无人机电气系统与机载通信设备电磁兼容问题研究*
2014-02-10谢瑞云毛得明
谢瑞云,毛得明,向 敏
(1.西南通信研究所,四川成都610041;2.成飞公司四川成都610092)
无人机电气系统与机载通信设备电磁兼容问题研究*
谢瑞云1,毛得明1,向 敏2
(1.西南通信研究所,四川成都610041;2.成飞公司四川成都610092)
针对无人机平台电气系统对机载通信设备干扰问题进行了研究。在对无人机平台电气系统分析的基础上,通过信道模拟法,分析了无人机平台电气系统干扰通信设备的途径。在此基础上,提出了快速、有效的无人机平台电气系统干扰源定位与整改方案,并依据真实环境制定了简单、有效的电磁兼容整改措施。经检验,无人机平台电气系统对机载通信设备的干扰量下降30 dB以上,由原来无人机平台工作时通信设备接收背景噪声-52 dBm,改善为接收机背景噪声能达到-87 dBm,最终满足了无线通信指标要求。
电磁兼容 无人机 机载通信设备
0 引 言
无人机平台电气系统与通信设备之间存在严重电磁兼容问题,主要现象包括:无人机平台电气系统加电后,影响通信设备有效作用距离;无人机平台螺旋桨电动机和舵机工作时,进一步影响通信设备接收性能;通信设备处于全功率发射状态时,无人机舵机受到干扰,出现舵机抖动现象;通信设备处于全功率发射状态时,GPS接收机受到干扰,出现丢星,无法定位等现象。
无人机平台电气系统包括蓄电池、螺旋桨电动机、电调、舵机、飞控计算机、GPS接收机、遥测遥控等电气设备。无人机平台电气设备中存在大量干扰源和电感负载,可以通过电源线传导耦合或辐射耦合到机载通信设备中,严重影响机载通信设备的性能。分析、解决无人机平台电气系统与机载通信设备的相互干扰问题已经迫在眉睫。
无人机平台电气系统是一个复杂的系统,分析和诊断无人机平台电气系统对机载通信设备的影响是一个复杂电磁兼容性问题。其中本机载通信设备在无人机平台电气系统未加电工作时,通信设备接收灵敏度为-87 dBm,而加电工作时,频点250 MHz干扰最大,接收灵敏度只有-52 dBm,是一个典型的电磁兼容问题。采用快速、有效电磁兼容诊断实验方案是分析、解决该问题的关键,本文采用排除法与近场定位法相结合的方案,快速定位电磁兼容性问题,采用行之有效的措施和简化模拟的验证手段,最终解决了该电磁兼容性问题。
1 电磁干扰诊断方案
本文采用如下2个实验方案,对该问题进行分析、定位与验证。
1.1 实验方案一:排除无传导干扰试验
干扰耦合途径分为两类:传导耦合途径和辐射耦合途径[1-2]。因此首先要判断通信设备受无人机平台电气系统干扰的耦合途径。设计判断有无传导干扰试验,测试框图如图1所示,无人机平台其它设备都按照工作时状态连接好,对比采用外接电源供电和采用机载供电通信设备接收灵敏度大小,经过试验测试,通信设备接收灵敏度都为-87 dBm,这表明无人机平台电气系统影响通信设备灵敏度是通过辐射耦合方式,排除传导干扰耦合方式。
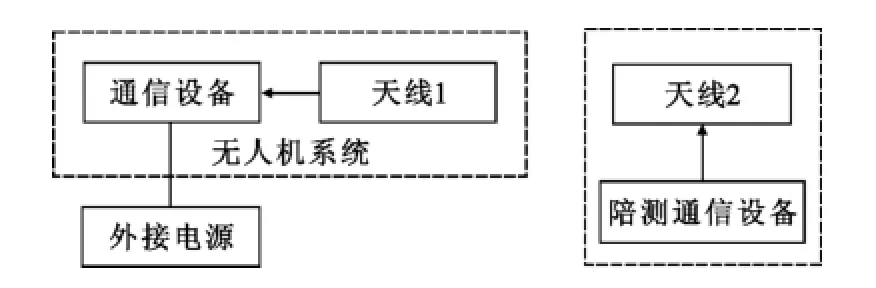
图1 传导干扰试验框Fig.1 Experimentation of conduction interference
1.2 实验方案二:辐射干扰源定位试验
无人机内电气及接地的连接示意图,如图2所示,飞控计算机控制螺旋桨电机、4个舵机,各设备外壳地与机架良好搭接。设计3个辐射源定位试验,条件分别为:
试验条件一:无人机平台通电时,用近场探头测试飞控计算机与舵机连接线上辐射出来的干扰信号,测试结果如图3所示。
试验条件二:无人机平台通电时,用近场探头测试飞控计算机外壳缝隙辐射出来的干扰信号,测试结果如图4所示。
试验条件三:螺旋桨电机空载工作时,用近场探头测试电调与螺旋桨电机连接线辐射出来的干扰信号,测试结果如图5所示。
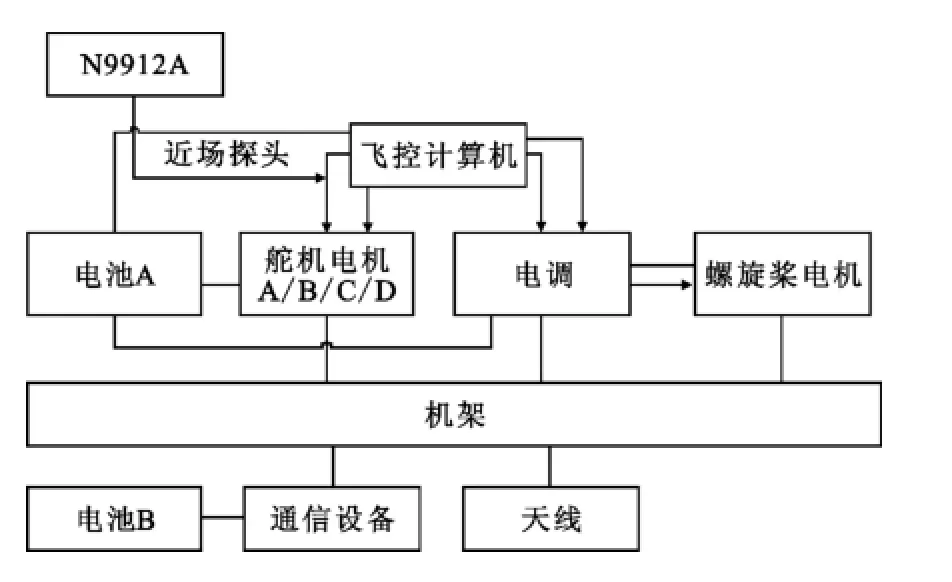
图2 无人机电气系统对任务设备影响测试框Fig.2 Influence test of UAV electrical system on mission equipment

图3 从飞控计算机与舵机连接线辐射的干扰噪声Fig.3 Interference noise radiation from connection line between flight control computer and steering gear
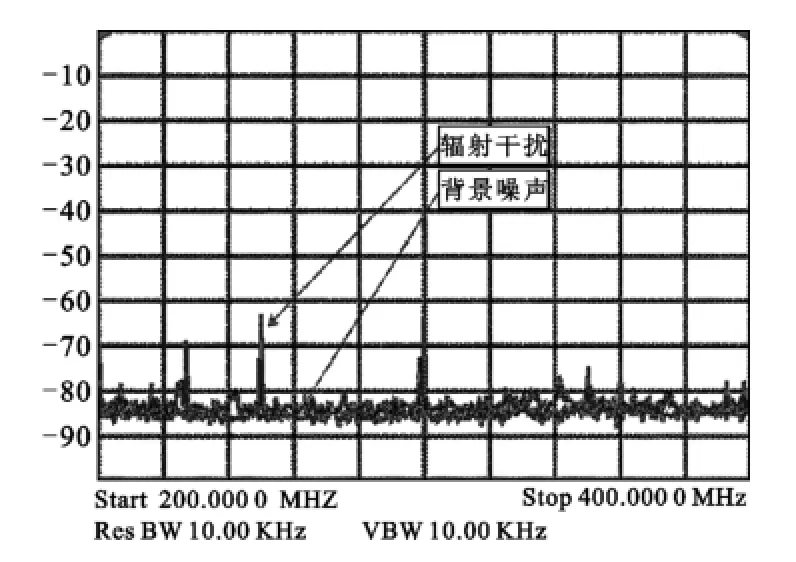
图4 飞控计算机外壳缝隙辐射的干扰噪声Fig.4 Interference noise radiation from casing slot of flight control computer
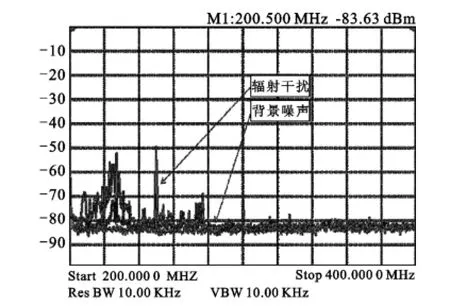
图5 从电调与螺旋桨电机连线辐射的干扰噪声Fig.5 Interference noise radiation from connection line between the electrical adjuster and motor
2 原因分析
经过问题定位试验,并对问题进行分析,无人机平台电气系统干扰通信设备间正常工作主要是通过辐射耦合途径,原因分析如下:
从图3、4测试结果可知,无人机平台电气系统加电后,背景噪声中出现250 MHz、300 MHz单音强干扰信号(最大幅度约为-50 dBm),这是由于飞控计算机内50 MHz晶振的谐波通过飞控计算机壳体缝隙及飞控计算机与螺旋桨电机、各舵机的连接线辐射到自由空间而引起。飞控计算机结构如图6所示,采用壳体上下都开盖,侧面开安装孔,且72芯片插头未采用滤波措施。因此,飞控计算机辐射干扰源之一,它与舵机电机连接线成为主要的耦合途经,同时飞控计算机外壳也是耦合途径之一[3-4],从而影响任务设备的接收性能。

图6 飞控计算机外壳及插头结构示意Fig.6 Structural diagram of aircraft-control-computer shell and joints
无人机平台电气系统加电后,背景噪声整体提高5~10 dB,这是由于飞控计算机通过信号线分别向螺旋桨电机及各舵机发送差分PWM控制信号,引起的宽频谱干扰。
如图5所示,螺旋桨电机工作时,会通过电源线辐射出部分的宽频谱干扰信号,进一步恶化通信设备的接收性能。其中螺旋桨电机与电调电气连接关系如图7所示,目前螺旋桨电机与电调之间连接线没有进行屏蔽处理,飞控计算机与电调之间、动力电池与电调之间都只有部分进行屏蔽处理。
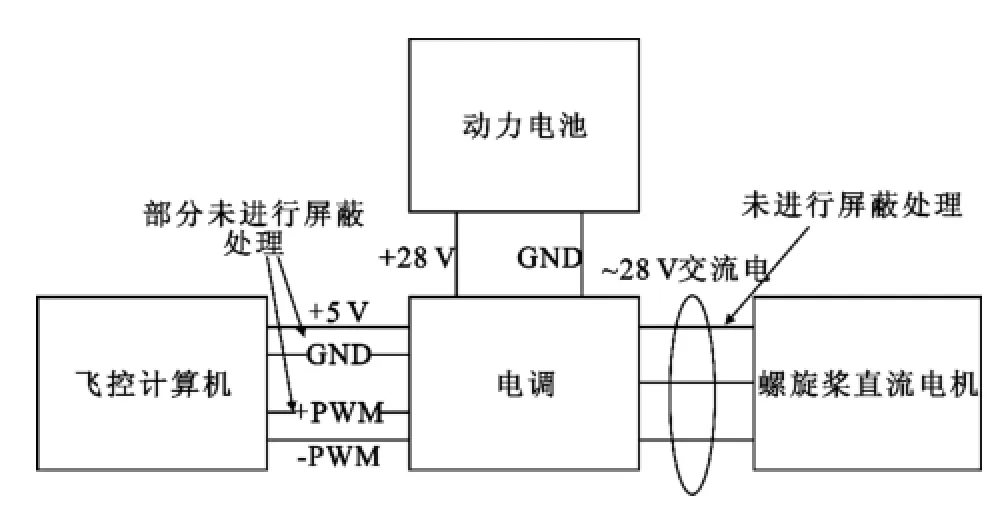
图7 螺旋桨直流电机电气连接Fig.7 Propeller DC motor electrical connection diagram
3 电磁整改措施
针对上述影响因素,采用以下措施解决:
无人机飞控计算机内50 MHz晶振的谐波在飞控计算机内来处理,即将晶振波型由方波改为正弦波。并保证内部PCB板地与飞控计算机外壳良好搭接,辅以外部屏蔽和接口滤波来解决。外部屏蔽处理包括:飞控计算机外壳采用腔体结构、口盖增加导电衬垫,侧面孔重新设计等以保证飞控计算机外壳良好的屏蔽性能;插头采用带有滤波功能的插头。
无人机飞控计算机与螺旋桨电机、各舵机的连接线(二条电源线和二条差分信号线)分组双绞且进行屏蔽,特别是要保证接头间屏蔽层的良好搭接。
无人机各舵机最好要有专门的屏蔽层,该屏蔽层与线缆的屏蔽层也要保持良好的搭接。
无人机螺旋桨电机输入电源线端口进行滤波处理,同时进行屏蔽处理,该屏蔽层与机架保持良好的搭接。
无人机飞控计算机与螺旋桨电机、各舵机的连接线的布线采用多点接地方式,确保在15厘米内能有一个有效的接地点。
上述接地、搭接及屏蔽设计的实施可以参考GJB 1210-91或参考文献[5]。
4 电磁整改效果验证
4.1 采用近场探头对部分措施进行验证
验证试验一:飞控计算机与舵机电机连接线进行屏蔽处理
从图8测试结果可知,用近场探头在飞控计算机与舵机电机连接线处分别测试无屏蔽层时和有屏蔽层时干扰辐射强度。对比结果可知,飞控计算机与舵机电机连接线进行屏蔽处理,可以将无人机平台电气系统对通信设备在200~400 MHz频率范围内的影响降低10~20 dB。
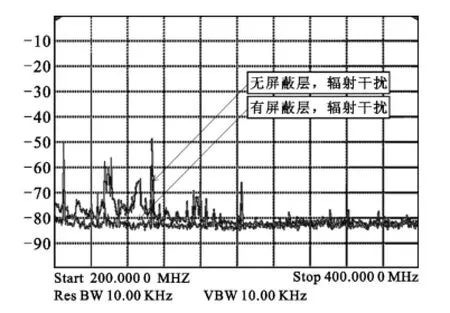
图8 有无屏蔽层飞控与舵机连线辐射干扰噪声对比Fig.8 Interference noise radiation comparison chart of the line with shielding layer or without shielding layer between flight control system and steering gear
验证试验二:对电调与螺旋桨电机连接线进行屏蔽处理(螺旋桨电机空载工作状态,供电电流约为10A)
从图9测试结果可知,用近场探头在电调与螺旋桨电机连接线处分别测试无屏蔽层时和有屏蔽层时干扰辐射强度。对比结果可知,飞在电调与螺旋桨电机连接线进行屏蔽处理,可以将无人机平台电气系统对通信设备在200~400 MHz频率范围内的影响降低5~10 dB。
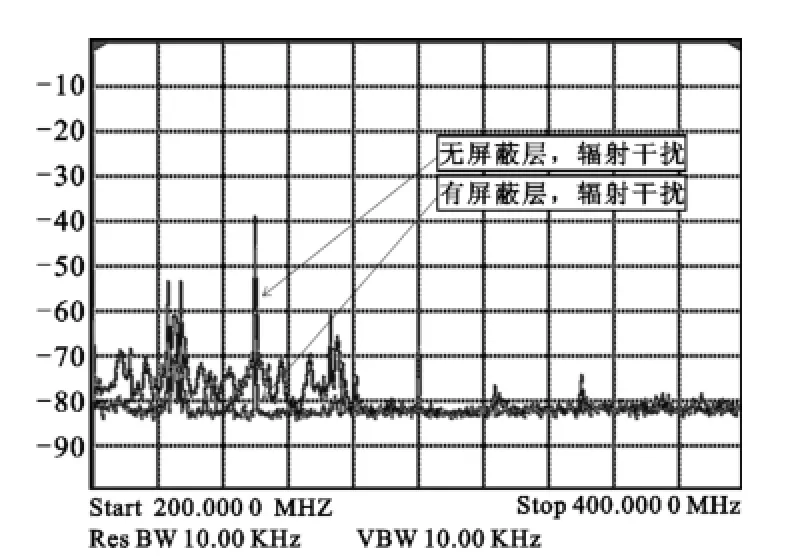
图9 有无屏蔽层电调与螺旋桨电机连线辐射干扰噪声对比Fig.9 Interference noise radiation comparison chart of the line with shielding layer or without shielding layer out of the line between the electrical adjuster and motor
4.2 在天线端口直接测量干扰信号方法来验证整改效果
验证试验三:各种措施均已完成时,在天线端口再一次测量干扰信号。
从图10测试结果可知,各种措施均完成后,无人机平台电气系统对通信设备的影响降低20~30 dB,背景噪声均低于-87 dBm。

图10 天线端口测量干扰噪声结果Fig.10 Measured interference results in the antenna port
4.3 等缩比拉距方法进一步验证整改效果
试验验证四:各种措施均已完成,当GPS天线在无人机机尾时,采用等缩比拉距方法进一步验证整改效果。
试验测试配置如图11所示。选择250 MHz、260 MHz、300 MHz、380 MHz四个频率点,并调节输出功率,记录在天线1端口接收到的目标信号功率,考察通信设备接收灵敏度,测试结果如表1,表明在四个测试频点上通信设备接收灵敏度都小于-87 dBm,满足通信设备使用要求。

图11 试验测试配置框Fig.11 Test configuration diagram

表1 试验记录表Table 1 Test record
5 结 语
本文从电磁兼容三要素(干扰源、耦合途径、敏感设备)出发,先用排除法判断出无人机平台电气系统影响机载通信设备是通过辐射耦合方式。然后用近场探头对辐射干扰源位置进行定位,探明飞控计算机、飞控计算机与螺旋桨电机、舵机的连接线均是强辐射源,结合电气系统的工作原理,分析出整个干扰过程机理:飞控计算机晶振谐波通过外壳及与外界的连接线辐射出250MHz强干扰信号,同时飞控计算机给电机和各舵机发送的PWM信号也通过各控制线辐射出宽频谱干扰信号,抬高整个频段底噪。
从解决电磁兼容问题三种手段(滤波、屏蔽和接地)入手,结合无人机平台特殊要求(重量、空间有限等),采取屏蔽与接地相结合的措施对相应部位进行处理。采用等缩比的验证方法,最终验证了整改措施的可行性,解决了无人机平台电气系统对机载通信设备影响的电磁兼容问题。
[1] 海涛,梁绍文.数字电话机电磁兼容设计[J].通信技术,1998(04):67-70.
HAI Tao,LIANG Shao-wen.EMC Design of the Digital Telephone[J].Communications Technology,1988(04): 67-70.
[2] 白同云.电磁兼容设计[M].北京:北京邮电大学出版社,2001:113-119.
BAI Tong-yun.The Electromagnetic Compatibility Design[M].Beijing:Beijing University of Posts and Telecommunications Press,2001:113-119.
[3] 陈南洋.外界电磁场对有线通信设备干扰的预警探测[J].信息安全与通信保密,2007(02):44-46.
CHEN Nan-yang.The External Magnetic Field on the Wired Communication Equipment Interference of Early Warning Detection[J].Information security and Communication Privacy,2007(02):44-46.
[4] 王红.电磁兼容在通信设备结构设计中的应用[J].通信技术,1996,94(03):36-40.
WANG Hong.Application of EMC in Structural Design of Communication Equipment,Communications Technology [J].1996(03):36-40.
[5] 马谢,沈冬远,王润洪.装备的电磁兼容管理、设计与验证经验[J].通信技术,2013(06):66-68.
MA Xie,SHEN Dong-yuan,WANG Run-hong.Equipment EMC Management,Design and Verification[J].Communications Technology,2013(06):66-68.
XIE Rui-yun(1978-),male,M.Sci., senior engineer,mainly working at network active defense and EMC.
毛得明(1982—),男,硕士,工程师,主要研究方向为设备和系统电磁兼容;
MAO De-ming(1982-),male,M.Sci.,engineer,mainly working at electromagnetic device and system EMC.
向 敏(1966—),本科,高级工程师,主要研究方向为应用电磁兼容技术。
XIANG Min(1966-),male,B.Sci.,senior engineer, mainly working at applied EMC technology.
EMC Between UAV Electrical System and Airborne Communication Device
Xie Rui-yun1,Mao De-ming1,Xiang Min2
(1.Southwest Communications Institute,Chengdu Sichuan 610041,China; 2.Chengdu Aircraft Industrial Corporation,Chengdu Sichuan 610092,China)
Interferentce on airborne communication system caused by electrical system of UAV platform is studied.Based on the study of electrical system of UAV platform and with channel simulation method,the interference path of electrical system of UAV platform is analyzed.On this basis,this paper proposes a fast and efficient interference source positioning method and corresponding remedial scheme.And in light of actual environment,a simple and effective EM retify-and-reform measure is also formulated.Experiment results show that the interference of the electrical system of UAV platform is reduced by more than 30dB.Receiving background noise of airborne communication device of UAV platform decreases from the previous-52 dBm to the present-87 dBm,and finally the requirement of wireless communication is satisfied.
EMC;UAV;airborne communication equipment
TN02
A
1002-0802(2014)10-1211-05
10.3969/j.issn.1002-0802.2014.10.021

谢瑞云(1978—),男,硕士,高级工程师,主要研究方向为网络主动防御和电磁兼容;
2014-07-05;
2014-09-22 Received date:2014-07-05;Revised date:2014-09-22