基于S函数的三相异步电动机软启动仿真
2014-02-09王景婷许伯强
王景婷,许伯强
(华北电力大学 电气与电子工程学院,河北 保定 0 71003)
基于S函数的三相异步电动机软启动仿真
王景婷,许伯强
(华北电力大学 电气与电子工程学院,河北 保定 0 71003)
为了探究在三相异步电机启动过程中采用软启动技术给启动过程带来的影响,根据异步电机的数学模型给出了3种三相异步电机软启动方式,分析了这几种方式的优缺点,并以Simulink中的S-函数为基础编写异步电机的数学模型和启动方案,并对3种启动方案进行了仿真。比较了在3种启动方式下各个物理量的变化情况,验证了软启动策略的有效性,即采用软启动技术可以优化电机的启动性能,同时可以看到S-函数极大扩展了Simulink的应用范围。
S-函数;三相异步电机;软启动
0 引言
交流异步电机结构简单、运行可靠、环境适应性强和拖动性能好,电机在启动开始时反电势为零,冲击电流很大,启动电流过大时,将使电机本身受到过大电磁力的冲击;频繁启动,绕组会过热,另外,由于启动应力较大,使得负载使用寿命降低,过大电流不仅在定子线圈和转子笼条上产生很大冲击力,破坏绕组绝缘和造成笼条断裂,引起电机故障[1]。为了解决电机启动时产生的大电流,需要对电机进行软启动来降低启动电流。传统的启动方式能较好地解决启动电流大的问题,但基本上都是有级调节来完成的。随着电力电子技术的发展,新兴的启动技术随之而来,更好地解决了这个问题,其中,恒压频比控制启动就是较好的方式之一。本文启动控制策略便是基于恒压频比控制的。Simulink中的S-函数具有很强的描述动态系统的能力,通过与Simulink中求解器的交互来实现对系统求解。因此,可以用S-函数建立异步电机的模型,并结合异步电机软启动的控制思想,对异步电机软启动过程仿真,进而验证所提出的软启动控制策略的正确性。本文即按这种思路分析了异步电机的软启动过程。S-函数通过与Simulink求解器的交互来实现对动态系统的描述,极大地扩展了Simulink的使用范围,使得对用数学方程式来描述的系统的仿真变得极为方便。
1 三相异步电机启动
1.1 异步电机启动过程的基本方程
在启动过程中,异步电机的转子速度是变化的,这时采用同步坐标系统比较方便[2]。根据异步电机在d,q,0坐标系下的基本方程和坐标变换公式即可求得异步电机在这种坐标系统中的基本关系式。由于转子对称、转子绕组短接,因此,可取udr=uqr=0并不计零轴分量,这样可得到所需的方程为:
式中:下标1代表定子量;下标2代表转子量;Ls为定子自电感;Lr为转子自电感;Lm为定、转子之间的互电感;R1和R2分别为定子和转子电阻;s为转差率,s= (ωs- ωr)/ωs,ωs,ωr分别为同步转速和转子角速度;udr,uqr分别为转子轴轴电压分量。
将式 (1)、 (2)改写成状态方程形式,则有:
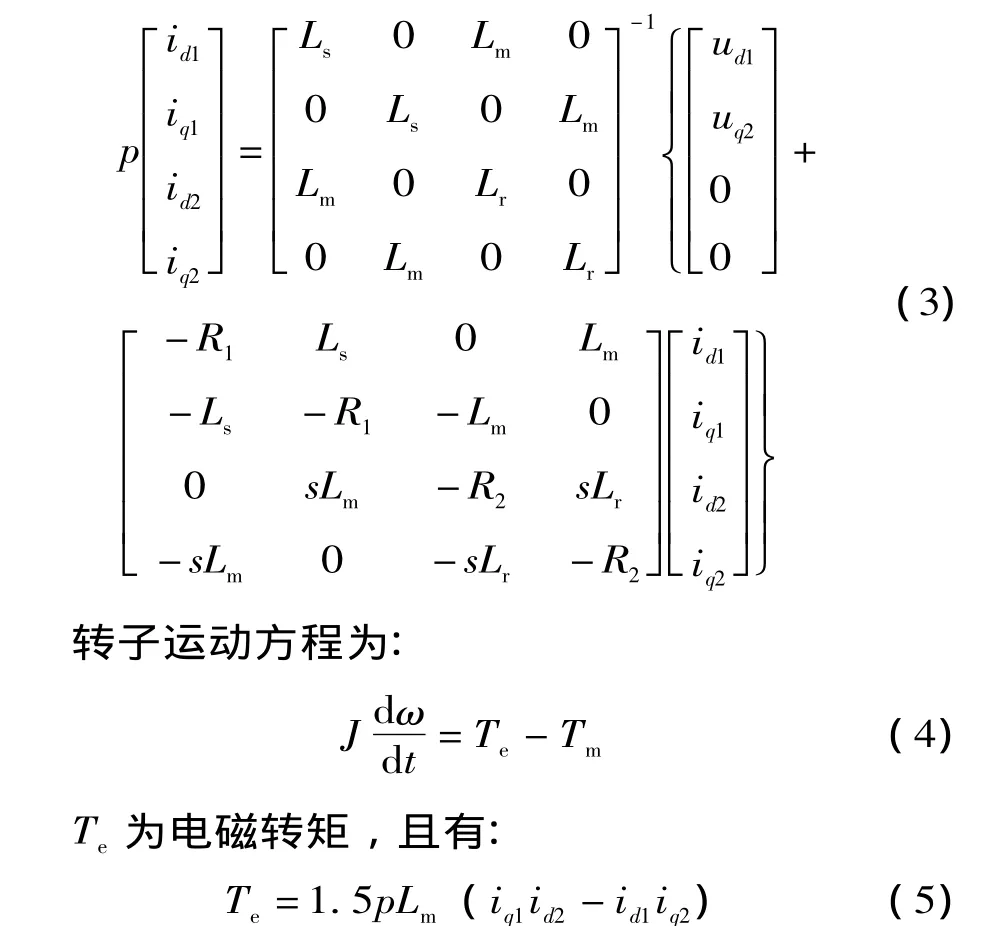
根据式 (3)、(4)及式 (5)即可研究异步电机在启动过程中的转矩和电流。式中:Tm为负载转矩;p为极对数。
1.2 异步电机启动方式的简介
传统软启动通常保持频率不变,通过调节电压来实现限制启动电流的。根据电压是否连续可调分为有级调速和无级调速[3]。
随着电力电子技术和微机控制技术的发展,依赖于变频器的控制技术迅速发展,出现了许多现代的启动方法逐步取代传统的降压起动设备。
所谓“软启动”,电压由零慢慢提升到额定电压,这样在启动过程中的电流,就由过去过载冲击电流不可控制变成为可控制。并且可根据需要调节启动电流的大小。电机启动的全过程都不存在冲击转矩,而是平滑的启动运行。这就是软启动。现有的诸多启动方式中,软启动的优点是控制方便、可反馈闭环控制、平滑性好等。对异步电机软启动进行仿真研究无疑具有重要意义[4]。
文献[5]中对异步电机直接转矩控制系统进行了仿真,文献 [6]分析了异步电机矢量控制变频调速系统的仿真,可以看出通过对异步电机仿真的研究能够对提出的控制方法作进一步的验证。
本文通过对3种启动方案仿真进行对比:
第一种方案:启动的负载为额定负载,供电电压为额定电压,频率为额定频率,即全压启动。
第二种方案:电压的频率在启动时低于额定频率,然后随着转速的上升,逐渐增加频率,在增加频率的过程中增加的步长为定值,在这里起始频率为20 Hz,频率增加的步长为0.012 7 Hz,确定频率的初始值以及频率的增加步长的依据是启动电流始终不超过额定电流的3倍。
第三种方案:对第二种试验方案 (2)进行改进,由于第二种方法中频率始终是增加的,为了启动电流不超过额定电流的3倍,步长被限定的很小。导致启动的速度减慢,为了提高启动的速度,应该增加步长,所以在第3种方法中步长分为正步长和负步长,这样可以增加步长,提高频率的上升速度。通过实时地计算定子电流的有效值,当没达到上限时采用正步长,当达到上限时采用负步长,并且为了迅速地使电流到达允许的范围之内,在这里负步长是正步长的两倍。试验中频率起始值为25 Hz,正步长为1 Hz,负步长为-2 Hz。
2 S-函数
S-函数是系统函数 (System Function)的简称,是指采用非图形化的方式 (即计算机语言),区别于Simulink的系统模块描述的一个功能块。S-函数能够接受来自Simulink求解器的相关信息,并对求解器发出的命令做出适当的响应,这种交互作用非常类似于Simulink系统模块与求解器的交互作用。一个结构体系完整的S-函数包含了描述动态系统所需的全部能力,所有其他的使用情况都是这个结构体系的特例。S-函数模块是整个Simulink动态系统的核心。S-函数是由一种特定的语法构成,用来描述并实现连续系统、离散系统以及符合系统等动态系统。S-函数提供了一种在Simulink模型中增加自制块的手段,可以使用MATLAB,C,C++,Ada,或Fortran语言来创建自己的块。按照下面一套简单的规则,可以在S-函数中实现自己的算法[7]。
2.1 Simulink块的数学关系
Simulink块包含一组输入、一组状态和一组输出。其中,输出时采样时间、输入和块状态的函数如图1所示。
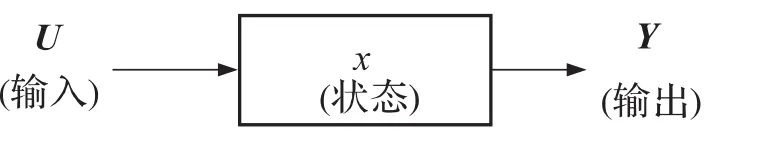
图1 S-函数输入、输出关系
下面的方程描述了输入、输出和状态之间的数学关系:
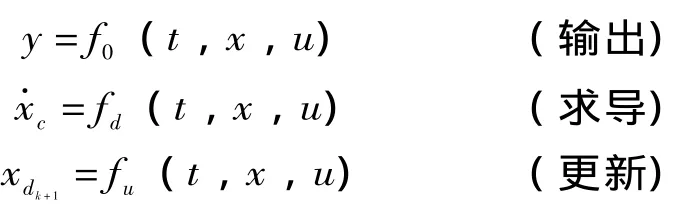
式中:x=xc+xd。
2.2 仿真过程
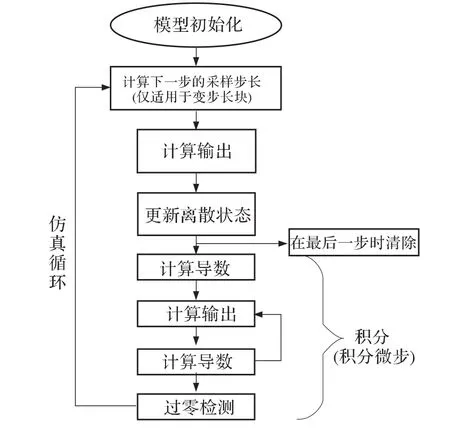
图2 S-函数流程图
Simulink模型的执行分几个阶段进行。如图2所示为一个仿真的步骤。首先进行的是初始化阶段,在此阶段Simulink将库块合并到模型中来,确定传送宽度、数据类型和采样时间,计算块参数,确定块的执行顺序以及分配内存。然后,Simulink进入到“仿真循环”,每次循环可以认为是一个“仿真步”。在每个仿真步期间,Simulink按照初始化阶段确定的块执行顺序依次执行模型中的每个块。对于每个块而言,Simulink调用函数来计算块在当前采样时间下的状态、导数和输出。如此反复,一直持续到仿真结束[8]。
3 仿真波形
本仿真采用的异步电机的仿真试验数据如下:
异步电动机容量Sn=2 200 VA;电压Un=380 V;频率f=50 Hz;定子电阻Rs=7.092 Ω;定子漏感Lls=0.038 79 H;归算到定子侧的转子电阻Rrp=9.318 4 Ω;归算到定子侧的转子漏感Llrp=0.038 79 H;互感Lm=0.776 319 H;转动惯量J=0.089 kg·m2;极对数p=2。
由图3可以看出第一种方案定子电流很大,采用频压比控制启动,起动电流明显减小,但启动时间增长,定步长启动时间最长,双向启动时间要小于定步长启动。

图3 定子A相电流
由图4可以看出直接启动转速最快到达稳定状态,第三种方案启动次之,定步长启动最慢。这是由于第二种方案为了使启动电流不超过额定电流的3倍,步长被限定的很小,导致启动速度变慢。
由图5~13可以看出3种启动方案最终都能达到稳定状态且最终状态一致,证明启动方案可行,但是,达到稳定状态的时间却不一样,第一种直接启动最快,第二种定步长启动最慢,第三种双向步长启动比定步长要快。
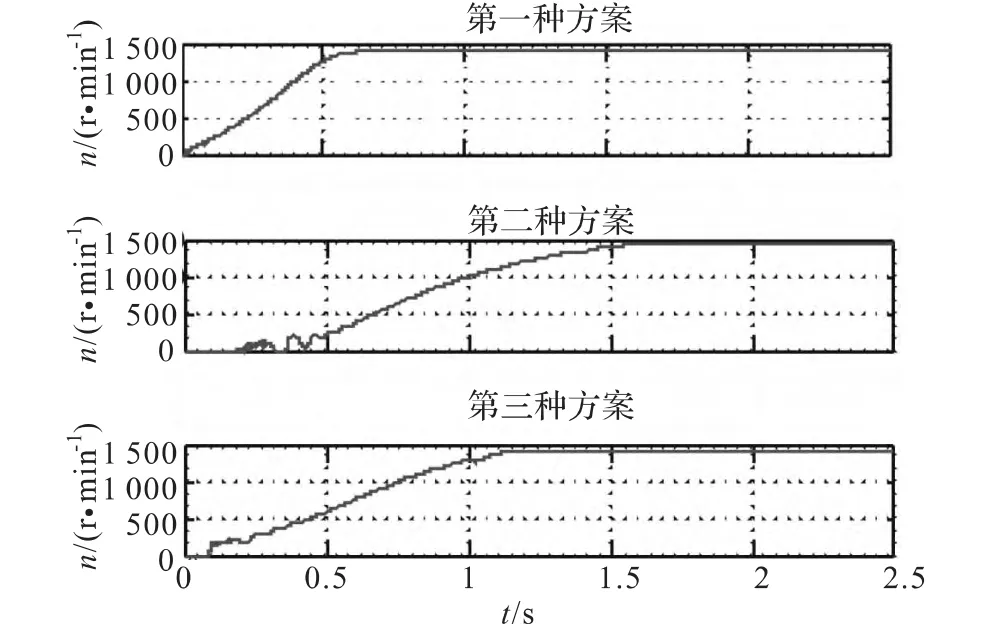
图4 转速变化曲线
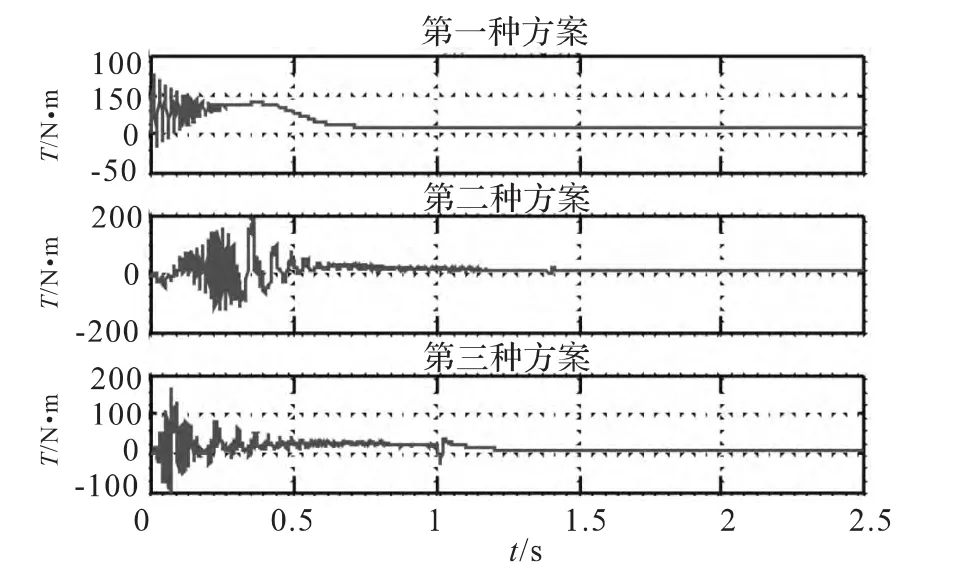
图5 转矩变化曲线
图6 定子d轴电流
图7 定子q轴电流
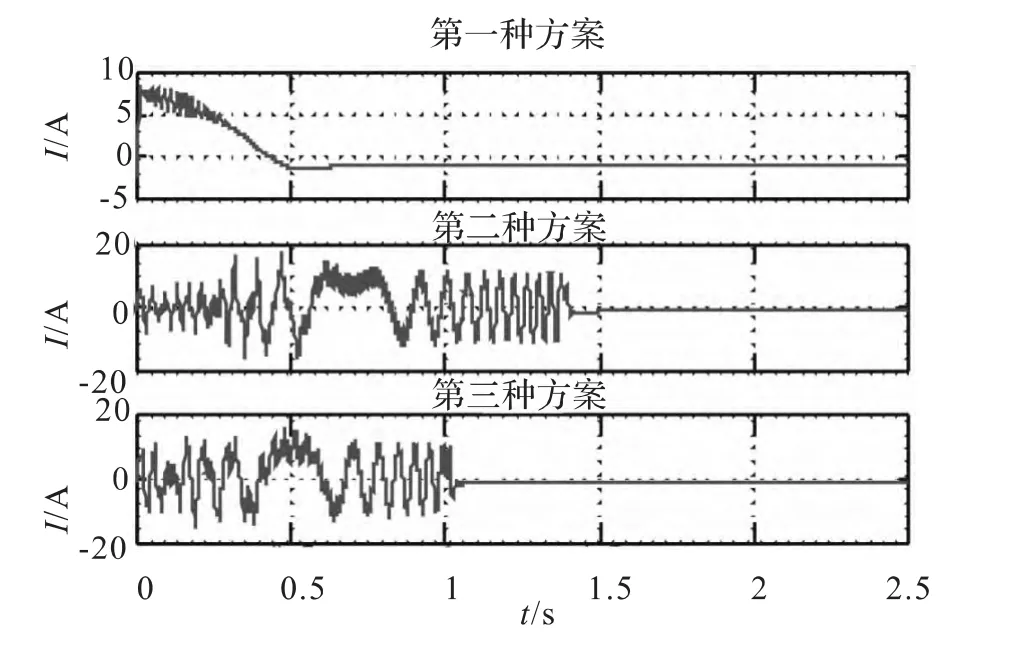
图8 转子d轴电流
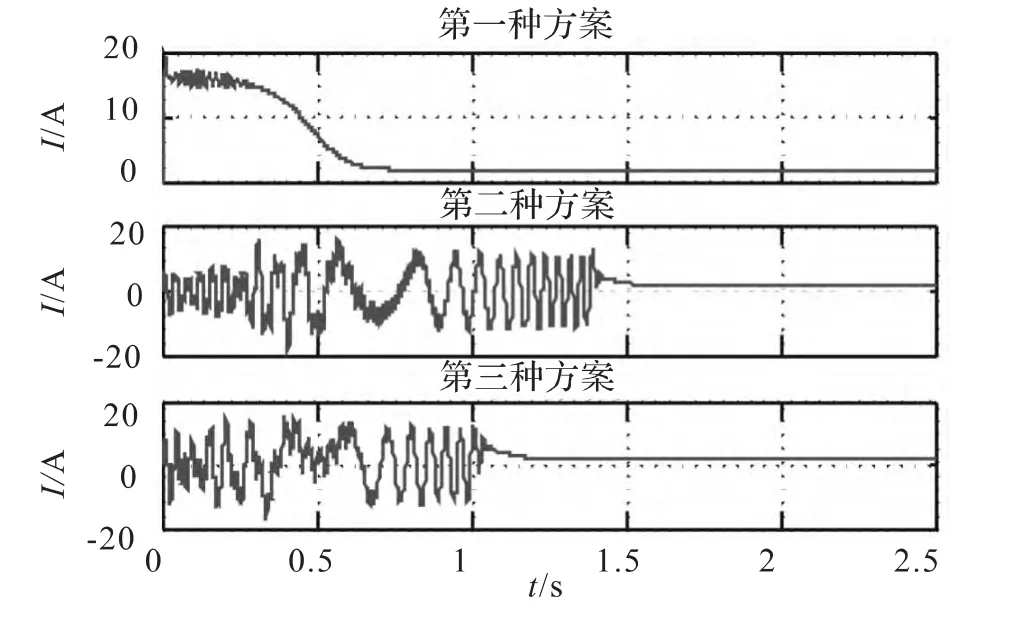
图9 转子q轴电流
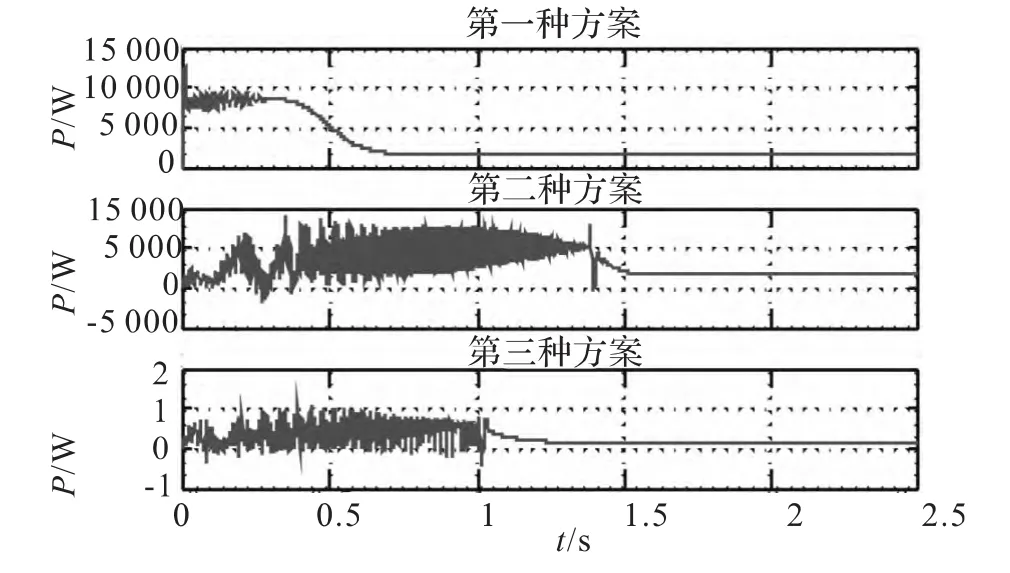
图10 输入的有功功率
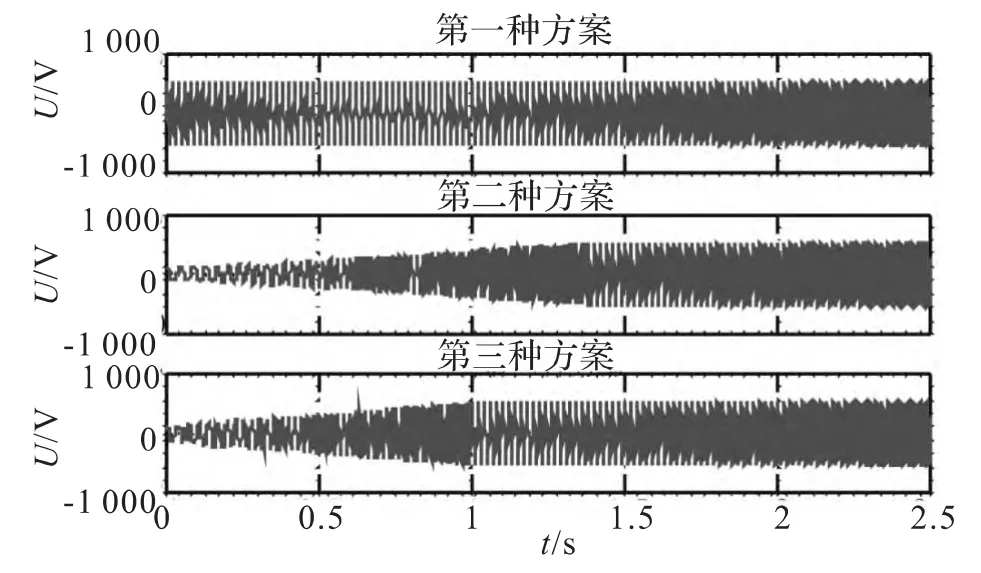
图11 定子电压变化曲线
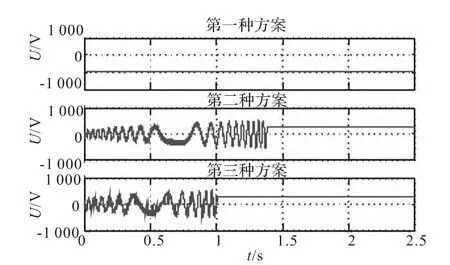
图12 定子电压d轴分量变化曲线
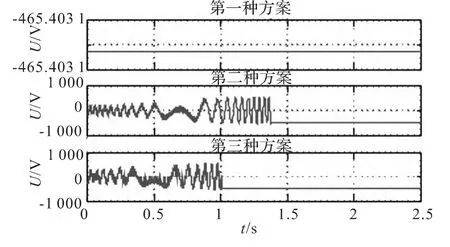
图13 定子电压q轴分量变化曲线
4 结论
采用直接全载启动时启动电流过大,对电机造成很大的损害;频率定步长启动时,虽然启动电流限制在安全的范围内,但是启动时间相对过长达到稳态大约需1.5 s;而采用双向步长启动时可以克服全载启动和定步长启动的缺点,可以使启动时间缩短到1 s,同时保证启动电流在安全范围之内。
[1]周俊.基于DSP的三相异步电机的智能软起动器 [D].杭州:浙江大学,2006.
[2]高景德,王祥珩,李发海.交流电机及其系统的分析[M].北京:清华大学出版社,1994.327-329.
[3]胡红明.异步电机软起动研究 [D].武汉:华中科技大学,2010.
[4]黄劭刚,黄华高,季国瑜.基于MATLAB的异步电机软起动过程的仿真 [J].计算机仿真,2003,20(7):101-102.
[5]张俊喜,张春喜.基于MATLAB/Simulink的异步电机直接转矩控制系统仿真 [J].电力科学与工程,2006,(2):59-62.
[6]张晓玲,许伯强.异步电机矢量控制变频调速系统的仿真研究 [J].电力科学与工程,2010,26(12):24-27.
[7]郑丽霞.MATLAB/Simulink机电一体化应用 [M].北京:机械工业出版社,2012.150-152.
[8]林飞,杜欣.电力电子应用技术的 MATLAB仿真[M].北京:中国电力出版社,2009.15-20.
Simulation of Soft Start-up of Asynchronous Machines Based on S-function
Wang Jingting,Xu Boqiang
(School of Electrical and Electronic Engineering,North China Electric Power University,Baoding 071003,China)
To explore the effect of adopting soft start-up technology in the start-up process during a three-phase induction motor start-up process,according to the mathematical model of the induction motor,three soft start-up modes of three-phase induction motor are given.The advantages and disadvantages of these modes are then analyzed.Based on S-function in Simulink,the mathematical model and start-up solutions of the induction motor are given.The proposed solutions are simulated,and the parameter changes in three start-up methods are compared.The effectiveness of the presented soft start-up strategy is verified.The results show that using soft-start technology can optimize the startup performance of the motor,while the S-function greatly expands the applications range of the Simulink.
S-functions;three-phase asynchronous motor;soft start-up
TM343
A
10.3969/j.issn.1672-0792.2014.04.004
2013-10-14。
国家自然科学基金资助项目 (51277077)。
王景婷 (1987-),男,硕士研究生,研究方向为风力发电机故障机理分析与检测方法研究,E-mail:fxwq110@163.com。