LSINS/GPS与自动驾驶仪的动态仿真实验构建
2014-02-09江秀红段富海曲萍萍
江秀红,段富海,金 霞,曲萍萍
(1.大连理工大学传感测控技术研究所,辽宁大连116024;2.沈阳航空航天大学电子信息工程学院,辽宁沈阳110136)
0 引 言
随着环形激光陀螺仪的快速发展,激光捷联惯导成为首先得到实际应用的捷联式惯导。由LSINS/GPS构成的组合式导航系统在飞机上的应用也越来越广泛,不同型号的产品也开始装备不同类型的飞机[1-6]。为验证LSINS/GPS与自动驾驶仪交联接口的正确性以及故障处理能力,检测系统自动导航控制飞机的动态品质和航迹保持精度,检测侧风等干扰对系统航迹保持的影响,验证激光惯导提供给自动驾驶仪的姿态信号、导航操纵信号的品质及其与平台惯导的一致性[7,8],在装备前必须对LSINS/GPS与自动驾驶仪系统进行交联测试。
鉴于飞行实验费用过大,最初的测试往往无法进行飞行器的搭载实验,因此国内外均采用在实验室中搭建半物理系统进行测试[9,10]。而仿真平台的合理搭建对实验的可行性、验证的充分性和试验结果的可信度将产生直接影响。
1 动态仿真平台框架
LSINS/GPS与自动驾驶仪的动态仿真平台框架如图1所示。图中LSINS包括激光惯性导航部件、惯导控制显示器、惯导状态选择器等,它根据导航任务要求给自动驾驶仪发出导航指令。自动驾驶仪包括数字式驾驶仪计算机、伺服放大器、驾驶仪操纵显示器、3个电动操纵舵机和三轴速率陀螺组等,它除执行对飞机的姿态稳定功能外,还执行导航指令,完成自动导航功能。
1.1 飞机数字仿真机
飞机数字仿真机为Matlab+dSPACE集成数字仿真平台。用于装载飞机运动数学方程及指令模型,记录数据,按实验飞行状态及其相应的气动参数设定的不同飞行状态、扰动信号、导航指令,实时解算驾驶仪输出的舵面控制信号和飞机运动参数,通过数字输出端口来控制三轴电动飞行模拟转台的运动。D/A输出端口为自动驾驶仪提供侧滑角信号,A/D输入端口接收LSINS输出的导航操纵信号。用ARINC429数据总线为LSINS/GPS组合导航系统提供飞机的机体速度、加速度等信号,同时接收、记录组合导航系统送出的飞机经度、纬度等信号。飞机运动模型采用小扰动线性化运动方程,包括由4个耦合(风轴系)的方程和3个非耦合的方程组成的纵向线性化运动方程组、由4个耦合(体轴系)的方程和3个非耦合的方程组成的横航向线性化运动方程组。
1.2 三轴电动飞行模拟转台
用于模拟飞机在空中的角运动,转台上安装了三轴速率陀螺组、激光惯性导航部件等,转台的角运动激励由飞机数字仿真机提供。
1.3 负载模拟器
用于模拟飞机各操纵舵面的动载荷,实现向驾驶仪各舵机加载。该负载模拟器上还设有检测各舵机转动位置的电位计,将舵机转动位置信号反馈到数字仿真机内飞机仿真器中的飞机运动方程,以形成飞机——自动导航大系统的闭环控制。
1.4 动静压模拟器
用于提供气源和飞机动静压信号。由数字仿真机计算并送给动静压模拟器动静压电压信号,动静压模拟器将电压信号转换为动静压压力送给大气机。
除此之外,系统还包括提供所需的高度差、空速和升降速度等信号的大气数据计算机。用于自动驾驶仪系统各部件的交联和测试,并提供电源的自动驾驶仪全套试验器,以及激光惯性导航部件测试设备。限于篇幅,图1中,自动驾驶仪全套实验器、大气数据计算机测试设备和激光惯性导航部件测试设备未画出。
2 实验步骤及试验环境设定
2.1 实验步骤
(1)检测自动驾驶仪按激光惯导给定的“操纵信号”操纵和稳定飞机的性能:飞行过程中,在自动驾驶仪接通情况下,由惯导设置典型航线,输出操纵信号,然后将自动驾驶仪的工作模态选为“惯导导航”状态,验证自动驾驶仪控制飞机按惯导操纵信号平飞和转弯的能力。
(2)检测激光惯导在导航模式下功能的正确性,包括惯导180°导航功能、惯导导航即时改航功能、自动导航与驾驶仪操纵两种工作模式切换功能等。
(3)通过多航路点长航线飞行,来检测自动驾驶仪执行远距自动领航任务的能力:由惯导设置多航路点长航线,在沿所选航线飞行过程中适时给飞机施加±5m/s或10m/s的侧风干扰,验证自动驾驶仪按“惯导导航”飞行计划自动控制飞机飞行时,在各航路点上自动转弯切入应飞航迹的动态品质,到达新的应飞航迹后的航迹保持能力,以及应飞航迹上受侧风干扰后恢复航迹的能力。
2.2 实验环境设定
仿真中使用的飞机运动模型,以小扰动线性化运动方程为主,全量运动方程为补充的方式,即在采用小扰动线性化运动方程进行导航系统动态仿真调试,在确定好参数后,保持导航参数不变,采用飞机全量方程进行导航系统动态仿真验证,以弥补小扰动方程动态仿真实验的不足,考核飞机纵、侧向的交联影响。
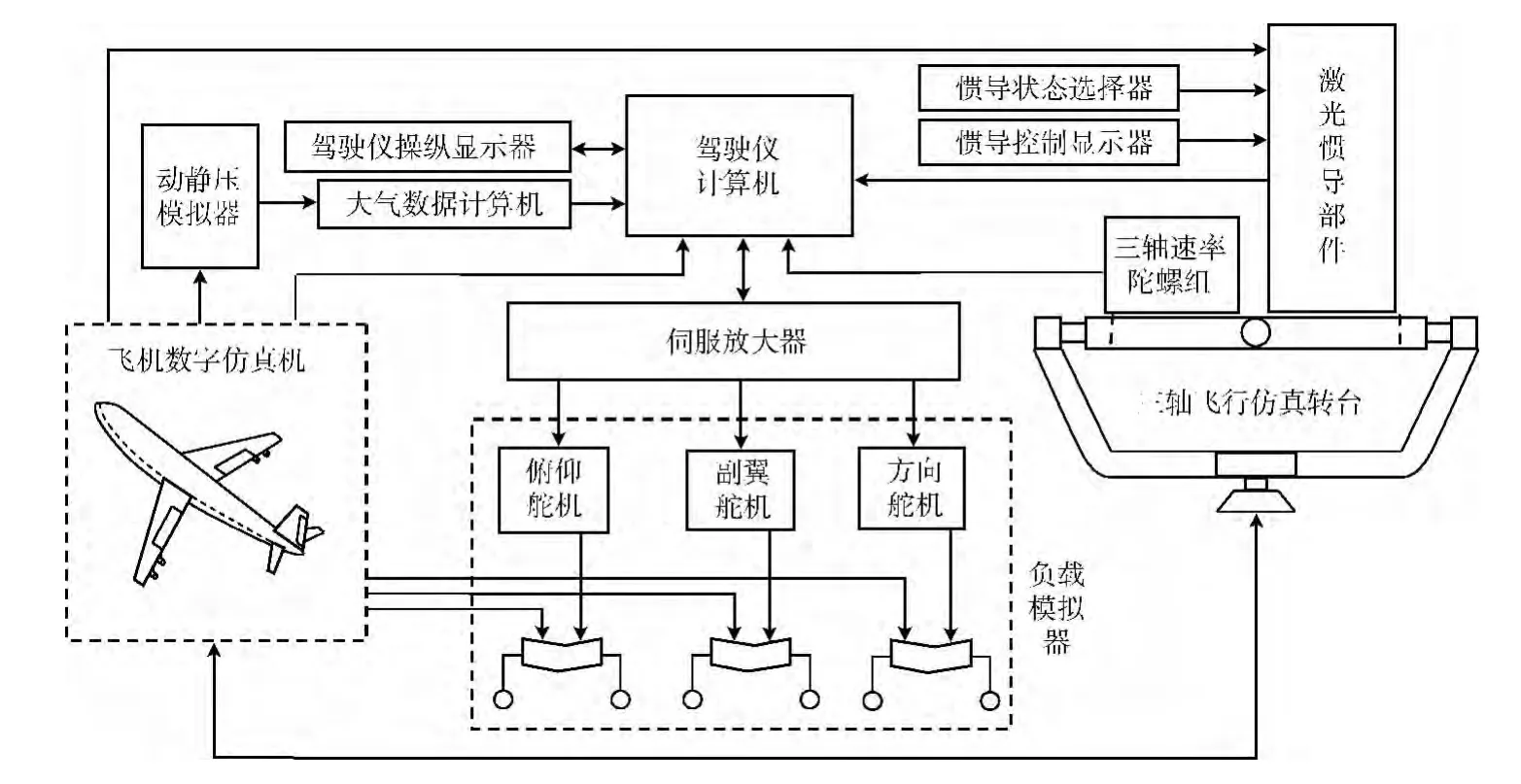
图1 导航系统动态仿真原理框架
不同飞行状态下进行实验,在驾驶仪限定的工作剖面内,合理选择导航试验用飞行状态,包括设计状态和验证状态。设计状态选取多组,以典型的巡航高度、巡航速度状态为主。验证状态的包括不同速度、不同高度各种组合,并进行极限使用或边界条件下的仿真验证。
3 实验方法和结果
下面对基本导航、改航、工作模式切换、长航线飞行等项目的试验方法和试验结果作一介绍。
3.1 基本导航测试实验
选择具有典型控制作用的6个航路点00→(58.43km)→01→(102.26km)→02→(116.87km)→03→(131.67km)→04→(89.07km)→0,其中00(E:103.84200,N:36.04990)、01(E:103.84200,N:36.57480)、02(E:103.07940,N:36.57480)、03(E:101.95100,N:36.04990)、04(E:103.07940,N:36.68650)、05(E:103.07940,N:37.08020)。按给定的实验用飞行状态,进行不同飞行状态下的惯导导航飞行实验。
飞行中每个飞行状态采用压点转弯和切线转弯各飞一次。飞行时在航线上共加两次干扰(平直飞行段加起始滚转角γ0=+3°×20s或-3°×20s干扰、侧风β0=+3°×2s或-3°×2s干扰)进行实验,以全面检测惯导导航的动特性。
通过对航迹图的统计和分析,不论是压点转弯过程,还是切线转弯过程,飞机都能平滑地进入和退出转弯,并切入航线,满足动态仿真实验的要求。
(1)在飞行状态(H=6000m,V=860km/h)下,在90°采用压点转弯过程中,侧滑角最大值βmax=0.8°,滚转角最大值γmax=21°,滚转角速度最大值ωxmax=4°/s,航向角最大值ψmax=110°,建立航向角最大值的时间Tmax=115s,γ角建立时间按±10统计为11s。
(2)飞行状态(H=3000m,V=775km/h)下,在175°采用切线转弯过程中,侧滑角最大值βmax=2.5°,滚转角最大值γmax=24°,滚转角速度最大值ωxmax=3°/s,航向角最大值ψmax=120°,建立航向角最大值的时间Tmax=220s,γ角建立时间按±10统计为11.5s。
飞机按预定航线飞行时,受到滚转角干扰和侧风干扰后,惯导自动导航系统能够控制飞机返回到预定的航线上,满足动态仿真实验要求。
(1)在飞行状态(H=6000m,V=860km/h)下,在00~01平直飞行段加γ0=3°×20s的干扰时,侧滑角最大值βmax=0.07°、滚转角最大值γmax=3.7°、滚转角速度最大值ωxmax=1.5°/s。
(2)在飞行状态(H=9000m,V=712km/h)下,在01~02平直飞行段加侧风β0=3°×2s的干扰时,侧滑角最大值βmax=3deg、滚转角最大值γmax=3°、滚转角速度最大值ωxmax=3.3°/s。
3.2 惯导改航功能测试实验
选择具有典型控制作用的8个航路点00~07,如图2所示。采用飞行计划00→01→02→03→04→05,06→07,按飞行状态(H=6000m,V=690km/h)进行惯导改航飞行,飞行中相继进行如下功能检测:
(1)即时位置改航:按图2所示飞行计划开始飞行实验后,在00→01航段飞行中,进行即时位置改航,跳过01点,飞至02点。
(2)选择航路点改航:在01→02航段飞行中,进行航路点改航,跳过03点,飞向04点。
(3)航段改航:在04→05航段飞行中,进行航段改航,自动切入06→07航段。
(4)选择航线改航:按图2所示飞行计划开始飞行实验后,在01→02航段飞行中,进行选择航线改航,自动切入00→08→06→07航线飞行。
(5)实现转弯方式切换功能,06点由压点转弯方式改用切线转弯方式,07点由切线方式转弯改用压点转弯方式。
(6)由图2可见,不论采用压点转弯方式,还是切线转弯方式,惯导导航改航功能均正确。
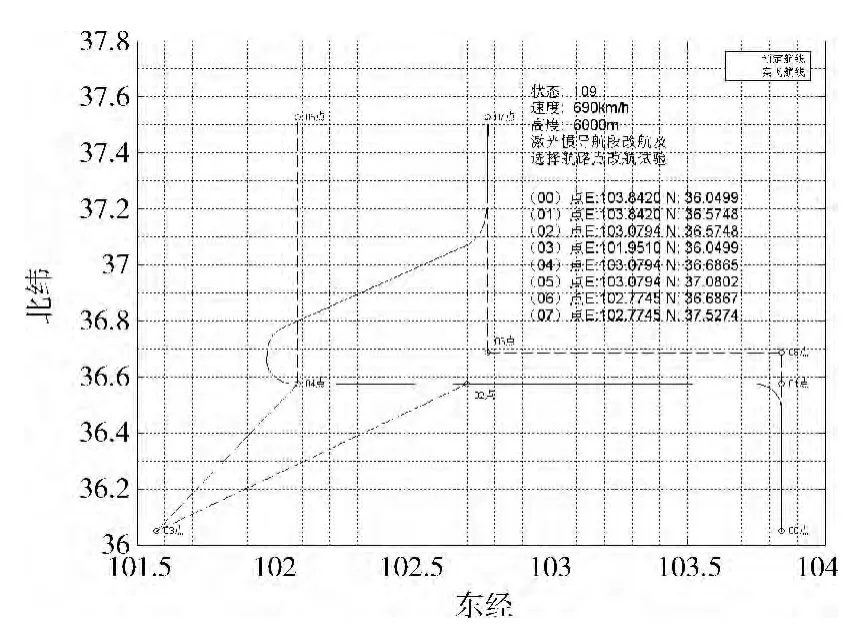
图2 改航功能测试飞行计划和仿真航迹
3.3 自动导航与驾驶仪操纵模式切换实验
惯导执行如图3所示的直线飞行计划00→01→02。其中航路点00(E:103.842 0°,N:36.049 9°)、01(E:103.842 0°,N:36.574 8°)、02(E:103.079 4°,N:36.574 8°),飞机选用飞行状态(H=6000m,V=690km/h),进行惯导导航飞行,飞行中按如下两种情况进行工作模式切换测试:
(1)实验开始时为自动导航,在00→01航段转入驾驶仪人工转弯操纵,飞机在右偏航120°的方向飞行,当右偏离航线10km左右,接通自动导航返回航线;再转入驾驶仪人工操纵,飞机在左偏航120°的方向飞行,当左偏离航线10km左右,接通自动导航返回航线。
(2)实验开始时为驾驶仪人工操纵右转弯偏离航线10km,接通自动导航应返回航线;再转入驾驶仪人工操纵左转弯偏离航线10km,最后接通自动导航应返回航线。
由图3可见自动导航与驾驶仪操纵两种工作模式切换功能正确。
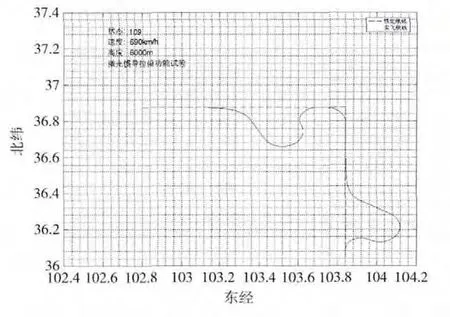
图3 自动导航与驾驶仪操纵工作模式切换试验航迹
3.4 长航线飞行实验
按图4执行飞行计划,选用飞行状态(H=6000m,V=690km/h),进行长时间的惯导自动导航飞行。驾驶仪分别在航路点01、02、03、04、05、06以压点转弯方式,航路点07、08、09以切线转弯方式飞行。中途于任选平直飞行航段分别加入β0=±3°×1s和γ0=±3°×1s的侧风和起始姿态扰动进行实验,以检测自动驾驶仪按惯导导航飞行计划自动控制飞机飞行时,在各航路点上自动转弯切入应飞航迹的动态品质,到达新的应飞航迹后的航迹保持能力以及应飞航迹上受扰后恢复航迹的能力。飞机飞回00后,2分钟后停飞,看过了00后,飞机是否沿09→00方向航向保持飞行。
由图4可见,惯导完成了规定的飞行计划,实验结果满足动态仿真试验的要求。

4 结束语
本文首先构建了LSINS/GPS与自动驾驶仪的动态仿真实验平台,对平台的主要组成设备进行了介绍,包括飞机数字仿真机、三轴电动飞行模拟转台、负载模拟器、动静压模拟器等。以此平台为基础,详细给出了基本导航、改航、自动导航与驾驶仪操纵模式切换、长航线飞行等项目的测试内容、方法、步骤以及结果。
经仿真后的LSINS/GPS组合导航系统按一些仿真航线进行了飞行实验,其结果与仿真结果基本相同,表明导航系统仿真中所采用的建模方法和各种导航设备的仿真方法基本是正确的,仿真结果可信。
[1]XIAO Zhixiang,LIU Jian.Numerical investigation of massively separated flows past RLG using advanced DES approaches[C]//33rd AIAA Aero acoustics Conference.Colorado Springs:AIAA Press,2012.
[2]YUAN Baolun,RAO Guyin.A new calibration technique for RLG IMU[J].Journal of Chinese Inertial Technology,2007,15(1):31-34(in Chinese).[袁保伦,饶谷音.一种新的激光陀螺惯性测量组合标定方法[J].中国惯性技术学报,2007,15(1):31-34.]
[3]LIU Zhiping,HAN Zonghu.The technical situation and development tendency of foreign optical strap down inertial navigation system[J].Aerospace Control,2012,30(5):94-99(in Chinese).[刘智平,韩宗虎.国外光学捷联惯导系统的技术现状和捷联惯导发展趋势[J].航天控制,2012,30(5):94-99.]
[4]ZHOU Qi,QIN Yongyuan.Precision calibration techniques research for laser strap-down inertial measurement unit[J].Measurement&Control Technology,2008,27(9):95-98(in Chinese).[周琪,秦永元.激光捷联惯性组件精确标定方法研究[J].测控技术,2008,27(9):95-98.]
[5]Wang Kang,Liu Li.GPS/SINS integrated navigation system hardware-in-the-loop simulation with GPS receiver[C]//AIAA Modeling and Simulation Technologies Conference and Exhibit.South Carolina:AIAA Press,2007.
[6]Matthew McCue,Daniel J.GPS autopilot without rate sensors for UAV aircraft[C]//AIAA Atmospheric Flight Mechanics Conference and Exhibit.Colorado:AIAA Press,2006.
[7]DUAN Fuhai,YANG Yong.Software development of autopilot signal sources simulation equipment[J].Computer Engineering,2010,36(5):269-271(in Chinese).[段富海,杨勇.自动驾驶仪信号源仿真设备的软件开发[J].计算机工程,2010,36(5):269-271.]
[8]LIU Zhong,JIA Xiaohong.Novel back-stepping design for blended aero and reaction-jet missile autopilot[J].Journal of Systems Engineering and Electronics,2008,19(1):148-153.
[9]YU Xiang,LI Yan.Display system design for semi-physical simulation system of a helicopter[J].Computer Simulation,2007,24(1):48-50(in Chinese).[余翔,李俨.某型直升机半物理仿真视景系统设计[J].计算机仿真,2007,24(1):48-50.]
[10]YU Bo,ZHU Jihong.Research on large scale hardware inclosed-loop simulation of flight control system[J].Aerospace Control,2010,28(2):51-62(in Chinese).[余波,朱纪洪.飞行控制系统大闭环半物理仿真研究[J].航天控制,2010,28(2):51-62.]
