基于超声波无线传感器网络的移动物体计数系统
2014-02-10肖倩,敖欣
肖 倩, 敖 欣
(东莞理工学院 计算机学院,广东 东莞 523808)
0 引 言
随着国家经济的高速发展,越来越多的国计民生场合需要定量地统计各类数据,如会展场馆统计各类展台的访问频度[1],城市道路交通系统中统计各区域的交通流量分布[2]等。移动物体计数系统正是应这个需求而逐渐成为当前一个研究热点。然而,现有计数系统普遍采用基于视频检测[2]、红外感应[3]、压感[4]、热感[4]或者是磁感[5]等传统检测技术,因此不可避免地存在着检测精度低、受环境(光线、温度、磁场等)影响严重等问题。此外,在需求若干分系统的大型监测环境下,现有计数系统多采用有线连接来搭建各分系统间的数据传递通道,导致成本居高、灵活性欠缺等缺陷。
针对以上不足,本文从两个方面对现有系统进行改进。①考虑到超声波检测技术的定位便捷、准确度高的固有特点[6],利用超声波检测[7]替换传统检测手段,以有效解决当前检测手段存在的检测精度低、对环境敏感[8]等问题。为了进一步提高检测精度,还探索了如何联合多个超声波检测节点来协同解决计数系统中存在的移动速度不规则、重复计数等问题。②在上述超声波检测技术的基础上,着重研究了如何利用无线传感器网络技术来快速构建分系统间的数据传递通道,从而在保障系统既有服务目标性能的前提下最小化系统部署成本。最后,还研究了计数系统的数据存储、访问及安全管理等问题,以辅助系统用户方便地挖掘系统数据实现进一步的统计分析。
1 系统设计
1.1 系统框架
系统的基本框架如图1所示。系统主要包括:① 负责具体区域计数任务的分系统;② 负责互连各分系统的无线传感器网络;③ 负责连接外网的交换机、数据库服务器及访问终端。其中,右上方虚线框中所示的即是一个利用多个超声波传感器进行计数的基本计数系统。当有计数目标进入分系统的监测范围时,多个超声波传感器同时启动对该目标的跟踪,并通过相互协作来确定该物体(及其运动方向);下方所示的虚线框中,各分系统利用具有无线通信能力的接收节点,动态地自组织形成互连互通的无线传感器网络。任何一个分系统仅与其通信范围内的分系统进行通信,数据直接或者经由其他分系统传递至网关节点(左上方虚线框),并最终上传至数据库服务器。系统用户也可以借由各类终端,途径网关来访问数据库服务器中的数据,以便做进一步的统计分析。

图1 系统基本框架
由图1可以看出,移动计数系统主要包含以下三项核心功能:
(1) 超声波传感器计数功能。利用超声波传感器进行计数,是本系统的核心功能。如何准确探测到移动物体并进行计数统计,是实现系统正常工作的基础。因此,如何设计有效的综合计数算法来确保传感器节点探测物体的准确性、合理性是完成计数功能的关键。
(2) 超声波无线网络数据传输功能。超声波传感节点采集到数据后,将通过无线自组织网络进行数据的传输。采用无线自组织网络具有部署灵活、可适应性强、不需要复杂布线等优势。然而,由于无线信道的稀缺性,超声波传感器节点组成的自组织网络在数据传输中,不可避免地会面临传输冲突等问题。因此,如何设计无线传输协议(算法)来确保数据准确、及时地上传、下达也是本系统的核心问题之一。
(3) 数据管理功能。移动计数系统最终目的在于利用获得的统计信息进行后续的数据分享、分析及其他进一步的操作。因此,如何有效地管理获得的数据,以确保数据存储、传输和分析过程的便捷性、有效性、安全性及兼容性等也是系统需要关注的重点问题。
1.2 超声波传感器计数功能
超声波是指频率高于15 kHz的声波,其在空气中(20 °C)的传播速度大致为340 m/s,具有方向性好(衍射少)、能量耗散慢及传播速度慢等特点。在常规定时精度下,超声波测距(利用信号发射与接收的时间差换算)可提供厘米级的定位精度[9-10],因此常被应用在一些精度要求高的测距场合。与传统超声测距应用不一样,本系统对计数目标与超声波探测器之间的绝对距离并不感兴趣,而仅想利用计数目标介入探测器监控区域后对监控区域的空间分布产生的变化来间接感知计数目标的存在、数量及各自的运动方向等信息。遗憾的是,超声波传感器仅通过超声波探测来感知计数目标的存在,却无法直接区分识别不同的计数目标,也不能统计它们的数量及运动方向。因此,这一目标的实现存在着比较大的挑战。
针对上述挑战,本系统巧妙地利用多传感器协作构建共同监测区域,并通过不同计数目标进入、通过该监测区域时引发的一系列事件来推测计数目标的具体行为,从而实现了识别计数目标数量及运动方向等功能。该系统计数功能的实现依赖于特别的系统硬件部署及相应的软件计数算法。
1.2.1系统硬件部署
如图2所示,系统监测区域为一条规则的条形通道,计数目标需要通过该通道进入或者离开目标区域。通道两端分别部署一个超声波传感器(分别记为A、B传感器)。两传感器经由同一个控制器互联,以实现实时信息共享。当计数目标进入目标区域时需依次经过A、B传感器(如图中地面箭头所示);相反,离开目标区域时,计数目标则将如反方向依次通过B 、A传感器。传感器采用顶式部署,距离地面的距离固定为H。两个传感器的直线距离为D。每个传感器具有两路通道,即每个传感器可以用两个不同发射频率分别为f1、f2的超声波(f1,f2均大于15 kHz)。其中, 位于f1频段的发射探头垂直向下,负责监测本传感器下方区域的计数目标(绿色信号);而位于f2频段的发射探头则瞄准合作传感器正下方地板,负责监测合作传感器正下方区域(红色信号)。两个频段的接收探头均与相对应的发射探头并列布置,并调整至与发射探头同一方向,以便接收。由于f1、f2两频段不重叠,且A、B传感器相隔较远,因此,可以确保几乎沿直线传播的超声波信号不会产生相互干扰。

图2 超声波传感器计数原理三维示意图


图3 超声波传感器探测事件序列示意
1.2.2超声波传感器计数原理
在讨论计数原理前,我们先从图2所示的计数通道三维模型来分析计数目标可能存在的几种行为。为了方便展示,作出图3所对应的2D模型。如图4所示,A、B传感器所处区域分别用一条直线,箭头表示计数目标的行动方向, 箭头上方数字表示计数目标行动顺序。根据箭头的方向及所经过的传感器,我们分别将它们命名为IN-A、OUT-A、IN-B、OUT-B事件。从图中可以看出,4(a)、4(b)分别对应正常情况下计数目标通过计数通道进入、离开目标区域两种行为;而4(c)、4(d) 则分别代表两种不正常的情况,即计数目标进入或者离开途中突然折返。计数系统的设计目标是统计正常进入、离开目标区域的人数。

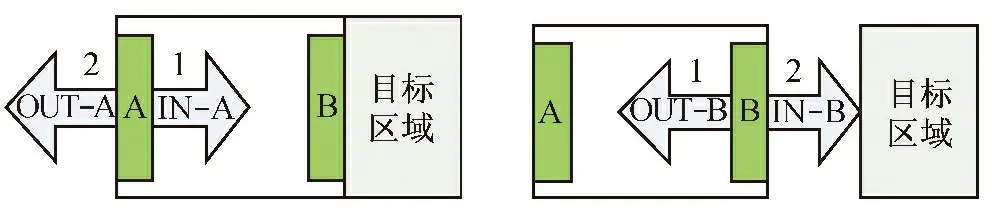
(a) 正常进入目标区域 (b) 正常离开目标区域
(c) 进入途中突然折返 (d) 离开途中突然折返
图4 计数目标进入或者离开目标区域的四种行为
要想达成此目标,必须要正确地区分、识别上述四种行为构成的四种基本事件:IN-A、IN-B、OUT-A、OUT-B。而这就依赖于利用传感器对这四种基本行为的事件响应来刻画它们各自的特征。我们先以图4(a)的流程为例来分析IN-A、IN-B事件的时间特征。如图2所示,当计数目标从灰色入口进入计数通道时,位于其头顶的A传感器将通过f1探头探测超声波的传播(反射)时间测算出其与计数目标头顶间的距离。同时,A传感器的f1频段探头还将记录反射信号被捕获并识别的时间戳,我们记为t1。紧随其后,B传感器的f2频段探头也将探测并捕获到位于A下方的计数目标反射回的信号。其具体的捕获时间戳可记为t1+T,其中T为与A、B传感器距离D及通道高度H有关的常量,即,
其中:C为超声波传播速度;d为计数目标平均高度。
当计数目标行至B传感器下方时,B传感器的f1发射探头发射的超声波信号将被计数目标反射回来,并在t2时刻被f1接收探头所识别并捕获。同样,紧随其后,A传感器的f2探头也将在T时间后探测并捕获到该反射信号。随即,计数目标继续离开B传感器的范围,进入目标区域。为了便于直观理解,将上述过程在时间轴上展示于图5(a)。其中,f1探头所探测的事件用绿色表示,f2探测的事件则用红线表示。四条轴线分别对应A、B传感器的四个探头记录的时间序列,轴线上的黑色箭头则代表它们所探测到的事件(的发生时间)。
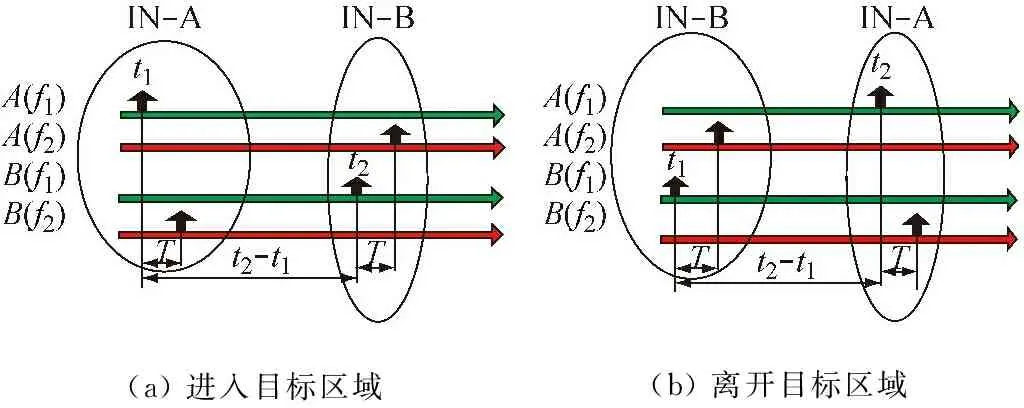
(a)进入目标区域(b)离开目标区域
图5 计数目标通过计数通道进入目标区域时引发的事件
同样原理,当计数目标通过计数通道离开目标区域,即依次经过B、A传感器时,依次会发生OUT-B、OUT-A事件。对比图6(a)、图6(b)可知,事件IN-A与OUT-A,以及事件IN-B与OUT-B之间的在轴线上的时间特征都相同。因此,按目前的设置还无法完全区分IN-A与OUT-A,以及OUT-B与IN-B事件。为此,先以IN-A、OUT-A事件来分析。

(a)进入目标区域(b)离开目标区域
图6 计数目标进入、离开目标区域时引发的事件
当t1时刻A传感器f1探头发现计数目标经过其进入计数通道时,t1+T时刻B传感器的f2探头将感知到该事件。由图2可知,由于计数目标存在一定高度,因此,在接下来的一小段时间(M)内,计数目标将阻断B传感器f2探头的超声波。即B传感器f2探头在首次探测后的M时间内,仍然会持续感知到其的存在;与此相反,如果计数目标是经过A传感器离开计数通道时,则其将很快离开计数通道,从而也不可能阻断B传感器f2探头的超声波。因此,IN-A事件中, B传感器f2探头在t1+T时刻后将持续探测到计时目标的存在(如图6中白箭头所示);而OUT-A事件中,则不会出现这些事件(如图6所示)。这就非常直观地区分开了在A传感器处发生的IN-A与OUT-A事件。同样的道理,我们可以区分开IN-B与OUT-B事件。
1.2.3超声波传感器计数算法
由上述讨论可知,通过A、B传感器的协同,系统可以得到4个探头所探测到的一系列时间,进而组合后推测出对应的IN-A、IN-B、OUT-B、OUT-A这四种基本事件。当单个计数目标如图4(a)、4(b)一样,正常地通过计数通道进入或者离开目标区域时,上述四种事件将严格按照顺序发生。然而,当多个计数目标同时进入或者离开目标区域时(这几乎是常态),该四种事件的发生顺序就会被打乱。假设有两个计数目标几乎同时(或者相隔不久)经过计数通道分别进入、离开目标区域时,则这四种事件的出现顺序可能有以下几种情况:① IN-A、OUT-B、OUT-A、IN-B;② IN-A、IN-B、OUT-B、OUT-A;③ IN-A、OUT-B、IN-B、OUT-A;④ OUT-B、OUT-A、IN-A、IN-B;⑤ OUT-B、IN-A、IN-B、OUT-A;⑥ OUT-B、IN-A、OUT-A、IN-B。计数算法就是要从这些序列化的事件中合理推测出计数目标的行为,进而得到相应的统计数据。而这种推测依赖于图4所示的各类行为所包含的事件及其顺序。在忽略异常情况的前提下,一种最为简单的统计算法即是强行匹配,即IN-A与IN-B顺序匹配,而OUT-B与OUT-A顺序匹配。
1.3 无线网络传输功能
双传感器采集到所监测区域的计数信息后,还需要将其上传至终端服务器进行数据存储、分析等后续工作。传统的计数系统往往利用有线连接来互连各个分系统,但这样的方式存在灵活性差、部署成本高等缺点。针对这一缺点,本计数系统运用ZigBee技术来搭建点对点的对等式无线自组网络,从而利用无线多跳传输技术将各个分系统有机地互联。与其它无线传输技术不同,ZigBee技术具有成本低、功耗低、组网容量高、方式灵活等显著特点[11-12]。虽然其传输速度仅有几百kb/s,但能够满足低传输速率需求的移动计数系统的任务需要。如图7所示,ZigBee协议是以IEEE 802.15.4标准[13]为基础建立,它定义了协议栈最底的两层:物理层(PHY)和媒体接入控制子层(MAC)。其中,物理层既可以工作在传统的2.4 GHz频段,也可以工作在868/915 MHz频段;ZigBee联盟则负责提供网络层和应用层结构(各类应用接口),而用户可以在此基础上定制具体传输任务,从而灵活地实现系统的任务需求。

图7 ZigBee协议栈结构
ZigBee协议支持三种组网模式:星形组网、树形组网和网状组网。如图1所示,本计数系统采用网状式拓扑结构,所有分系统利用无线通信节点对等地构建自主通信网络。对于有些无分系统部署的区域,系统还额外部署一些中继通信节点,以确保网络的连通性。由于移动计数系统所监测的区域及分系统的部署一旦确定,基本上是不会变动位置。因此,各个分系统通信节点间的连接链路相对比较稳定。针对这一特点,系统采用准动态路由协议AODV[14],其兼顾了传统的表驱动路由与新型的按需路由的特点,具有协议效率高、路由建立时间短、更新维护开销小等特点。与传统的DSDV表驱动路由不同,AODV只为有传输需求的节点按需建立路由;那些不在活跃路径上的节点不会维持任何相关路由信息,也不会参与任何周期路由表的交换。而与典型的按需源路由DSR不同,AODV中不需要将路由包含在每一个数据分组中,从而有效降低了协议开销;它允许中间节点回复已知的最新路由信息,从而降低找路开销。
1.4 数据管理功能
数据管理功能指由终端服务器进行数据的存储、分析等。这就客观要求各分系统上传数据格式的统一,以便于在压缩数据传输量的同时提高系统的处理效率。为此,考虑到移动计数系统自身的数据处理特点,先提出几类通用的数据结构来辅助记录。
首先,对于单个由双传感器组成的分系统,它需要涉及记录不同传感器所探测到的计数目标进入或者离开事件,并由此推测出计数目标的具体行为。因此,为了便于存储这些中间或者最终数据,定义以下一些数据结构:
(1) 元事件数据结构。记录具体某个时刻某个传感器侦探到计数目标阻断其传输的事件,具体结构如图8所示。其中,设备类型用1位0、1数值来标示A、B传感器,设备代码是指传感器唯一的标识符,探头类型用1位0、1数值来区别f1、f2探头,元事件时间是指传感器探测被计数目标阻断 (当反射距离小于预设距离时激发) 的具体时间。每对A、B传感器在侦测到元事件后,立即将数据传送到管理控制器进行临时存储;而后,控制器根据这些传感器的不同探头所采集到的事件分析推理出具体的IN-A、IN-B、OUT-B、OUT-A等事件。这些事件被统称为目标事件,并用以下结构存储。

图8 元事件数据结构
(2) 目标事件数据结构。记录计数目标进入或者离开计数通道的具体事件,结构如图9所示。其中,设备代码是指传感器唯一的标识符,目标事件类型用两位二进制代码来区分IN-A、IN-B、OUT-B、OUT-A四种事件。目标事件时间基于元事件时间得到,它是指当连续多个元事件发生时,首次元事件的发生时间。

图9 目标事件数据结构
(3) 目标行为数据结构。是基于记录的连续目标事件,根据计数算法所推导出来的计数目标具体行为,结构如图10所示。其中,区域代码是指双传感器所负责的区域代码,目标行为类型用两位二进制代码来区分如图5所示的四种行为,即:正常进入目标区域、正常离开目标区域、进入中途折返、离开中途折返,而目标行为时间是用来区分不同时间段的相同目标行为。

图10 目标行为数据结构
与上述两种数据不同,目标行为数据结构是由分系统的控制器负责运行计数算法不断产生,并立即通过无线传输网络上传至终端数据服务器。终端分析程序能够基于这些动态更新的数据,实时地分析整个监测区域内的访问频度、密度等整体情况,并作出相应决策。当然,目标行为数据也可以由各分系统的本地控制器实时统计,并在本地的显示设备上实时更新。
2 系统测试与分析
基于上文对系统模型及设计原理的阐述,我们实现了一个基于无线传感器网络的超声波移动计数系统原型。如图11所示,系统的核心功能套件由上层具备超声波探测能力的芯片及下层负责进行无线通信的传感器节点构成。该套件选用TinyOS[15]作为Mica2的操作系统,并使用NesC语言进行编程开发,从而构成单独的一个超声波传感节点。在某个特定的待监测区域,若干个超声波传感节点构成一个区域性监测网络,并负责对该区域(如某个入口)的计数对象进行统计。当有若干个监测区域时,每个监测区域内由若干个超声波检测节点构成的分系统则利用无线传感器网络技术构建一个互通的数据通道。

图11 原型产品图
如上所述,针对超声波无线传感网络的计数统计系统,我们已经进行了产品的实验工作。根据今后的应用,对原型产品进行了模拟现实应用情况的实验,如商场入口、学校校门等场景。在基本性能实验的基础上,为获得原型产品的性能参数指标,我们又在模拟的实验环境当中,采用了对比实验的方法,将超声波无线传感网络计数统计系统原型与其它系统同时进行计数测试。经过多次重复实验,各种传感器的计数准确度如图12所示。超声波无线传感器原型产品在准确度上达到了98%,漏计、误计率较其他产品低。
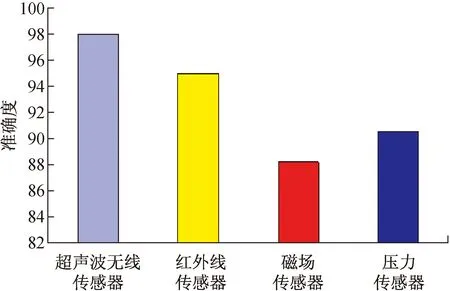
图12 各类型传感器的检测精度对比
3 结 语
无线传感网络具有能耗小、成本低、易部署等优点,被誉为21世纪最有前途的技术之一。而超声波检测技术具有检测迅速、抗干扰能力强及成本低等特点。结合这两者的优势,率先提出了一种融合超声波检测与无线传感器网络传输的新型移动计数系统。与基于视频检测、红外感应、压感、热感或者是磁感等传统计数系统不同,新型移动计数系统利用超声波检测的上述优点,成功解决了传统系统中存在的检测精度低、受环境(光线、温度、磁场等)影响严重等问题。此外,借助于无线传感器网络的特性,新型系统解决了采用有线连接的传统系统存在的部署成本高、灵活性低、可拓展性不强等不足。在展会经济、公路交通等计数目标密集型产业迅猛发展的推动下,大型分布式移动计数系统将越来越受到广泛的应用。而本文提出的新型的基于超声波无线传感器网络的移动计数系统能够很好地承接这一成长性需求,从而有望在占领一定的市场空间的同时,创造不小的社会、经济效益。
[1] 杨媛媛, 刘瑞霞, 赵 雪.基于无线传感器网络的展馆定位与管理系统的设计与实现[J].山东科学,2011,24(3): 59-63.
YANG Yuan-yuan, LIU Rui-xia, ZHAO Xue. Design and Implementation of Exhibition Location and Management System Based on Wireless Sensor Networks[J]. Shandong Science, 2011, 24(3):59-63.
[2] 罗 欣, 朱清新. 改进的基于边缘检测技术的车流量统计系统[J].计算机工程,2006, 32(9): 228-229.
LUO Xin, ZHU Qing-xin. Improved Car Traffic Monitoring System Based on Edge Detection[J]. Computer Engineering, 2006, 32(9):228-229.
[3] 钟 鼎, 尹媛媛. 基于STM32人流量统计监控系统设计[J].电子设计工程,2011,19(20): 94-96.
ZHONG Ding, YI Yuan-yuan. Real Time People Flow measure statistical system based on STM32 [J].Electronic Design Engineering, 2011, 19(20):94-96.
[4] 余军涛, 张 跃. 运动车辆自动识别分类研究[J].交通与计算机,2000,18(6):29-31.
YU Jun-tao, ZHANG Yue. Research on Automatic Classification of Mobile Vehicles[J]. Traffic and Computer, 2000,18(6):29-31.
[5] 王明哲, 吴 皓, 周 丰.基于地磁的车型识别模糊数据融合方法研究[J].公路交通科技,2008, 25(1): 155-158.
WANG Ming-zhe, WU Hao, ZHOU Feng. Research of Fuzzy Data Fusion Based on Geomagnetism for Vehicle Type Identification Process [J]. Journal of Highway and Transportation Research and Development, 2008, 25(1):155-158.
[6] 李昌禄,苏寒松.超声波定位系统的研究[J].实验室研究与探索,2013,32(2):39-44.
LI Chang-lu, SU Hang-song. An Ultrasonic Positioning System [J]. Research and Exploration in Laboratory,2013,32(2):39-44.
[7] 周立青,常家超,何 炜,等.基于超声计数的智能交通灯控制系统[J].实验室研究与探索,2011,30(9):63-66.
ZHOU Li-qing, CHANG Jia-chao, HE Wei,etal. Intelligent Traffic Light Control System Based on Ultrasonic Counting [J]. Research and Exploration in Laboratory,2011,30(9):63-66.
[8] 余 农,吴常泳,汤心溢,等.红外目标检测的自适应背景感知算法[J].电子学报,2005,33(2):200-204.
YU Nong, WU Chang-Yong, TANG Xin-yi,etal. Adaptive Background Perception Algorithm for Infrared Target Detection [J]. Acta Electronica Sinica, 2005,33(2):200-204.
[9] 苏 凯,任 军,王 斌,等.基于超声波测距的实时路况信息采集系统[J].实验室研究与探索,2011,30(8):70-73
SU Kai, REN Jun, WANG Bin,etal. Design of Real-Time Traffic Information Collection System Based on Ultrasonic Measuring[J]. Research and Exploration in Laboratory, 2011,30(8):70-73.
[10] 王郑静, 张 劼, 华泽钊, 等. 室内超声波定位系统的构建与测试[J]. 上海理工大学学报, 2007, 29(6):553-556.
Wang Zheng-jing, Zhang Jie, Hua Zhe-zhao,etal. Design and test of indoor ultrasonic positioning system [J]. Journal of University of Shanghai for Science and Technology, 2007, 29(6):553-556.
[11] 张 平, 康桂霞, 田 辉. 甚低功耗无线通信技术——ZigBee. 中兴通讯技术[J].2006, 12 (4): 21-25.
Zhang Ping, Kang Gui-xia, Tian Hui. ZigBee——Very Low-Power Wireless Communication Technology[J]. Zte Communications, 2006, 12(4):21-25.
[12] 汤文亮,曾祥元,曹义亲,等.基于ZigBee无线传感器网络的森林火灾监测系统[J].实验室研究与探索,2010,29(6):49-53.
TANG Wen-liang, ZENG Xiang-yuan, CAO Yi-qin,etal. Forest Fire Detection System Nased on ZigBee Wireless Sensor Network[J]. Research and Exploration in Laboratory,2010,29(6):49-53.
[13] IEEE Standard for Information Technology-Telecommunications and Information Exchange Between Systems-Local and Metropolitan Area Networks Specific Requirements Part 15.4: Wireless Medium Access Control (MAC) and Physical Layer (PHY) Specifications for Low-Rate Wireless Personal Area Networks (LR-WPANs) [S]. IEEE Std 802.15.4-2003 , vol., no., pp.0_1,670, 2003.
[14] Perkins, Charles, E. Belding-Royer, and Samir Das. RFC 3561-ad hoc on-demand distance vector (AODV) routing[S].Internet RFCs, 2003: 1-38.
[15] Levis, Philip. TinyOS: An operating system for sensor networks [M]. Ambient intelligence. Springer Berlin Heidelberg, 2005:115-148.
