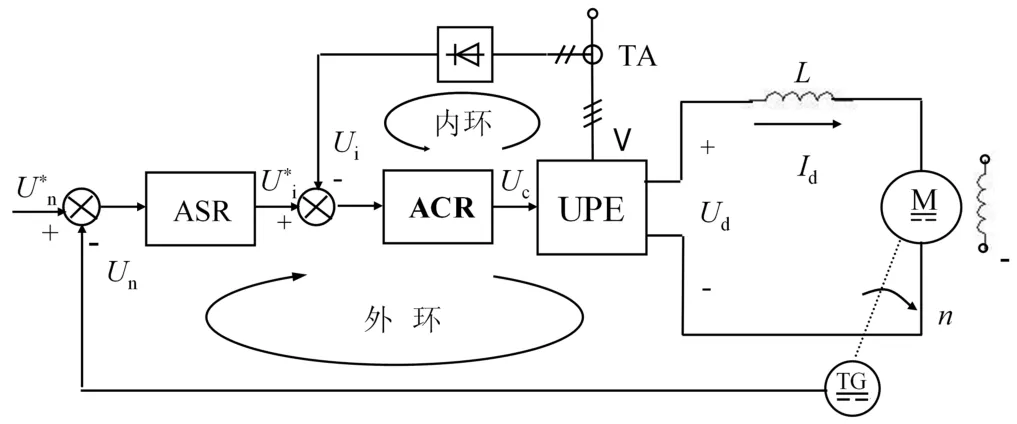
图2 转速、电流调速系统结构图
2.2 抗负载扰动
结合图2可以看出,负载扰动作用在电流环之后,只能靠转速调节器ASR来产生抗负载扰动的作用。因此在设计ASR时应选用有较好抗扰性能指标的元件。
2.3 转速和电流两个调节器的作用
2.3.1 转速调节器的作用
(1)转速调节器是调速系统的主导调节器,它使转速n很快地跟随给定电压变化,稳态时可减小转速误差,如果采用PI调节器,则可实现无静差调速;
(2)对负载变化起抗扰作用;
(3)其输出限幅值决定电机允许的最大电流。
2.3.2 电流调节器的作用
(1)作为内环的调节器,在外环转速的调节过程中,它的作用是使电流紧紧跟随其给定电压(即外环调节器的输出量)变化;
(2)对电网电压的波动起及时抗扰的作用;
(3)在转速动态过程中,保证获得电机允许的最大电流,从而加快动态过程;
(4)当电机过载甚至堵转时,限制电枢电流的最大值,起快速的自动保护作用,一旦故障消失,系统立即自动恢复正常。
2.4 控制系统的动态性能指标
2.4.1 跟随性能指标
在给定信号或参考信号的作用下,系统输出量的变化情况可用跟随性能指标来描述。当给定信号变化时,输出响应也随着变化。通常以输出量的初始值为零时给定信号阶跃变化下的过渡过程作为典型的跟随过程,这时的响应(动态输出量)称作阶跃响应。
2.4.2 抗扰性能指标
在系统稳定运行中,突加一个使输出量降低的扰动量F后,输出量由降低到恢复的过渡过程是系统典型的抗扰过程,常用的抗扰性能指标为动态降落和恢复时间。
(1)动态降落:系统稳态运行时,突加一个约定的标准负扰动量,所引起的输出量最大降落值称作动态降落,调速系统突加额定负载扰动时转速的动态降落称作动态速降。
(2)恢复时间:从阶跃扰动作用开始,到输出量基本恢复为稳态,距新稳态值之差进入某基准值的(或取)范围之内所需的时间,定义为恢复时间。
实际控制系统对于各种动态指标的要求各不相同。对于矿井提升机而言,以抗扰性能为主,但对跟随性能也有一定的要求。
3 系统动态仿真
3.1 仿真方法
仿真步骤是先按照计算结果选用相关元件制作仿真模型,然后选择仿真数据,把仿真数据输入到仿真模型后,得出仿真结果,分析仿真结果就可得出相关结论。
3.2 仿真数据
(1)提升机数据:采用ϕ4 m×4 m直联塔装摩擦提升机,提升高度H=795 m;提升速度为νm= 10 m/s;有效载荷Q=16 t;驱动轮直径为D=4 m;导向轮直径为D=4 m;钢丝绳股数为4;主轴转速n=47.75 r/min;给定速度如图3所示。系统变位到滚筒边缘的变位质量∑m=114 463 kg。

图3 提升机给定速度图
(2)电动机数据:GLC8165-79116型;额定功率为2 100 kW;额定电流为2 675 A;额定转速为47.75 r/min;电枢额定电压为900 V;励磁电压为110 V;励磁功率为40 kW,转子飞轮力矩为885×103N·m2;电动机电枢电阻为Ra=0.036 6 Ω。
(3)速度数据:仿真速度数据详见图3。
3.3 仿真结果分析
3.3.1 提升机系统动态仿真
提升机直流双闭环系统动态仿真结构图如图4所示,为了使系统简洁,将图2中的ASR和转速调节器采用同样的PI调节器,并采用了同样的限幅环节,最大限幅设为10,最小定为-10。将转速环的参数代入仿真软件,即得到提升机直流双闭环动态系统的仿真图。
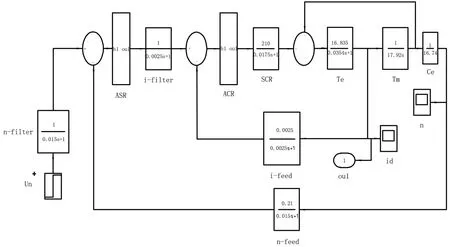
图4 双闭环直流调速系统仿真模型图
3.3.2 双闭环直流调速系统仿真结果与分析
(1)模型仿真参数设定。仿真算法采用ode15,仿真时间为8 s。输入阶跃开始时间为0.2 s。
(2)启动仿真系统。在SIMULINK环境下运行图4,即得到转速的动态仿真波形图和电枢电流的动态仿真波形图,为了便于观察,将输出转速值放大,使之与电枢电流值在一个窗体上显示,同时将仿真时间改为5 s,其输出见图5。
(3)突加负载后的系统仿真波形如图6,抗电网电压扰动特性仿真波形如图7。
4 结语
通过如上的仿真分析,可得出如下结论。
(1)如图5所示的电动机起动电流特性已十分接近理想特性。所以该系统对于起动特性来说,已达到预期目的。
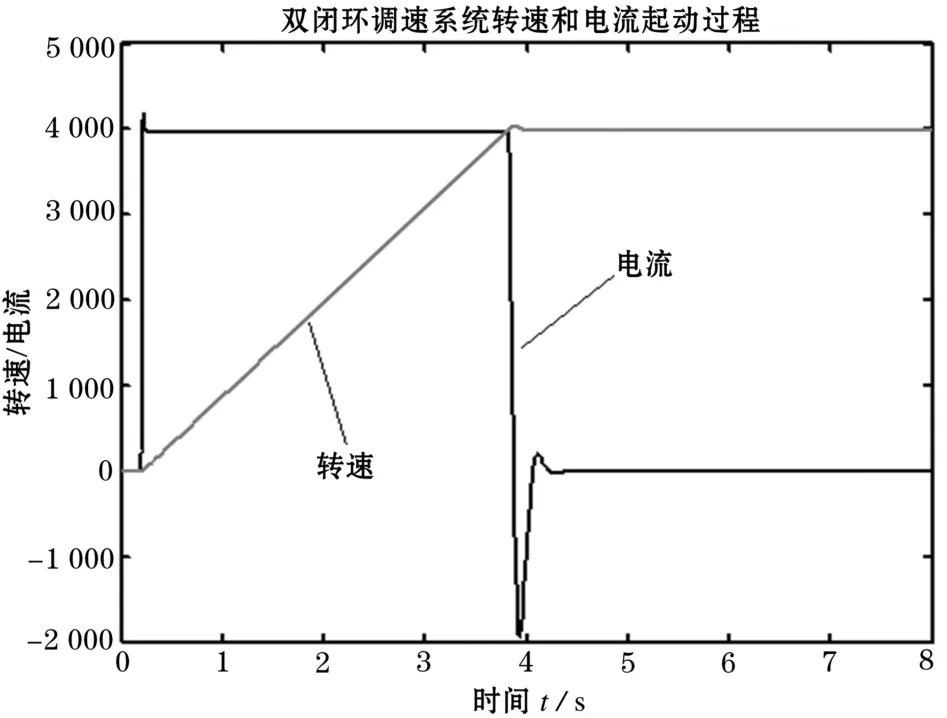
图5 双闭环直流调速转速与电流启动过程对照图
(2)抗负载突变性能分析。在t=5 s时突加IdL=2 000 A,系统仿真输出波形如图6所示。由图6可知,在突加负载后系统速度下降△n= 0.27 r/min,恢复时间t=0.23 s,抗负载突变性能良好。

图6 突加负载后的系统仿真波形
(3)抗电网电压波动性能分析。在t=5 s时,在变流环节SCR的后面突减△U=200 V,系统仿真输出波形如图7所示,由图7可知,在突加干扰后,电枢电流出现波动,但转速几乎无变化,只下降了0.06 r/min,恢复时间t=0.29 s,由此可知系统抗电网电压波动性能也合乎要求。
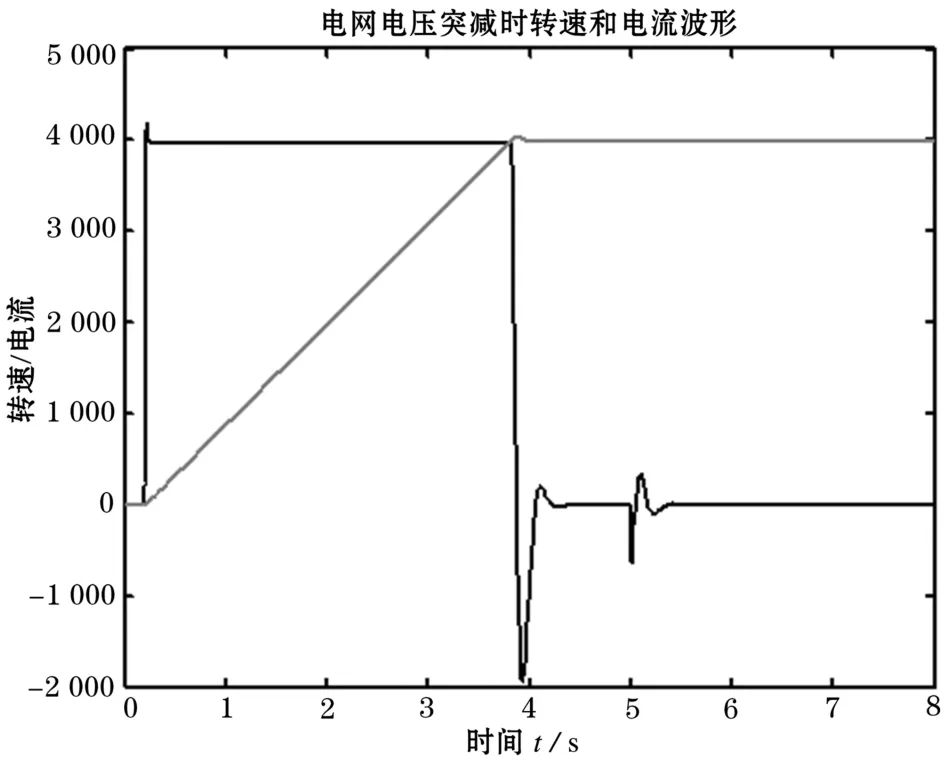
图7 抗电网电压扰动特性仿真波形图
因此认为,该提升机的双闭环直流调速系统的电气控制原理设计是合理的,能满足实际使用的基本要求。
[1]黄仰金.矿井副井提升机计算机控制系统设计与应用[D].长沙:中南大学,2004.
[2]赵荣理.基于Matlab/Simulink的异步电动机变频调速系统的仿真研究[D].太原:太原理工大学,2002.
[3]王清灵,龚幼民.现代矿井提升机电控技术[M].北京:机械工业出版社,1996.
[4]陈为信.姚桥矿副井提升机全数字电控系统的研究[D].徐州:中国矿业大学出版社,2003.
[5]李颖.Simulink动态系统建模与仿真基础[M].西安:西安电子科技大学出版社,2004.
[6]徐家蓓.控制系统数字仿真[M].北京:北京理工大学出版社,2004.
[7]张森,张正亮.MATLAB仿真技术与实例应用教程[M].北京:机械工业出版社,1999.
[8]钱积新,王慧,邵之江.控制系统的数字仿真及计算机辅助设计[M].杭州:浙江大学出版社,1995.
[9]卢燕.矿井提升机电力拖动与控制[M].北京:冶金工业出版社,2001.
Simulation Research for the Double Loop DC Speed Control System of Multi Rope Friction Hoist
SUN Hui-feng,PENG Qiu-hong
(Pingdingshan Industrial Vocational and Technical College,Pingdingshan467001,China)
In order to guarantee the reliability design of hoist DC speed control system,the simulation research of the DC speed control system design was done,emulation mode was the simulation of dynamic structure diagram based on the SIMULINK,simulation process was under the principle of control system inner ring first outer ring after,carries on the simulation of the inner current loop,and according to the approximate conditions,the inner current loop will be separated from the double closed loop,and then configurated data for simulation,observed following performance of elevate machine control system from the simulation results.The simulation of double closed loop DC speed control model was based on the current loop,which used to observe the overall performance index system inspection enhance the starting process of the DC transmission system of the machine,including dynamic performance and anti-disturbance performance index.
multi-rope friction;hoist;double closed loop;DC speed control system;simulation
TP272
A
1009-9492(2014)02-0065-04
10.3969/j.issn.1009-9492.2014.02.019
孙慧峰,女,1972年生,河南洛河人,工程硕士,副教授。研究领域:电气自动化。
(编辑:向 飞)
2013-07-08
