基于激光雷达技术的三维数字露头及其在地质建模中的应用
——以巴楚地区大班塔格剖面礁滩复合体为例
2014-02-10郑剑锋沈安江乔占峰常少英
郑剑锋,沈安江,乔占峰,常少英
(1中国石油天然气集团公司碳酸盐岩储层重点实验室;2中国石油杭州地质研究院)
技术·应用
基于激光雷达技术的三维数字露头及其在地质建模中的应用
——以巴楚地区大班塔格剖面礁滩复合体为例
郑剑锋1,2,沈安江1,2,乔占峰1,2,常少英2
(1中国石油天然气集团公司碳酸盐岩储层重点实验室;2中国石油杭州地质研究院)
介绍了激光雷达技术的工作原理以及数据的采集、处理和解释方法,展示了三维数字露头的构建过程。以塔里木盆地巴楚地区大班塔格剖面中奥陶统一间房组礁滩复合体为研究对象,在真实的三维数字露头地质构架下,以岩相与岩石物性关系为约束,构建了礁滩复合体三维地层结构模型、沉积相模型和储层模型,其结果真实地反映了地质情况。研究表明,基于激光雷达技术的三维数字露头改进了传统的露头建模研究方法,极大地提高了地质模型的精度,能为勘探开发提供有效指导。
激光雷达;三维数字露头;地质建模;礁滩复合体
露头类比研究被认为是垂向分辨率高的单井研究与侧向分辨率高的三维地震资料研究的重要纽带,它对预测地下地质单元的三维展布特征和建立地质模型意义重大。传统的露头研究主要以野外测量、描述、拍照和绘制手工剖面为手段,所建地质模型为二维模型,且精度低、受地形影响大、无法采集高危地区的露头资料。因此,如何建立准确、有效的三维露头地质模型来指导勘探和开发一直是地质工程师们不断努力的目标。
激光雷达,简称LIDAR(Light Detection and Ranging,光探测与测距),该词最早出现在1970年一篇关于大气气溶胶研究的论文中[1],它可分为地面LIDAR和空中LIDAR两种,本文所讨论的为基于地面的LIDAR技术。随着技术的进步,LIDAR的测量精度从最初的米级提高到现在的毫米级,目前主要应用于航空、航天及测绘领域,研究人员可以获得大量包含空间方位及强度信息的激光点,即激光点云,可以说LIDAR技术将是继GPS之后在测绘领域的又一重大技术革命[2]。把该技术应用到露头地层成图研究中,并利用计算机实现可视化,就能形成三维数字露头,可以更客观、全面地认识露头揭示的地质信息,进而建立更真实的三维露头地质模型。近十年来,国外LIDAR技术在露头研究中的应用已较为成熟,如Bellian等[3]建立了基于数字露头的地层模型,并总结了建模方法;Janson等[4]、Phelps等[5]建立了基于数字露头的三维沉积相模型,进而有效地约束地震模型;Zahm等[6]建立了基于数字露头的裂缝发育模型,有效地预测了裂缝的发育规律;美国德克萨斯大学奥斯汀分校甚至对美国、西班牙、爱尔兰、法国、南非等国家和地区的数十个露头进行了扫描和三维刻画,建立了相应的数字露头知识库,形成了一系列基于数字露头的地质建模方法和技术。然而,国内对LIDAR技术的应用研究还相当薄弱,尚处于起步阶段,只有一些综述性的报道或工程测绘应用的实例,该项技术在地学中的应用则更是鲜有发表[7-12]。
本文介绍了LIDAR技术的基本原理及本次研究所用仪器的情况,并以塔里木盆地巴楚地区大班塔格剖面中奥陶统一间房组礁滩复合体为研究对象,以如何构建三维数字露头为重点,详细讨论了LIDAR数据的采集、处理及解释方法,并应用三维数字露头构建了礁滩复合体的三维地质模型,对比传统露头建模方法,其精度和实用性都得到了提高。虽然目前在国内基于LIDAR技术的三维数字露头建模技术研究还处于初级阶段,但已有数家石油地质科研单位引进了LIDAR扫描仪及相应的建模技术,相信未来其应用前景将得到拓展。
1 LIDAR技术原理及仪器简介
所有的LIDAR扫描仪都基于相同的工作原理:一束激光从激光枪中射向远程目标,碰到目标后反弹回来,被检测器接收。根据光的双程传播时间,除以2,再乘以光的速度,就能得到准确的高程z值;同时,基于发射装置(或激光偏转镜)的位置就能进行空间定位,计算出准确的x、y值[3]。三维数字露头的创建就是利用LIDAR扫描仪对露头进行精细扫描,得到大量的包含x、y和z的空间方位信息和反射强度(I)信息的激光点。这些激光点的集合在同一空间参考系下表达目标的空间分布和表面特性,就叫激光点云。激光点云在随后的计算机处理中会被转换为三角面,产生一个凹凸不平的近于真实的三维露头面,从而构建高精度的数字露头。
本次研究所用的地面LIDAR扫描仪为加拿大Optech公司所产,型号为ILRIS-3D,激光波长为1500nm,发射频率为2500~3500Hz,最大测量距离1700m,测量精度7mm,整体具有扫描精度高、体积小的特点。仪器内部配置有310万像素的数码相机和LCD监视器,目标区域和扫描状态可直接显示在屏幕上,此外,仪器表面具有视频接口、网络接口和USB接口,可以通过无线PDA(掌上电脑)或笔记本电脑直接控制数据的采集,所得到的数据能直接写入可擦写的存储器中。仪器使用简单,可单人独立操作。同时,该仪器的设计适用于恶劣的野外条件,最佳作业温度0~40℃,且具有很好的防水性。
2 基于LIDAR技术的三维数字露头构建方法
2.1 LIDAR扫描仪数据采集
好的露头能使地面LIDAR扫描仪获得更强的激光反射强度,因此在采集数据前,选择露头非常重要。地面LIDAR扫描仪最佳的扫描对象是垂直的峭壁、峡谷或公路两侧的陡峭岩壁,当露头面是连续的、同时又具有不同方位的时候,那么根据数字露头所建立的地质模型就越能代表真实的地质情况。
本次研究的塔里木盆地巴楚地区大班塔格剖面中奥陶统一间房组8号礁滩复合体[13]就是一个较好的三维露头实例(图1),它具有近垂直、植被覆盖少的特点,其规模为100m×20m,能清楚地区分出礁滩复合体的各个微相,露头主体部分呈小半圆柱面形态,整个扫描可以固定在一个地点,不需要平移LIDAR扫描仪,只要转动三角架上的托盘即可对不同方向的露头进行扫描。在数据采集之前,首先需要对露头进行精细的解剖,并根据研究需要,系统地对每条剖面进行采样,同时对采样点及露头中的特殊现象做好标记。样品的岩性、物性分析资料能使数字露头所包含的信息更丰富、更准确,从而构建成高精度的三维数字露头。

图1 塔里木盆地巴楚地区大班塔格剖面中奥陶统一间房组8号礁滩复合体
在进行数据采集时,先安装好LIDAR扫描仪,对准需要扫描的露头起点,然后利用无线掌上电脑(或通过网线与LIDAR扫描仪连接的手提电脑)设置天气模式、扫描范围和分辨率等参数。扫描所需时间主要由分辨率和距离决定,通常,以5cm分辨率扫描一幅150m×50m、距离露头500m远的图像,需要约20min。针对本例,以2cm分辨率、80m远的位置扫描45m× 25m规模的露头,所需时间为11min。在进行数据采集的同时,还需要在仪器位置,利用高分辨率数码相机对扫描的露头进行拍照,以此获得与LIDAR扫描仪扫描具有相同视角的高清晰度露头照片。
对一个剖面进行连续扫描时,每一次新的扫描都要和前一次扫描有重合的部分。因为在随后的数据处理中,需要根据相邻两幅扫描图像中重合部分的一些相同特征点进行图像拼接,一般情况下,10%~20%左右的重合就可以较好地完成图像拼接。当遇到一些障碍物如建筑物、树木等妨碍最佳露头面扫描时,可以从障碍物两侧斜着扫描,但会造成一些地层信息的缺失,在三维激光点云图上表现为黑洞或阴影。此外,如果遇到扫描的露头很大、分辨率又较低(>10cm)、并且露头是不连续的情况,还需要对每个扫描的位置进行精确的GPS定位。
2.2 LIDAR数据处理
LIDAR数据采集完成后,首先利用Parser软件对原始数据进行解析,即把BLK格式文件转化为PF格式文件,然后把数据导入PloyWorks软件,就能够看到激光点云图像,并可以进行三维可视化浏览。同时,根据研究需要,对图像进行平滑处理和删除一些无用激光点(平地、树木等)的编辑处理。完成对所有扫描的激光点云图像的编辑后,还需要把这些图像拼接在一起,形成一个完整的三维露头面。
前已述及,每一次扫描,都需要移动仪器(包括旋转固定在三脚架上的托盘),而LIDAR扫描仪单次扫描的激光点云都有其自己的相对坐标系统。因此,每一次扫描,仪器就会自动地在三维空间中重置一个新的笛卡尔坐标起点,即使是相邻连续的两次扫描,它们的坐标起点也是完全不同的。为了在三维空间中拼接多次扫描的激光点云图像,就需要通过转换矩阵,变换多次扫描的激光点云到第一次扫描的坐标系统中。应用PloyWorks软件的IMALign模块可实现这一过程,即在两次扫描的重合区域标定一些相同的特征点(根据3点确定一个面的原则,至少选择3个特征点),软件可以根据这些特征点进行半自动地拼接(图2)。当以同样的方法,完成所有扫描的激光点云图像的拼接后,完整的三维数字露头面就显现出来了。此外,还可以在PolyWorks软件中,应用最优化算法完成对激光点云图像进行最优化处理,使拼接误差达到最小,从而构成完美的三维数字露头面(图3)。
2.3 LIDAR数据解释
完成LIDAR数据处理后,就可以在三维空间中进行露头面解释,这一过程也是在PolyWorks软件中进行。与地震解释中沿地震体的某个切面追踪地层面相似,LIDAR数据解释就是根据露头上的一些地层标记,在三维激光点云图像中追踪地层面,并实现数字化的过程。由于三维激光点云图像为灰度图像,并且局部可能存在黑洞和阴影,有时会影响地层追踪的准确性。此时,如果配合标有地层记号的高分辨率的露头照片就能很好地克服这一缺陷,从而得到准确的解释结果,这也是前文所述及的、在进行数据采集的同时要拍摄与扫描图像具有相同视角的高清晰照片的原因。完成所有地层面的追踪、解释后,需要把各种测量的剖面信息如采样点位置、断层及特殊沉积、构造现象等,手动加载到三维露头面中,这些剖面信息在三维空间中的位置都是与露头面匹配的,所以可以象地震解释中的单井资料一样,作为露头中虚拟井输出,并在随后地质建模中发挥重要作用。加载完所有的剖面信息后,一个完整的三维数字露头就构建完成了(图4)。本实例中,共解释出10个地层单元、19个小层、两期障积礁体、10种沉积微相类型,加载了9条实测剖面信息。数字露头中,所有的解释、测量信息甚至是整个露头面都可以ASCII或DXF格式输出到GoCAD、Petrel等建模软件中。
3 三维数字露头在地质建模中的应用
三维数字露头不仅有助于地质研究人员在以后的工作中可以随时对露头进行分析、研究,还可以为之后的野外考察进行预演,而且保存、归档也相当方便,同时还可用于教学。通常,露头研究中最重要的任务是构建露头地质模型,用于指导地下的勘探和开发。传统的露头地质模型是二维的,但随着油气田勘探、开发的不断深入,转向以建立定量的三维地质模型为目标,是地质模型研究向着更高阶段发展的体现[14],而基于LIDAR技术的三维数字露头,可使这个目标得以实现。

图2 LIDAR激光点云图像拼接

图3 塔里木盆地大班塔格剖面一间房组礁滩复合体三维激光点云图
本次研究以塔里木盆地巴楚地区大班塔格剖面中奥陶统一间房组生物礁滩复合体的三维数字露头为例,在GoCAD建模软件中建立了三维地质模型。其实质就是应用三维数字露头,综合地质背景、岩性及物性等资料,进行三维定量随机建模,最后得到一个最佳模型。其构建思路可以细分为三步:(1)模拟地层面,构建三维地层结构模型;(2)模拟地层单元控制的三维沉积相模型;(3)模拟沉积相控制的三维储层模型。

图4 塔里木盆地大班塔格剖面一间房组礁滩复合体数字露头
3.1 构建三维地层结构模型
三维地层结构模型的构建是以数字露头中的三维地层界线为出发点进行外推,得到三维地层界面,即每个地层单元的顶面、底面,并在三维地层面间建立恰当的网格。地层界面的准确性和空间展布特征是建立逼近真实地层结构模型的基础。本例中,一间房组礁滩复合体结构模型清楚地展示了各个地层界面的形态和地层单元的厚度(图5a)及两期障积礁在时间和三维空间上的发育关系(图5b),它们与实际地质情况相符合。

图5 塔里木盆地大班塔格剖面一间房组礁滩复合体三维地层结构模型
3.2 模拟地层单元控制的三维沉积相模型
前已述及,在三维数字露头中加载了采样点等所测剖面的信息,那么地层剖面位置在三维空间中就是固定的,因此可以把所测剖面视为虚拟井。通过给虚拟井加载岩性信息,并在每个地层单元内分别进行沉积微相的数值模拟,就可以表现地层单元内各种沉积微相在横向上和垂向上的变化,从而建立沉积相模型(图6),图6a、6b分别为两期障积礁的三维沉积相模型。模型真实地表现了不同沉积微相在空间上的组合关系,其结果符合礁滩复合体的理论微相组合模式。
3.3 模拟沉积相控制的三维储层模型
由于塔里木盆地大班塔格剖面一间房组生物礁滩复合体的物性具有相控特征[13],所以当构建完沉积相模型后,就可以构建沉积相控制下的储层模型。与建立沉积相模型相似,通过给虚拟井加载剖面样品的实测孔隙度和渗透率资料,并在每个沉积微相单元内分别进行孔隙度和渗透率的数值模拟,就得到了整个礁滩复合体的储层模型(图7)。从图中可以看出,图7c和图7d较图7a和7b更直观地表示出储层物性与露头的对应关系。三维储层模型精细地刻画出了台缘滩物性明显高于台内滩、礁基物性最好、礁核物性较差的储层物性分布规律,其真实性和实用性较二维模型有明显提高,这对塔里木盆地塔中地区上奥陶统良里塔格组礁滩型储层的油气田开发也具有一定指导意义。
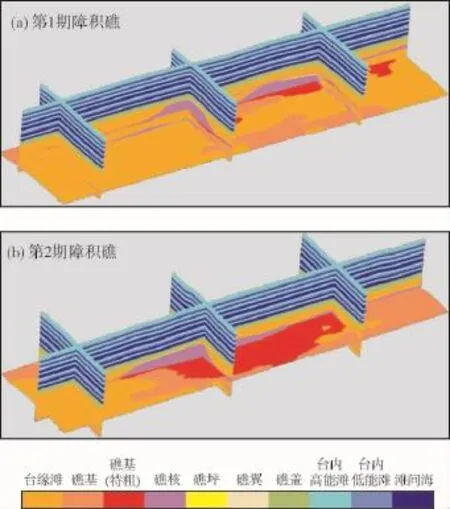
图6 塔里木盆地大班塔格剖面一间房组礁滩复合体三维沉积相模型
与传统的二维露头地质模型相比,首先,用于三维地质建模的露头为连续的高精度测量的三维数字露头,是真实地质构架的反映,而二维地质建模往往表现为抽象化和模型化;其次,三维储层地质模型以真实的岩相特征及其组合关系为基础,以岩相与岩石物性的相互关系为约束,在进行数值模拟时,能够相对真实地反映实际地质情况,而二维地质模型则人为主观因素相对更多些;第三,三维地质模型较二维地质模型的表现形式更加直观、精细,同时也更加容易修改和校正。

图7 塔里木盆地大班塔格剖面一间房组礁滩复合体三维储层模型
4 结论
(1)LIDAR技术是一种改进现有野外工作的非常有用的方法,它量化了地质工程师们所观察的结果。通过对露头进行扫描、采集激光点云数据,并进行处理和解释,所得到的三维数字露头真实地保留了实际露头的地质信息,使地质工程师们在室内描述和分析露头成为可能。
(2)把三维数字露头应用到巴楚地区大班塔格剖面礁滩复合体实际的地质建模中。实践证明,在真实的地质构架下,以真实的岩相特征和组合关系为基础,以岩相与岩石物性相互关系为约束,通过露头中解释的地层面控制地层单元结构,在地层单元中构建沉积微相的空间展布模型,继而构建相控的储层地质模型,极大地提高了露头地质模型的精度,真实地反映了实际地质情况,可为勘探开发提供有效指导。
[1]SCHUSTER B G.Detection of tropospheric and stratospheric aerosol layers by optical radar(LIDAR)[J].Journal of Geophysical Research,1970,75:3123-3132.
[2]戴升山,李田凤.地面三维激光扫描技术的发展与应用前景[J].现代测绘,2009,32(4):11-12,15.
[3]BELLIAN J A,KERANS C,JENNETTE D C.Digital outcrop models:Applications of terrestrial scanning lidar technology in stratigraphic modeling[J].Journal of Sedimentary Research,2005,75(2):166-176.
[4]JANSON X,KERANS C,BELLIAN J A,et al.Three-dimensional geological and synthetic seismic model of Early Permian redeposited basinal carbonate deposits,Victorio Canyon,West Texas[J].AAPG Bulletin,2007,91(10):1405-1436.
[5]PHELPS R M,KERANS C,SCOTT S Z,et al.Three-dimensional modelling and sequence stratigraphy of a carbonate ramp-to-shelf transition,Permian Upper San Andres Formation[J].Sedimentology,2008,55(6):1777-1813.
[6]ZAHM C K,ZAHM L C,BELLIAN J A.Integrated fracture prediction using sequence stratigraphy within a carbonate fault damage zone,Texas,USA[J].Journal of Structural Geology,2010,32(9):1363-1374.
[7]马洪超.激光雷达测量技术在地学中的若干应用[J].地球科学中国地质大学学报,2011,36(2):347-354.
[8]刘昌军,丁留谦,宁保辉,等.基于激光点云数据的裂隙岩体渗流场的无单元法模拟[J].岩石力学与工程学报,2011,30 (11):2330-2337.
[9]周征.地面激光雷达扫描技术在数字露头研究中的应用[J].投资与合作:学术版,2012(4):147.
[10]李显巨.基于LiDAR技术的复杂地质环境区滑坡识别研究[D].中国地质大学(武汉),2012.
[11]尹太举,张昌民,罗喻洁,等.LIDAR技术及其在露头研究中的应用[J].高校地质学报,2013,19(增刊):351-352.
[12]朱如凯,白斌,袁选俊,等.利用数字露头模型技术对曲流河三角洲沉积储层特征的研究[J].沉积学报,2013,31(5):867-877.
[13]沈安江,郑剑锋,顾乔元.塔里木盆地巴楚地区中奥陶统一间房组露头礁滩复合体储层地质建模及其对塔中地区油气勘探的启示[J].地质通报,2008,27(1):137-148.
[14]吴胜和,李宇鹏.储层地质建模的现状与展望[J].海相油气地质,2007,12(3):53-60.
编辑:黄革萍
LIDAR-based 3D Digital Outcrop Modeling and Application in Geologic Modeling: A Case of Modeling of Middle Ordovician Reef-beach Carbonate Body at Dabantage Outcrop in Bachu Uplift,Tarim Basin
Zheng Jianfeng,Shen Anjiang,Qiao Zhanfeng,Chang Shaoying
The working principle of LIDAR and the methods of LIDAR data acquisition,processing and interpretation are introduced and the establishment process of a digital outcrop is shown.The Middle Ordovician Yijianfang reef-beach facies carbonate body at Dabantage outcrop in Bachu Uplift is selected to set up a 3D digital outcrop.According to the real geological framework of 3D digital outcrop,and constrained by the lithology and physical property of the body,the three-dimensional stratum structure model,sedimentary facies model and reservoir model are set up.All the models match well with the actual geological conditions.It is shown that the technology of LIDAR-based 3D digital outcrop can improve the investigation method of conventional outcrop modeling and increase the accuracy of geologic models.
LIDAR;3D digital outcrop;Geologic modeling;Reef-beach facies body;Tarim Basin
TE19
:A
10.3969/j.issn.1672-9854.2014.03.010
1672-9854(2014)-03-0072-07
2013-12-05;改回日期:2014-04-21
本文受国家科技重大专项“大型油气田及煤层气开发”(编号2011ZX05004-002)资助
郑剑锋:1977年生,高工。2004年长江大学毕业,获硕士学位。从事碳酸盐岩沉积、储层方面的研究工作。通讯地址:310023浙江省杭州市西溪路920号;E-mail:zhengjf_hz@petrochina.com.cn
Zheng Jianfeng:male,MSc.,Geologist.Add:PetroChina Hangzhou Institute of Geology,920 Xixi Rd.,Hangzhou,Zhejiang,310023,China