基于HOG的自动售货机人流量检测系统
2014-02-10陈耀欢任德均陈生雄
陈耀欢,任德均,陈生雄
(四川大学,四川成都 610065)
基于HOG的自动售货机人流量检测系统
陈耀欢,任德均,陈生雄
(四川大学,四川成都 610065)
为了能够检测自动售货机周围的行人数量,提出一种适用于自动售货机的人流量检测系统。该系统首先采用高斯混合模型的运动前景检测方法得到运动物体,并通过形态学处理进一步降低前景的噪声,然后提取运动物体的HOG特征并通过线性SVM分类器判断该物体是否为行人。在从现场采集到的视频上进行实验,结果表明该系统能够适应自动售货机前方的特殊环境,并能满足实时性的要求。
自动售货机;人流量;混合高斯模型;HOG;SVM
0 前言
随着生活节奏的加快,自动售货机应运而生,但是有很多地方的自动售货机形同虚设。为了避免这种情况的发生,有必要统计安装位置的人流量,以便于分析该处是否有必要安装自动售货机以及供货频率。但是至今还没有用于该领域的人流量检测系统,而且由于应用的特殊性,已有的行人检测系统无法移植到自动售货机上面[1-2]。
首先,摄像头要安装于自动售货机上,但是售货机高度有限,所以不能自上而下的监视行人,无法用现有的通过数人头的方法来统计人流量。
其次,自动售货机摆放位置的限制,行人大都不能正面对着摄像头,所以不能通过检测人脸的方法来统计人流量。
结合这些应用特点,本文采用了一种单目固定摄像机实时监控系统用于人流量的检测。算法基本流程图如图1所示。

图1 基本算法流程图
1 运动前景检测
本文所述系统应用于人处于运动状态的场景,所以先对采集的图片进行前景检测,以提取运动物体,然后对运动的物体进行下一步的处理,这样可减少计算量,提高实时性。本文采用基于高斯混合模型的运动前景检测方法。
在一段时间内,某一个像素值的变化序列为(X1,X2,X3,…,Xn),根据这一序列,用n(1≤n≤K)个高斯分布来描述该像素点的像素值分布情况。建立如下的混合高斯模型,即这段时间内,像素值Xt属于背景的概率:

式(1)中各参数值的含义如下:
K:高斯分布的个数,通常情况下K值越大处理效果会越好,一般取3~5;
wi,t:第i个高斯分布在t时刻的权重;
μi,t:第i个高斯分布在t时刻的均值;
Σi,t:第i个高斯分布在t时刻的协方差矩阵;
η:是如下的概率密度函数:
对于某个像素的几个混合高斯模型,按照wi,t的值,从大到小进行排序,wi,t值越大证明此像素值出现的频率高,可判定为背景。因此将前面B个模型视为背景,其他模型视为前景。其中T为阈值。

基本模型建立好之后,就要对相应的参数进行实时的更新,本文采用如下方法对模型中的各个参数进行更新:
(1)为了提高运算速度,假设每张图片中各个像素的RGB值之间相互独立并且具有相同的方差,如式(4)所示:
(2)由于应用场合为户外环境,光照会随着时间的推移慢慢变化,所以背景是动态变化的,故采用下面的方法动态更新模型中的参数wi,t、μt、:

式(5)-(8)中,
α:学习率,一般被固定为一个较小的值,从而减少背景噪声;
更新过程中,首先对wi,t进行更新,如果,则代表该像素值与第i个高斯分布相匹配,此时该高斯分布的 ρ=1,其他高斯分布的 ρ=0,同时更新第i个高斯的分布的均值和方差,其余高斯分布的参数保持不变。
至此高斯混合模型已经建立完成,并定义了更新方法,接下来就是对新来像素的判断,将新来像素点的值与B个高斯中的每一个均值进行比较,如果其差值在2倍的方差之间的话,则认为是背景,否则认为是前景。并且只要其中有一个高斯分量满足该条件就认为是前景。前景赋值为255,背景赋值为0。这样就形成了一副前景二值图。
2 降噪
通过高斯混合模型得到的前景二值图中含有很多噪声,所以采用形态学的开操作将噪声缩减到0,然后用闭操作重建由于开操作丢失的边缘部分的信息,从而消除不连通的小噪声点。最后就得到运动前景。
3 行人检测方法
Histograms of Oriented Gradients,顾名思义,方向梯度直方图,是目标的一种描述的方式,即是描述子[3-14]。
利用HOG+SVM检测行人,最终的检测方法是利用最基本的线性判别函数,wx+b=0。检测分为训练过程和检测过程,训练过程主要是提取一系列训练样本的hog特征,得到svm的系数。
3.1 获取HOG特征
HOG是将一个特征窗口win划分为很多的块block,在每一个块里又划分为很多的细胞单元cell(即胞元),hog特征向量即是把这些所有的cell对应的小特征串起来得到一个高维的特征向量。
本文获取HOG特征的其具体过程如下。
(1)计算图片中每个像素点的梯度幅度和方向。
(2)将检测窗口大小设为128×64,并均匀地划分为相邻的cell,cell大小为8×8。
(3)将梯度方向分为9个区间,即梯度方向将0°~360°分为9个方向块,每个方向块大小为20°,以各像素点的梯度幅度为权重,对各cell统计其梯度方向直方图,得到cell的HOG特征。然后每相邻的两个cell组成一个block,相邻block间有一半的区域是重叠的,即block在检测窗口中上下移动尺寸为8×8。
(4)在block内采用下式进行归一化处理,以消除光照的影响,得到block的HOG特征。

其中,Vi为原向量;为归一化后的向量;ε为常数。
(5)将窗口内所有block的HOG特征串联起来,构成最后的HOG特征。
所以一个检测窗口共有105=((128-16)/8+1)* ((64-16)/8+1)个block;一个block中有4个cell,而一个cell的hog描述子向量的长度为9;所以本文中检测窗口的hog向量长度=3780=105*4*9维。
3.2 获取SVM参数
本文检测方法是利用最基本的线性判别函数,wx+b=0。
通过样本所求的3780维向量是w,而加了一维的b就形成了3781维检测算子,然后用svm训练得到本文检测的w以及b。
3.3 检测过程
在检测期间,先用上文所述的获取HOG特征的方法,提取待检测目标的HOG特征x,得到此特征之后带入方程wx+b=0,就能进行判别目标是否为行人,并输出行人数量。
4 结论
本文对自动售货机安装现场采集到的视频进行分析处理,摄像头为30万像素。

图2 原始视频帧

图3 经过高斯混合模型提取前景

图4 经过形态学处理后的前景二值图

图5 当前帧检测结果
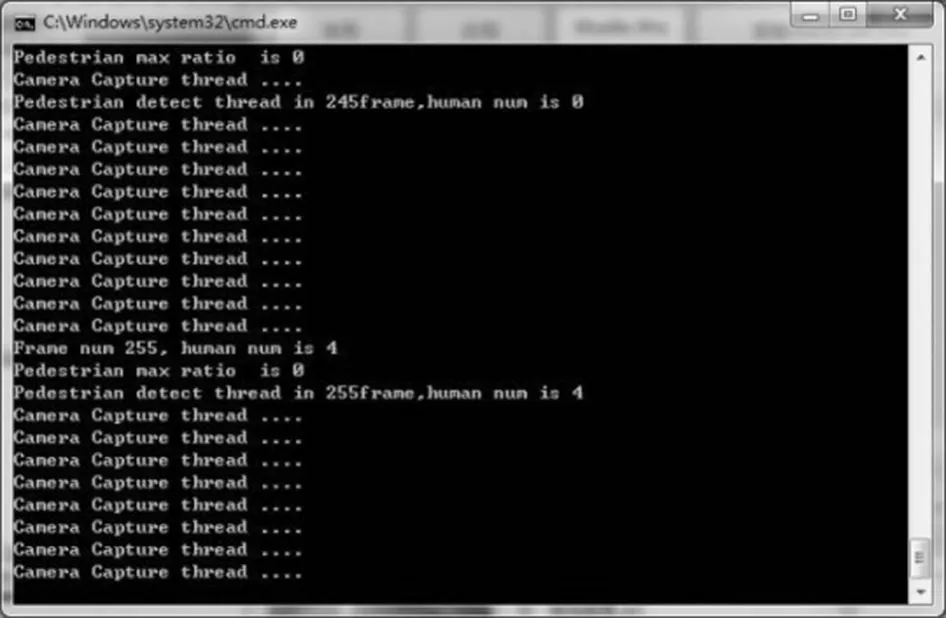
图6 显示行人数量界面,当前行人数目为4
由以上结果可见,在背景较为复杂,应用环境较为特殊的情况下,很好的实现了行人检测的功能,处理速度足以满足自动售货机实时监控的实时性。
5 结束语
本文提出的是一种应用于智能售货机统计人流量的行人检测方法。针对特殊的应用环境,首先利用基于高斯混合模型的运动前景检测方法提取运动物体,然后对前景图进行形态学处理,消除部分噪声,接着提取运动物体的HOG特征并判断是否为行人。该方法在检测行人之前,先提取运动前景,从而减少了需计算HOG的窗口,在检测准确率基本不变的情况下,明显提高了检测速度,从而满足了实时性的要求。下一步工作将考虑如何实现行人的跟踪,即在同一个人从开始出现到最后消失记为人流量数目为1,从而提高检测的精确性,同时继续研究解决遮挡问题的方法。
[1]Jianming Hu.Locating head and face boundaries for head shoulder images[J].1 pattern Recognition,1999,32(8):1317-1333.
[2]郑翔翔.基于头部检测和跟踪的人数统计方法[J].计算机应用与软件,2011,28(2):43-46.
[3]Rigoll G,Eickeler S,Muller S.Person tracking in real world scenarios using statistical met hods[J].Greno⁃ble:IEEE,2000:342.
[4]A.Samal.P.A.Iyengar.Automatic Recognition and Anal⁃ysis of Human Faces and Facial Expressions:A Survey. Pattern Recognition[J].1992,25(1):65-77.
[5]马义德,朱望飞,安世霞.改进的基于高斯混合模型的运动目标检测方法[J].计算机应用,2007,27(10):2544-2546.
[6]Dalai N,Tfiggs B.Histograms of Oriented Gradients for Human Detection[A].//Proceedings of IEEE Computer Society Conference on Computer Vision and Pattern Rec⁃ognition[C].[S.1.]:IEEE Press,2005:886-893.
[7]Bertozzi M,Brogi A,Caraffi C,et a1.Pedestrian Detec⁃tion By Means of Far-infrared Stereo Vision[J].Com⁃puter Vision and Image Understanding,2007,i06(2/3):194-204.
[8]汪中.面向变化场景的行人分类检测方法研究[D].合肥:中国科学技术大学,2011.
[9]杨英,刘卫国,王有财.基于二进制粒子群优化算法的行人检测[J].机电工程,2013(9):1142-1146.
[10]Liu Xuying.Exploratory Under-sampling for Class-im⁃balance Learning[J].IEEE Transactions on Sys⁃tems,Man and Cybernetice,Part B:Cybernetics,2009,39(2):539-550.
[11]Gavrila D M.Pedestrian Detection from a Moving Vehicle[A].//Proc.of European Conference on Computer Vi⁃sion[C].[S.l.]:ACM Press,2000.
[12]Viola P,Jones M,Snow D.Detecting Pedestrians Us⁃ing Pattern of Motion and Appearance[A].//Proc.of IEEE International Conference on Computer Vision[C].Nice,France: [s.n.],2003:734-741.
[13]曾春,李晓华,周激流.基于感兴趣区梯度方向直方图的行人检测[J].计算机工程,2009,35(24):182-184.
[14]郑江滨,张艳宁,冯大淦,等.视频监视中运动目标的检测与跟踪算法[J].系统工程与电子技术,2002,24(10):34-37.
Vending Machine Pedestrian Flow Calculation System on HOG
CHEN Yao-huan,REN De-jun,CHEN Sheng-xiong
(Sichuan University,Chengdu 610065,China)
In order to detect the number of pedestrians around the vending machine,puts forward a kind of traffic detection system applicable to the vending machine.Firstly this system gets the moving objects by using the mixture gaussian model and reduces the nosie of the foreground through the morphology processing.Then gain the HOG feature of the moving object through the linear SVM classifier to judge whether the moving object is pedestrians.Finally the results show that the system can adapt to the special environment in front of the vending machine,and can satisfy the requirement of real-time after testing on the video captured from the vending machine.
vending machine;pedestrains number;gaussian model;HOG;SVM
TP391.41
A
1009-9492(2014)07-0098-04
10.3969/j.issn.1009-9492.2014.07.029
陈耀欢,男,1989年生,河南濮阳人,硕士。研究领域:数字图像处理,生产过程中的动态监测。
(编辑:向 飞)
2014-01-14
