摆动喷管的Terminal滑模鲁棒控制
2014-02-10王卫红孙良桦张武龙
王卫红, 孙良桦, 张武龙
(1.北京航空航天大学飞行器控制一体化技术重点实验室,北京 100191;
2.北京航空航天大学自动化科学与电气工程学院,北京 100191;
3.北京仿真中心导弹控制系统仿真国防科技重点实验室,北京 100854)
0 引言
传统的导弹控制方式是基于空气动力控制,采用这种控制方式的导弹很难满足高要求的快速性和机动性。推力矢量控制是一种通过控制主推力相对弹轴的偏移产生改变导弹方向所需力矩的控制技术。这种方法不依赖于气动力,因此在低速高空状态下仍能产生较大的控制力矩[1]。推力矢量控制方式可以分为很多种,采用摆动喷管推力矢量控制以其较好的方向性成为较为具有发展前景的方式之一。摆动喷管推力矢量控制伺服系统是导弹控制系统的执行机构,通过系统给定的控制指令控制喷管的摆角变化,从而产生侧向力和侧向力矩,进而改变导弹在飞行中的姿态和方向,伺服系统的稳定性关系到导弹飞行的稳定性,因此,伺服系统控制是摆动喷管推力矢量控制的重要组成部分[2]。
1 摆动喷管伺服系统建模
根据摆动喷管摆动方式建立摆动喷管坐标系和伺服机构安装方式[3]如图1所示,其中O为摆动喷管的回转中心,即坐标原点,OX为导弹的弹体轴向,指向导弹头的方向为正方向,OY与导弹坐标系纵轴方向平行,且方向相同,OZ按照右手定则确定。通过力学方程建立,摆动喷管采用“X”布局方式。
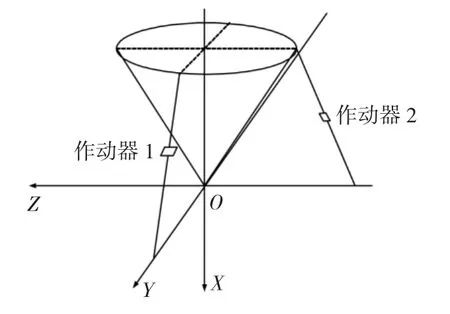
图1 伺服系统放置示意图Fig.1 The schematic diagram of the placement of servo system
两路伺服作动器安装在相互垂直的XOY与XOZ平面,作动器的下支点与喷管摆心在同一个平面内,这样可以减小作动器在运动时交连干扰的影响。在喷管摆动时,作动器1在XOY平面而作动器2在XOZ平面,控制导弹的偏航和俯仰只需分别控制作动器1和作动器2的解算出的摆角进行相应的动作即可。
整个伺服系统由指令控制信号与反馈信号组成综合控制信号,经过控制器,产生信号,驱动功率放大器,从而带动伺服阀进行运动,通过液压作动器至舵机轴输出,同时舵机轴输出带动反馈电位计形成反馈信号,从而形成闭环回路。电液伺服系统控制原理图如图2所示。
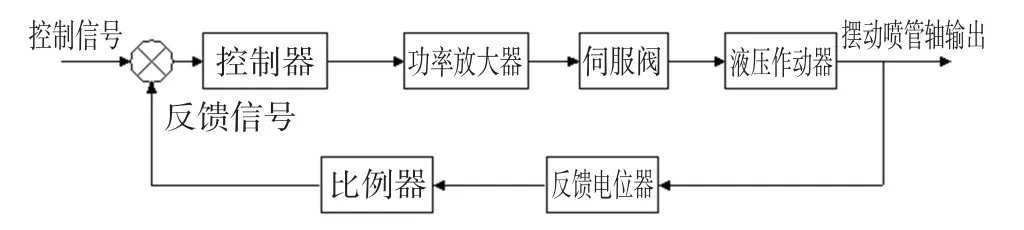
图2 电液伺服系统控制原理图Fig.2 The schematic diagram of the electro-hydraulic servo system
1.1 摆动喷管负载分析
系统的负载力矩[4]主要有摩擦力矩、位置力矩、恒定力矩、惯性力矩和阻尼力矩,其整体表达式为

式中:MJ为惯性力矩;Mf为摩擦力矩;Mδ为位置力矩;为阻尼力矩;MF为恒定力矩;J为伺服系统惯量之和;θ为摆动转角;Kθ为位置力矩系数;B为阻尼力矩系数。
1.2 摆动喷管伺服机构建模
电液伺服机构主要由动力装置、液压油源回路和伺服控制电路三大部分组成。其中,伺服阀可以视为线性位移,因此功率放大器和伺服阀可由式(2)和式(3)表示。即

式中:iV为放大器输出电流,kui为放大器静态放大系数;KV为伺服阀线性放大系数,实际系统的伺服信号放大器的输出具有限幅特性。
液压作动器可以由下述方程[5]来描述:
1)阀的线性化流量方程

式中:QL为电液伺服阀的负载流量;QV为电液伺服阀理论输出量;Kc为电液伺服阀的流量-压力系数,PL为液压马达的负载压力。
2)液压马达流量方程
液压马达的负载流量由3部分组成:马达传动所需流量Q1,马达内、外泄露损失的流量Q2和因油液压缩而产生的附加流量Q3,因此

式中:A为作动器活塞有效面积;B为液压油容积弹性模数;R为喷管零位绕摆动的力臂长;VT为有效存油容积为液压马达轴的转角;Ct为液压马达总泄露系数。
3)力矩平衡方程[5]
假设f3(v)=5,则假设f3(v)=4,则假设f3(v)=3,则假设f3(v)=2,则假设f3(v)=1,则假设f3(v)=0,则

式中:T为施加于液压系统的驱动力矩;I为液压马达和负载的总惯量;G为负载的扭转弹簧刚度;TL为作用于马达轴上的干扰力矩;Bm为液压马达和负载的粘性阻尼系数。
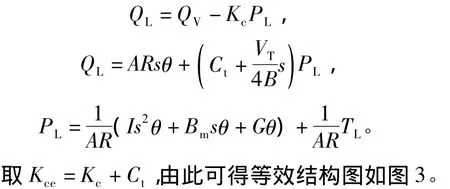
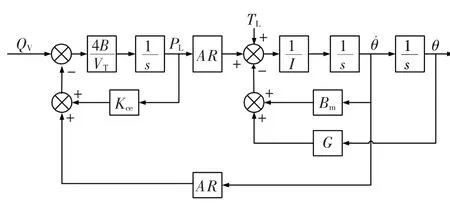
图3 动力机构等效结构框图Fig.3 The equivalent block diagram of the power institutions
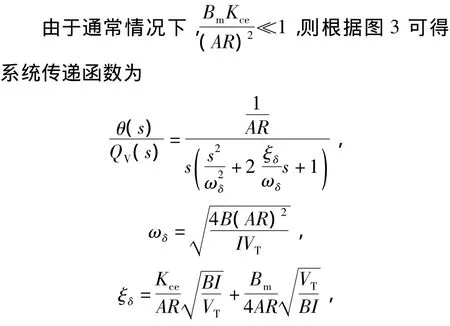
将式(4)~式(6)进行拉式变换得式中:ωδ为液压固有频率;ξδ为液压相对阻尼系数。

图4 电液伺服系统回路基本结构图Fig.4 The basic loop structure diagram of the electro-hydraulic servo system
结合电液伺服系统原理图,伺服阀的作用可视为比例环节,由此,可得到电液伺服系统回路基本结构图如图4所示。伺服系统简化后的参数如下:反馈放大系数kf=57.3 V/rad;动力系统结构参数KA=57.3/AR;伺服阀线性放大系数KV=12 cm3/(s·mA);放大器静态放大系数kui=5 mA/V;液压相对阻尼系数ξδ=0.2;喷管零位绕摆动的力臂长R=17 cm;放大器最大输出电流IVm=15 mA;液压固有频率ωδ=94.21/s;作动器有效面积A=10 cm2。
2 Terminal滑模鲁棒控制器设计
针对负载力矩的影响,首先设计干扰观测器以减小其影响,再在其基础上进一步设计控制器。快速Terminal滑模控制可使系统状态在有限时间内收敛为零,突破了普通滑模控制在线性滑模面条件下状态渐近收敛的特点,系统的动态性能优于普通滑模控制。并且相对于线性滑模控制,快速Terminal滑模控制无切换项,可有效地消除抖振[6]。因此,控制器设计采用Terminal滑模控制器与干扰观测器相结合的方式,其原理框图如图5所示。

图5 控制系统原理框图Fig.5 The schematic diagram of the control system
2.1 干扰观测器设计
干扰观测器(DOB)[7]的基本思想是将外部力矩干扰及模型参数变化造成的实际对象与名义模型输出的差异,统统等效到控制输入端,即观测出等效干扰,在控制中引入等量的补偿,实现对干扰完全抑制。干扰观测器原理框图如图6所示。

图6 干扰观测器原理框图Fig.6 The schematic diagram of the DOB

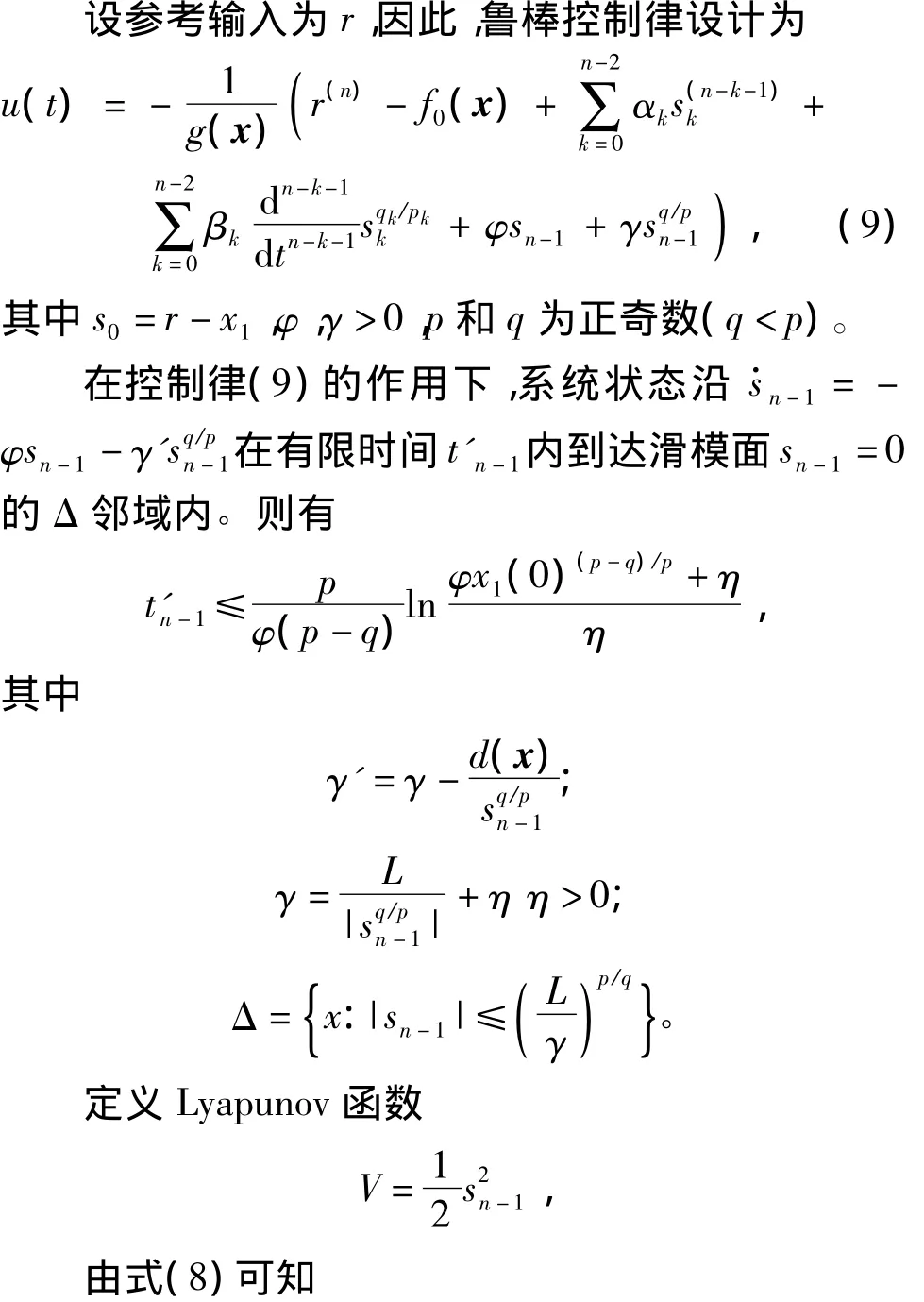
2.2 具有鲁棒性的全局快速Terminal滑模控制器设计

采用具有递归结构的快速滑动模态[6]为
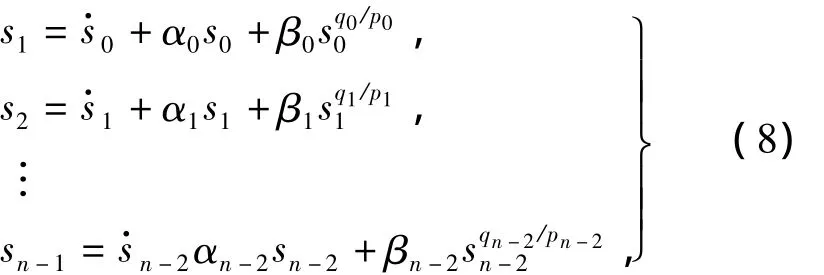
其中:αi,βi>0 且 qi,pi(i=0,1,…,n -2)为正奇数且qi<pi。快速Terminal滑模控制可使系统状态在有限时间内收敛为零,突破了普通滑模控制在线性滑模面条件下状态渐近收敛的特点,系统的动态性能优于普通滑模控制。可见,相对于线性滑模控制,快速Terminal滑模控制无切换项,可有效地消除抖振。
3 伺服系统仿真及结果
指令参考信号分别选用θ=A的阶跃信号和θ=Asin(2πFt)的正弦信号,其中 A=5,F=1 Hz。与趋近律滑模控制方式进行对比,仿真结果如图7至图12所示。
从图7和图8可以看出,在要求系统响应不出现大幅度抖振的情况下,由于负载力矩的作用,不使用DOB无法达到系统精度。另一方面可以看出,采用具有鲁棒性的全局快速Terminal滑模控制方式系统跟踪误差的幅值也得到了一些降低,比起普通滑模控制,具有更高的鲁棒性。

图7 趋近律SMC与TerminalSMC控制方式下系统阶跃响应Fig.7 The step response of normal SMC and terminal SMC control mode
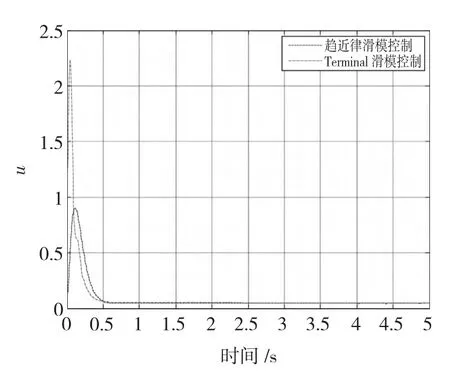
图8 趋近律SMC与TerminalSMC控制方式下滑模控制器输出Fig.8 The control output of normal SMC and terminal SMC control mode

图9 趋近律SMC+DOB与TerminalSMC+DOB控制方式下系统阶跃响应Fig.9 The step response of normal SMC+DOB and terminal SMC+DOB control mode

图10 趋近律SMC+DOB与TerminalSMC+DOB控制方式下控制器输出Fig.10 The control output of normal SMC+DOB and terminal SMC+DOB control mode
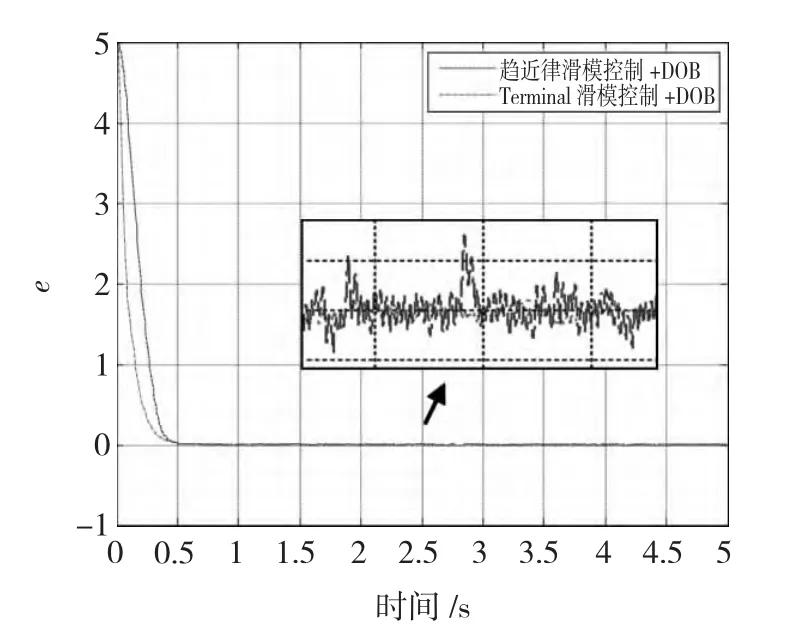
图11 趋近律SMC+DOB与TerminalSMC+DOB控制方式下的误差曲线Fig.11 The error curve of normal SMC+DOB and terminal SMC+DOB control mode

图12 趋近律SMC+DOB与TerminalSMC+DOB控制方式下系统的正弦响应Fig.12 The sinusoidal response of normal SMC+DOB and terminal SMC+DOB control mode
将图7与图9对比可以看出,在加入了DOB的情况下,系统跟踪精度提高,可见,DOB能够有效减小负载力矩对系统的影响。从图9至图11可以看出,趋近律滑模控制方式会引起高频的抖振,而具有鲁棒性的全局快速Terminal滑模控制方式能够有效地减小抖振,并且可以加快误差收敛速度,提高了系统的快速性,从而提高了系统的跟踪性能,在保证跟踪精度的前提下,具有鲁棒性的全局快速Terminal滑模控制方式能够更快的达到系统的给定指令。
从以上仿真结果中可以看出,具有鲁棒性的全局快速Terminal滑模控制方法由于在滑动超平面的设计中引入了非线性函数,且不含有切换项,因此能够有效减小抖振,并且提高了系统的快速性,在不出现大幅度抖振的前提下,DOB通过在控制量中引入等量补偿从而能够有效减小负载力矩对系统的影响,因此,基于DOB的具有鲁棒性的全局快速Terminal滑模控制方式在摆动喷管控制的动态跟踪中能够保证跟踪精度和快速性,并且对外部的负载力矩干扰具有良好的鲁棒性,从而证明了该方法在摆动喷管控制中的可行性。
5 结语
由于摆动喷管推力矢量控制会产生大干扰力矩,因此,摆动喷管伺服机构应具有高控制精度和快速性。仿真结果表明,采用Terminal鲁棒滑模控制器能够很好的满足摆动喷管推力矢量伺服系统的性能要求,并且验证了算法的有效性。为进一步研究摆动喷管伺服机构提供了良好的理论基础。
[1]张军峰,胡寿松.多重核学习非线性时间序列故障预报[J].控制理论与应用,2008,25(6):1142 -1144.ZHANG Junfeng,HU Shousong.Nonlinear time series fault prediction by multiple kernel learning[J].Control Theory & Applications,2008,25(6):1142 -1144.
[2]王卫红,姚志超,郑连强.三轴飞行转台自适应复合控制方法[J].电机与控制学报.2011,15(9):74-79.WANG Weihong,YAO Zhichao,ZHENG Lianqiang.Adaptive compound control method for the three-axis flight simulator[J].E-lectric Machines and Control,2011,15(9):74 -79.
[3]SUN Lianghua,WANG Weihong,ZHANG Wulong.Fuzzy PID robust control for swing nozzle[C]//The 2012 24th Chinese Control and Decision Conference.2012:3616 -3619.
[4]刘宏博,周军,周凤岐.推力矢量控制伺服系统的负载及负载匹配[J].弹箭与制导学报,2006:740-742.LIU Hongbo,ZHOU Jun,ZHOU Fengqi.The load and load matching of servo system for thrust vector control[J].Journal of Projectiles,Rockets,Missiles and Guidance,2006:740 -742.
[5]杨勇.多自由度液压伺服系统的控制策略研究[D].长沙:中南大学,2006.
[6] 刘金琨.滑模变结构控制MATLAB仿真[M].北京:清华大学出版社,2005:333-362.
[7]扈宏杰,王元哲.机载光电平台的复合补偿控制方法[J].光学精密工程,2012,20(6):1272-1281.HU Hongjie,WANG Yuanzhe.Composite compensation control scheme for airborne opto-electronic platform[J].Optics and Precision Engineering,2012,20(6):1272-1281.
(编辑:于智龙)