激光目标运动模拟器的校准技术
2014-02-10吴平
吴 平
(上海无线电设备研究所,上海 200090)
0 引 言
激光雷达具有分辨率高、测量精度高、抗干扰能力强、机动性好等诸多优点,但最突出的优点是它能够直接提取激光目标的三维几何信息和激光回波信号的强度信息,并生成强度像和距离像,利用强度信息和距离信息构成了目标完整的三维位姿信息[1]。近年来,激光雷达技术研究的不断深入,计算机仿真技术在激光雷达、空间目标探测、制导武器领域等技术研究和工程应用,已经成为各国军事界和科研人员的重视和关注的焦点。由于激光雷达技术的研究投入巨大,通常在研制激光雷达实物之前需先进行仿真实验和论证研究,预测将要研制的激光雷达系统的各项性能指标,评价总体方案的可行性。利用现代计算机仿真技术来逼真地复现雷达回波信号的动态过程是计算机技术、数字模拟技术和激光雷达技术相结合的产物。模拟的对象是激光雷达的目标和环境,模拟的手段是利用计算机及相关的设备,模拟的方式是“复现”蕴含雷达目标及目标环境信息的激光雷达信号。实验室激光目标运动模拟器是激光雷达目标探索技术研究中具有必不可少的综合测试设备,它能在室内有限空间里模拟实际空间的激光运动目标的方位、俯仰和距离等三维几何信息的激光回波信号。在实际雷达系统前端不具备的条件下对激光雷达系统后级进行试验调试;验证激光探测系统设计的合理性和有效性;用作为激光雷达跟踪装置、激光目标探测系统等相关技术研究及产品的调试测量、测试验收和技术性能评估。通常激光雷达目标信号模拟器等这类综合测试设备系统的计量检定采用各分量参数分别测试,较难体现综合参数的实时性和完整性,使得对激光雷达目标信号模拟器的检定评估较为复杂[2-3]。基于计算机的激光雷达仿真系统逐渐完善,对激光雷达信号模拟器的技术性能指标、准确性和可靠性等的参数的考量有了更高要求。迫于这样的需求,对激光雷达信号模拟器综合参数的测试计量、校准检定的技术研究是必须的。
1 激光雷达目标运动模拟器
某激光实验室采用一种主动式激光雷达运动目标模拟器,由模拟激光雷达目标回波的合作光标、二维模拟目标运动平台和计算机仿真系统等组成,能够在室内有限空间模拟远处激光目标的光辐射回波,模拟目标的空间位置和方位、俯仰、距离三个方向上的角速度和角加速度的动目标特性[4-5],其位姿信息变化连续可调。图1为主动式激光雷达运动目标模拟系统框图。

图1 激光雷达运动目标模拟系统框图
目标模拟系统工作时根据仿真实验要求,由计算机仿真系统通过CAN总线实时的发出目标航路指令,激光脉冲发生器将目标距离信息(z)转换为目标距离相对应的延迟回波脉冲信号,控制激光源发射激光脉冲;运动伺服系统将目标位置信息(x,y)转换成控制信号驱动激光合作光标在目标运动平台内作二维运动和定位;从而模拟了激光运动目标的三维空间位姿的方位角(α)、高低角(β)、距离(γ)及其运动轨迹,如图2所示。

图2 目标运动轨迹
2 双通道非扫描校准系统
运动目标模拟装置模拟飞行目标,不仅逼真地反映真实目标的空间位置,还体现目标的运动姿态。如上所述,激光目标运动模拟器由激光合作光标、二维模拟目标运动平台和计算机仿真系统等组成,各组成部分都经过了严格的测试,但是组合起来后的总体性能仍然难以用各分部件的测试结果准确地得出,因此对激光目标模拟器进行整体性能的测量、校准成为必要。图3为双通道非扫描测量校准系统图,由光学系统、APD探测、CCD成像、位姿解析等组成[6-7]。

图3 双通道非扫描测量校准系统图
2.1 光学系统
光学部分起到光信号的处理和传递作用,由光学透镜、分光棱镜、CCD、APD等器件组成。激光目标模拟器出射光束,经光学变焦透镜进行聚焦,在平行光管处靠近焦平面处放置一个分光镜,将光学图像分成主、次两通道,形成双通道光学探测系统,如图4所示。主通道上在平行光管处焦平面上安置一个CCD探测器,由CCD探测出各像素点对应的响应不同位置的入射光信息,再经数据采集卡和数据处理后送到计算机上进行精准定位[8-10];次通道上在分光镜后放置一个APD探测器,由APD探测器测得光功率谱中含有目标距离的信息,经数据采集进入接收信号处理电路中,利用飞行时间法计算出目标的绝对距离值,实现目标的一维距离信息的非扫描测量[11]。

图4 光学系统示意图
2.2 APD测距
对于非扫描激光雷达的APD测距,在模拟目标运动范围内的光脉冲辐射位置对应于整个APD探测器的接收视场,每个位置上的激光脉冲光束在探测器上都可以接收到,从而得出距离信息。针对双通道探测模式的关键技术之一是基于APD雪崩光电二极管的非扫描激光探测系统,APD探测器对纳秒级脉冲激光束作为激光目标的回波进行探测,利用飞行时间法(Time of Flight,TOF)实现一维距离信息的非扫描测量。TOF飞行时间法实现距离测量,根据发射和接收光脉冲之间的时间差,计算出待测目标的实际距离,根据下式计算出被测目标的实际距离:
D=CΔT/2
(1)
式中:D表示所测距离;ΔT为时间差;C为光速。
被动式激光脉冲的测距系统原理框图如图5所示。当时基同步信号激励到达APD测距系统开始计时,激光目标模拟器根据仿真距离延时触发激光光束作为回波信号经光学透镜系统汇聚到APD上,APD将接收到的光信号转变成电信号,经过放大、整形以后进入高速数据采集、时间鉴别测量模块,通过测出回波信号与同步信号间的时间延迟并计及目标模拟器的固有时间延迟,得到激光回波束到达APD测距系统的、精确的时间延迟值,计算出模拟激光目标的绝对距离值,波形如图6所示[12]。

图5 APD测距系统框图

图6 目标时间延迟测量波形
激光测距系统的测量精确度主要依赖于激光脉冲的上升沿、接收通道的带宽、APD探测的信噪比和时间间隔测量精确度。从分析激光飞行时间T出发,精确稳定地控制计时的起止时刻和精确测量延时时间ΔT,它们各自具备对应的时刻鉴别单元和时间间隔测量单元。由于激光脉冲在空中传输过程中会产生衰减和畸变,进而导致接收到的激光脉冲与发射激光脉冲在形状和幅度上都有很大改变,这就会对起止时刻的精确测定带来困难。输入噪声引起的时间抖动也是影响测量精度的一个原因。所以正确设计时刻鉴别单元以达到消除、减小漂移误差和时间抖动等因素是激光脉冲测距技术的设计重心之一。
2.3 CCD位置检测
在模拟激光目标运动范围内,目标光束辐射的每个位置对应于CCD探测器的接收视场内位置上的像素位置。目标光束辐射源通过光学成像透镜系统对能量会聚、滤波并照射到探测器的光敏面上,示意图如图7所示。

图7 CCD方位角测量原理图
CCD的功能主要是通过测量目标的角位移来确定目标的方位角的。由图7原理图,根据几何光学原理,可以得到:
(2)
式中,α为被测目标相对于传感器的方位角;x为目标在传感器上的成像位置;x0为目标在方位角为0°时在传感器上的成像位置;a为成像距离。
同理可以得到:
(3)
式中:β为被测目标相对于传感器的高低角;y为目标在传感器上的成像位置;y0为目标在俯仰角为0°时在传感器上的成像位置。CCD位置检测的功能是对前置光学系统形成的光学图像进行采集,并以图像的形式存储在计算机中,确定面阵CCD像敏元和所采集的图像像素之间的对应关系,对于图像上指定的点就能在CCD面阵上能找到相应的像敏元[13-14]。 但是图像采样的像素点与探测器的光敏元没有确定的对应关系,因而必须设计出一种新的电路,它能产生一个带有标志线的图像信号,该标志线在CCD面阵上的像敏元位置已知,通过图像板对这个图像信号采样,得到一幅图像,针对此图像进行分析找到标志线所在的像素,这样将图像上标志线的位置与CCD上像敏元的位置相比,得到一个常量,通过这个常量我们就可以将图像上的像素点与CCD面阵上的像敏元一一对应起来。图8表示出了CCD面阵和图像像素的对应关系。

图8 CCD面阵与图像像素的对应关系
水平比例常数:
垂直比例常数:
不难知道水平常数constH和垂直常数constV的值是与CCD的分辨力、读出时钟和图像采集板的设置有关的。在相同条件下,只要得到这2个常数,就可以确定任何一幅图像与CCD面阵像敏元的映射关系,即可确定被测目标相应的位置。激光目标回波光束通过光学系统后并对其进行准直、整形后形成一个圆形光束,此光束成像到CCD有效光敏面上,通过信号调理和数据处理得到实时的光斑位置变化信息[15]。光斑位置测量时,先将CCD检测系统调整到设定的工作距离上(此距离由光学镜头参数和测量精度决定),并调整测试台支架使合作目标光点成像到CCD光敏面的中心位置,当激光目标位置发生移动后,CCD感应的像点发生变化。此变化反映了被测激光目标的位移量,在此基础上通过已产生的测量标志线脉冲,精确测定标志脉冲的位置,得到表征图像像素和CCD像敏元对应关系的水平和垂直比例常数constH、constV,最后经计算机系统数据处理可得到激光目标的实时位置坐标及其运动轨迹[16-17]。
2.4 位姿解析及计算机校准
目标位姿参数解析处理是利用位置测试数据、距离探测数据,完成目标方位角、俯仰角、距离和速度的计算。APD 和CCD两路测试数据以数字信号经总线传输至校准系统的内存中,计算机通过与存储器的接口读出存储器中的数据进行位姿解析综合处理。结合二组数据可以得出运动目标的运动信息,确定目标的实时位置。视角变动速度和距离运动速度通过目标的空间位置信息的微分处理得到。最后计算出方位角(α)、俯仰角(β)、距离(γ)和速度ν,获得激光雷达模拟目标运动的位姿参数,校准测试系统的软件主要流程如图9所示。计算机处理软件包含数据采集与处理程序,主要完成以下几方面的工作:数据采集、位姿解析、数据比对及存储。运动目标速度的计算激光雷达目标模拟器校准系统软件还需具有系统参数输入、测量数据位姿参数保存、输出校准结论、显示目标运动轨迹并打印校准测试报告等功能。
图10是激光运动目标模拟器校准系统无前端探测设备的半实物数值仿真的校准测量轨迹曲线。激光目标模拟器运动轨迹的控制信号作为校准系统的期望运动轨迹,数据采集系统获得激光模拟目标在空间虚拟的运动信息,经数据处理和位姿解析得到校准测量的运动轨迹。校准系统工作时,由激光运动目标模拟系统发出预设目标运动的航路指令,通过CAN总线传至系统作为实时目标位姿的测量校准基准,将系统处理计算的位姿参数与测量校准基准比对同一时刻的期望轨迹参数和实际测量轨迹参数,引入测量不确定度理论分析法,计算随机误差和系统误差等测量不确定度分量,分析其对系统校准测量的影响,从而对被校激光目标模拟器的参数性能的评估,正确评估被校准的激光目标模拟器准确度和可靠性,实时显示和输出模拟目标的三维数据及校准结论。

图9 校准测试系统软件流程
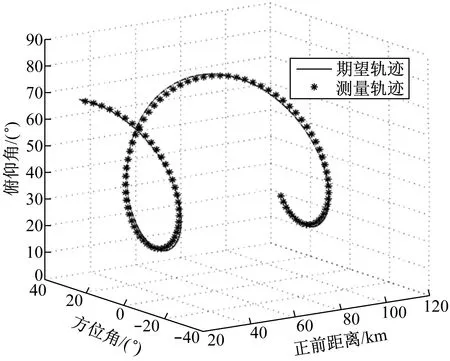
图10 校准测量轨迹
3 结 语
研究激光模拟目标空间位置变动和运动轨迹特征,将光学系统、CCD图像系统、APD测距及计算机位姿处理系统结合起来,开发测量校准软件,实现模拟激光目标位姿(即:方位、俯仰方向上的视线角变化和距离方向的变化)的测量和校准,获得激光雷达模拟目标运动的位姿参数,以考量被校激光雷达目标模拟系统的准确度和可靠性,实时显示和输出模拟目标的三维空间数据及校准结论。本校准技术方法的研究,在校准测量方法上有所创新突破,系统集成易于实现,可适用于多种类型的激光雷达目标模拟系统的计量校准,具有良好的实用性,能有效地进行相关量值的溯源,满足激光雷达目标模拟系统的校准需求。
[1] 陈海霞,赵猷肄,董军章.基于测角信息的机动目标轨迹预测研究[J]. 光电技术应用,2009,24(4):6-20.
CHEN Hai-xia, ZHAO You-yi, DONG Jun-zhang. Estimation of Mobile Target Track Based on Angular Information[J]. Electrooptic Technology Application, 2009,24(4): 6-20.
[2] 徐庆飞,张 新,李卫民.二维空间中目标轨迹预测算法研究与分析[J].航空电子技术,2012,43(1):10-14.
XU Qing-fei, ZHANG Xin, LI Wei-Min. Research and Analysis of Target Track Prediction Algorithm in 2-Dimensional Region[J]. Avionics Technology, 2012,43(1): 10-14.
[3] 晁志超,伏思华,姜广文,等. 单目摄像机一激光测距传感器位姿测量系统[J]. 光学学报,2011,31(3):1-7.
Chao Zhi-chao,Fu Si-hua,Jiang Guang-wen,etal. Mono Camera and Laser Range finding Sensor Position-Po Measurement System[J]. Acta Optica Sinica, 2011,31(3):1-7.
[4] 徐代升,何忠平,舒 嵘,等.激光制导目标方位探测系统的光学设计[J].光学与光电技术, 2004,2(5):1-4.
XU Dai-sheng,HE Zhi-ping,SHU Rong,etal. Optical Design of a Laser Seeker[J]. Optics & Optoelectronic Technology, 2004,2(5):1-4.
[5] 邹万军,朱国力,吴学兵.基于面阵CCD的激光角度测量系统的研究[J].光电工程,2006,33(10):91-95.
ZOU Wan-jun, ZHU Guo-li, WU Xue-bing. Angle measuring system of laser based on array CCD[J]. Opto-Electronic Engineering, 2006,33(10): 91-95.
[6] 刘秉琦,周 斌,武东生,等.双通道激光主动探测系统[J]. 光学精密工程, 2012,20(2):241-246.
LIU Bing-qi,ZHOU Bin,WU Dong-sheng,etal. Dual-channel active laser detection system[J]. Optics and Precision Engineering. 2012,20(2):241-246.
[7] 王汉兵,黄 涛,雷 磊,等.基于图象模式的CCD视频信息采集技术[J].中国测试,2011,37(6):68-79.
WANG Han-bing, HUANG Tao, LEI Lei,etal. CCD vidoo information acquisition technology based on image pattern[J]. China Measurement & Test, 2011,37(6): 68-79.
[8] 林家明.面阵CCD摄像机光学镜头参数及其相互关系[J].光学技术,2000,26(2):183-185.
LIN Jia-ming. Specification data of CCD camera lens and their relations[J].Optical Technique, 2000,26(2):183-185.
[9] 李志敏,石文江,李志高.面阵CCD电视摄像机直接像元采集新方法[J]. 压电与声光, 1996,18(4):276-285.
LI Zhi-min,SHI Wen-jiang,LI Zhi-gao. A New Method of Directly Colleting Pixels from CCDTV camera[J]. Piezoelectrics Acoustooptics, 1996,18(4):276-285.
[10] 祝铭一,崔 伟.基于面阵CCD的光学对中自动测量装置[J].长春工业大学学报(自然科学版),2010,31(1):19-22.
ZHU Ming-yi,CUI Wei. Optical centering automatic measurement based on area array CCD[J]. Journal of Changchun University of Technology (Natural Science Edition), 2010,31(1):19-22.
[11] 李 密,宋影松,虞 静,等. 高精度激光脉冲测距技术,测距技术[J].红外与激光工程,2011,40(8):1469-1473.
LI Mi,SONG Yingsong,YU Jling,etal. High precision laser pulse distance measuring technology[J]. Infrared and Laser Engineering,2011,40(8): 1469-1473.
[12] 朱 福,林一楠. 一种提高脉冲激光测距精度的方法[J]. 光电技术应用,2011,26(2):42-44.
ZHU Fu,LIN Yi-nan. Method to Improve Accuracy of Pulse Laser Ranging[J].Electro-Optiic Technology Application, 2011,26(2):42-44.
[13] 钟 翔,齐 龙.面阵CCD尺寸测量的实验[J].实验室科学,2009(1):120-122.
ZHONG Xiang, QI Long. CCD array size measurement experiment[J]. Laboratory Science,2009(1): 120-122.
[14] 董 斌,杨 韧,刘兴占,等.一种使用线阵型CCD实现高精度二维位置测量的方法[J]. 光学技术,1998(5):42-45.
DONG Bin, YANG Ren, LIU Xingzhan,etal.A method of measuring precisely two-dimension position with linear array CCD[J]. Optical Technology, 1998(5): 42-45.
[15] 蒋月娟,夏 亮.一种精密测量CCD上像点位置的方法[J]. 光学仪器,1999,21(6):3-9.
JIANG Yue-juan,XIA Liang. An accurate method of detecting position of images on CCD[J]. Optical Instruments, 1999,21(6):3-9.
[16] 许 昌,周 铭,洛瑞伦,等. 基于面阵CCD成像技术的测量仪器及系统的研制[J].仪器仪表学报,2001,22(4S):218-220.
XU Chang, ZHOU Ming, LUO Ruilun,etal. Measuring Instrument and system Development Based on Matrix CCD Imaging Technology[J]. Chinese Journal of Scientific Instrument, 2001,22(4S): 1469-1473.
[17] 吕 勇,王 凯,刘力双,等.基于单面阵CCD的三维平移测量系统设计[J].北京信息科技大学学报,2011,26(3):29-34.
LU Yong, WANG Kai,LIU Li-shuang,etal. Design of 3-D translational motion measurement system based on single area array CCDs[J]. Journal of Beijing Information Science and Technology University, 2011,26(3):29-34.
