六轴水浸式超声C扫描自动成像系统的研制
2014-02-10丁旭升陈坤裕
丁旭升,陈坤裕
(广东汕头超声电子股份有限公司,广东汕头 515041)
六轴水浸式超声C扫描自动成像系统的研制
丁旭升,陈坤裕
(广东汕头超声电子股份有限公司,广东汕头 515041)
研制了一种具有六个自由度的水浸超声C扫自动成像系统,可以对平面、圆柱体、复杂曲面零件进行检测。采用IPC作为运动控制的核心处理部分,运动控制卡负责整个运动控制细节,并以C++Builder为工具,开发了具有开放式、通用式、灵活式的运动控制系统软硬件平台。经过实际生产运行证明,该系统稳定可靠,检测的精度高,可重复性好。
超声C扫描;水浸式;六轴;自动成像
0 引言
过去十年,图像化超声检测已经成为超声检测发展趋势。国内的图像化超声发展落后于国外若干年,近年来随着自动化非标准设备行业的飞速发展,自动化行业与超声检测的结合越来越紧密。自动化的超声检测系统成为实现图像化超声检测的必备途径。超声波C扫描技术是对超声检测数据进行C型显示。超声波C扫描检测能够给出图像化的检测结果,能直观显示被检测工件的某一深度范围内的缺陷信息,缺陷的定量、定性、定位更加准确,减少了人为因素的影响[1]。
目前,外资公司占据了国内超声波C扫描检测系统高端市场主要份额。外资公司的产品以中型和大型设备为主,硬件设备性能优良,软件功能强大,但是系统的售价很高,维修成本高,维修周期较长[2]。对此,本文通过对超声C扫描系统工作原理的研究,成功研制出一套高精度、高质量、高分辨力的用于水浸超声波检测的六自由度自动C扫描成像系统,其成本只有进口设备的五分之一。经过实际生产运行证明,该系统稳定可靠,维护方便,并且检测的精度高,具有良好的可重复性以及对外形复杂工件的良好适应性。
1 系统的原理及构成
六自由度超声C扫描自动成像系统是为了自动检测平面、弧面和复杂曲面的零部件内部缺陷而设计的,该系统由六自由度机械扫描装置、CTS-04PC型超声探伤卡、IPC工控机、运动控制卡、电机驱动控制单元、计算机软件和系统控制柜等组成,如图1所示。
检测方法是:首先将被检测零件的表面特征信息输入控制系统,由控制系统进行编译处理,然后输出控制信号给运动控制卡,接着运动控制卡发出指令给电机驱动控制单元,控制伺服电机或是步进电机运转,机械扫描装置带动探头沿着与被检测零件表面法线相平行的方向进行扫描。同时CTS-04PC型超声探伤卡发射高频脉冲信号给超声探头,接收超声探头的回波信号,并对数据进行采集,然后把得到的数据反馈给IPC工控机,由IPC工控机软件进行处理和成像。伺服电机(或是步进电机)再通过丝杆(或是蜗杆、齿轮)带动探头向下一个检测点移动。此外,外触发信号是由运动控制卡根据电机编码器的位置反馈输出CMP信号进行同步,使得采集数据和实际位置相对应[3]。
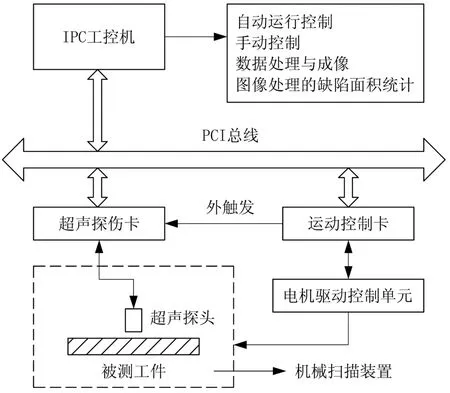
图1 水浸超声检测系统的工作原理
2 机械扫描装置的研制
机械扫描装置的作用是带动探头沿着被检测零件表面运动,为了保证在检测过程中探头方向始终与零件上被检测点的法线重合[4],设计了六自由度运动系统,三个移动自由度控制探头运动的空间位置,两个旋转自由度控制探头旋转方向,一个旋转自由度控制滚筒旋转方向。机械扫描装置主要由三坐标龙门系统模块、探头部件、滚轮部件、工作台、透明水槽及铝框架等组成,如图2所示。

图2 自动扫描机械结构
2.1 直线运动机构
直线运动机构实现x、y、z三个方向的单独或是组合步进扫描运动。传动形式采用螺杆式传动集成模块直线执行机构,即采用滚珠螺母(滑座)移动,丝杆转动,再加两侧直线导轨来支撑导向的运行方式,伺服电机与丝杆通过联轴器相连。直线运动机构采用三坐标龙门系统模块,不但能实现重复性高的精密执行运动,而且装配、调试、维护比较容易。龙门系统模块现在已经很成熟了,市场上能够根据需要购买到标准化(或是客制化)产品。
2.2 旋转运动机构
旋转运动机构主要由探头部件和滚轮部件组成,其结构简图如图3所示。

图3 旋转运动机构
探头旋转方向经由两个旋转自由度来控制,保证在被测点位置探头声束与被检测的表面的法线平行[4]。采用一个步进电机与蜗杆通过联轴器相连,带动固定在另一端部的蜗轮绕x轴旋转,因探头夹具与蜗轮相连固定,从而实现探头夹具绕x轴旋转运动;另一个步进电机通过齿轮直接带动整个探头部件绕y轴旋转,从而实现探头夹具绕y轴旋转运动。该种方式结构简单,保证电机在整个探伤检测过程中不浸泡在水中,可靠性高,但对电动机及机械结构有较高的要求。
滚轮旋转方向经由一个旋转自由度来控制,保证被检测零件所有表面都处于探伤的有效范围,不出现扫描盲区。采用伺服电机经由减速电机,通过同步带带动滚筒的传动方式。
3 控制系统硬件的研制
运动控制系统采用开环与闭环相结合的控制方式,由控制装置、执行机构、被控对象等部分组成,能控制探头或是滚筒按预定的轨迹运动,即通过计算机将输入的信息进行编译和处理,变成指令信号,送给运动控制卡,当运动控制卡接收PC指令后,向四台交流伺服驱动器和两台直流步进驱动器发出运动脉冲控制信号,经过驱动器放大后驱动电机,使各坐标轴运动的电动机按照相应的频率和角度运行。考虑到系统的运算速度和检测的实时性,采用IPC工控机作为本系统的上位机,由它来完成插补运算、速度控制、方向控制等功能。下位机为运动控制卡,主要负责整个运动控制细节,包括脉冲和方向信号的输出、自动升降速的处理、原点和限位等信号的检测等。系统结构如图4所示。这种控制可实现上位机对各个运动坐标轴的单轴单独控制和多轴联动控制。
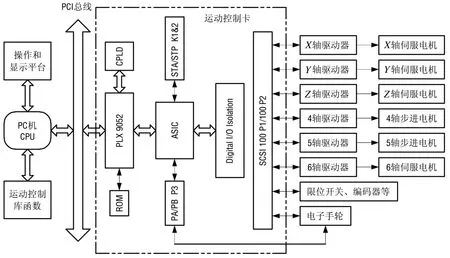
图4 运动控制系统结构图
3.1 控制系统上位机设计
上位机主要功能有:控制系统的初始化、提供控制接口、探头运动轨迹的规划、控制指令的发送、在线修改运行参数、综合优化控制算法的实现、数据处理与成像、数据存储、监控系统运行、报警及故障显示和管理权限等。为达到工业控制的要求,系统采用研华工控机IPC-610,利用其较高的防磁、防尘、防振荡、防冲击的能力,能在高温下稳定工作并有着丰富的扩展性能。CTS-04PC型超声卡和凌华PCI-8158运动控制卡以PCI插卡形式嵌入PC机中。
3.2 控制系统下位机设计
本系统的执行元件有6台电机,考虑到以后的扩展需要(如增加输送机构、水循环模块、实时监控水位水质等的控制),所选用的运动控制卡需要能实现控制6轴以上功能,并且有可扩展性,因此选用凌华PCI-8158模块化设计的高级8轴步进和伺服运动控制卡。该卡具有以下功能:3轴螺旋插补;脉冲输出选择:OUT/DIR,CW/ CCW,AB相;脉冲输出速率:最高6.55 MHz;2~4轴线性插补;2轴圆弧插补;硬件紧急输入;在线改变速度/位置;支持手动脉冲产生(MPG)等。此外,当调试、检修或突发事件时,还可根据需要通过在电子手轮上分别旋转相应旋钮或急停按钮,旋转电子手轮,进行手动操作。
4 控制系统软件的研制
研制了六轴水浸式超声C扫描自动成像系统检测软件CTS-Scan,主要实现了超声探头的位姿控制和自动扫描检测,采用面向对象设计方法和模块化的设计思想,主要分为:参数设置、运行模块、状态显示、系统管理和帮助说明五个模块。参数设置模块负责六轴运动控制的脉冲输出控制,调节脉冲发送的速度和加速度;运行模式模块主要调整运行的方式,有自动运行模式、手动运行模式和智能运行模式;状态显示模块可以将运行状态和调整的参数实时显示;系统管理模块负责控制系统运行时的文件管理,如文件存档管理、文件编辑管理和程序编译管理等;帮助和说明主要是提供本控制软件的操作说明、各按钮的作用以及程序代码的解释。各模块通过主框架程序相互协调控制,成为一个完整统一的运动控制系统软件平台[5]。
5 结论
本次研制的六轴水浸式超声C扫描自动成像系统是一种集机电一体化技术、超声检测技术、计算机测控技术于一体的新型机电一体化超声波检测设备。经过实际生产运行证明,该系统具有操作维护方便、成本低廉、检测精度高和适应性广等优点,不仅能够提高超声检测的自动化程度、检测效率和可靠性,而且有利于缺陷的定位、定量和定性分析,为准确判定工件缺陷提供了保证,并可使用VC++、C++Builder、VB等开发工具进行二次开发,有着良好的可移植性和通用性。
[1]乔日东,张维国,郭智敏,等.多轴超声C扫描系统在车辆负重检测中的应用[J].兵器材料科学与工程,2011,34(2):99-102.
[2]杨青,刘颖韬.航空航天领域中超声波C扫描检测系统的发展与应用[J].无损检测,2012,34(7):54.
[3]杨青.四通道水浸式超声C扫描检测系统研制[J].无损检测,2012,34(7):67.
[4]姜庆昌,郭士清,沈延飞.一种面向复杂曲面的水浸超声C扫描自动检测系统设计[J].机电工程技术,2009,38(3):29-30.
[5]李颖,谭立新,张文凯.基于PC和运动控制卡的开放式运动控制系统[J].仪器技术,2007(4):47.
The Development of Six-Axis Immersion C-Scan Automatic Imaging System
DING Xu-sheng,CHENG Kun-yu
(Guangdong Goworld Co.,Ltd,Shantou515041,China)
One six degrees of freedom immersion ultrasonic C-scan automatic imaging system is developed,which can be used to check plane,cylindrical surface and complex curve parts.Using IPC as the hard core of motion control and the motion card that responsible for the motion control details,a software and hardware platform for motion control system that adds openness,flexibility and universality is developed by C++Builder.As proved by the actual operation,the system is stable,high detection precision and good repeatability.
ultrasonic C-scan;immersion;six-axis;automatic imaging
TP274.5
B
1009-9492(2014)02-0037-03
10.3969/j.issn.1009-9492.2014.02.011
丁旭升,男,1980年生,广东潮州人,大学本科。研究领域:机电液一体化、自动化探伤和无损检测产品的开发、设计和研究。已发表论文3篇。
(编辑:向 飞)
2013-08-08
