基于积分变换算法矢量控制仿真研究
2014-01-27林安平孙成琪余培文
林安平 孙成琪 余培文
(广东海洋大学航海学院,广东 湛江 524025)
基于积分变换算法矢量控制仿真研究
林安平 孙成琪 余培文
(广东海洋大学航海学院,广东 湛江 524025)
本文分析了传统PI控制易产生较大超调量、消除稳态偏差所需时间较长的原因,提出了一种积分变换算法,并将这种算法应用于矢量控制系统。仿真结果表明:这种积分变换算法能有效地减小超调量,加快调节器消除稳态偏差的过程,具有较强的抗负载扰动能力。
积分变换;矢量控制;超调量;Simulink
在感应电机矢量控制系统中,采用传统PI调节器作为转速调节器,由于积分系数固定不变,易产生较大超调量,调节时间较长。采用模糊控制或神经网络控制[1-2],可以有效的减小超调量和调节时间,但算法相对复杂。针对以上控制算法的不足,本文提出了一种相对简单的积分变换算法,并采用矢量控制系统Simlink仿真验证了这种算法。
1 积分变换算法建模
1.1 积分变换算法原理
传统PI调节器积分系数固定不变,当输入偏差较大时开始积分,积分器迅速达到饱和状态,产生较大超调量;直到反馈信号大于给定值时,积分器才开始退出饱和,由于此时偏差相对较小,退出饱和过程所需时间较长,因此,需要较长时间才能消除稳态偏差。
为了克服传统PI控制的不足,可以采用积分变换算法。积分变换算法根据输入偏差的大小对积分器的输入进行变换,变换算法如下:①当输入偏差较大时,使积分器的输入为零,避免积分器过早达到饱和;②当输入偏差中等时,使积分器输入较小的常数,开始积分以消除稳态偏差;③当输入偏差较小时,采用变换函数对偏差进行放大,以加快消除稳态偏差,缩短调节时间。
1.2 积分变换算法数学模型
积分变换算法根据模糊控制理论,结合实际情况,将输入偏差分为负大(NB)、负中(NM)、零(ZE)、正中(PM)、正大(PB)五个模糊集合。积分变换函数如下:

式中,ey的符号与输入偏差e的符号一致。
1.3 积分变换算法的Simulink实现
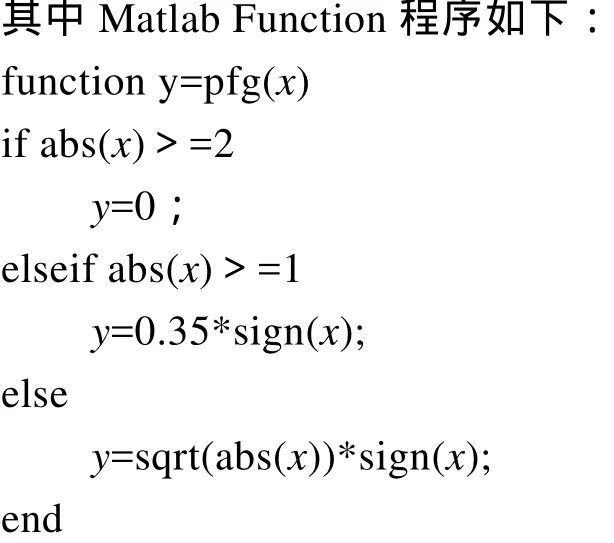
由于积分变换算法实际上是一个分段函数,可以将变换算法分解成两部分,一部分求出变换后输出量 ey的绝对值|ey|,另一部分求出 ey的符号。在Simulink仿真中,可以采用Matlab Function来实现此功能。积分变换子系统仿真模型如图1所示。

图1 积分变换子系统
2 积分变换算法应用仿真
2.1 几种典型负载建模
异步电机所带的典型负载主要有一下几种:①摩擦性负载:负载大小为常数,方向与电机旋转方向相反。当电机转速为零时,负载为零;②惯性负载:负载大小与电机加速度成正比,其数学表达式为③风机负载:负载大小与电机转速的平方成正比,方向与电机旋转方向相反,
根据以上几种典型负载模型[3],可建立一个复合负载仿真子系统,如图2所示。

图2 复合负载子系统
2.2 矢量控制系统仿真
根据感应电机数学模型,在Simulink环境下,使用子系统可以建立感应电机仿真模型[4]。然后根据矢量控制理论,采用基于转子磁场定向[5],可以实现对转子磁链分量和电机转矩分量的完全解耦控制,达到很好的动态性能。矢量控制系统仿真如图3所示。

图3 矢量控制仿真系统
2.3 仿真结果分析
电机参数为:LS=0.545H;LR=0.542H;LM=0.510H;RS=4.1Ω;RR=2.5Ω;J=0.04kg·m2;极对数nP=2;仿真采用ODE23S算法,仿真时间为0.9s。为了比较传统PI控制和积分变换两种控制算法的控制效果,先采用传统带限幅PI控制,然后再采用积分变换控制。两种控制算法,均经过多次试验,选取最优参数。在 t=0s时刻,转速给定信号ω*=150rad/s;在t=0.3s时刻,转速给定信号突变为ω*=30rad/s;在 t=0.6s时刻,加入幅值为 f=50N·m的摩擦性负载。仿真结果如图4所示。

图4 转速曲线一
从图4可以看出,采用两种调节器,超调量都不大,转速反馈可以较好地跟踪转速给定的变化。为了便于比较两种算法的控制效果,将图4进行局部放大,得到图5、图6和图7。
在图4—图7中,实线表示采用积分变换控制所得到的转速曲线,虚线表示采用传统PI控制得到的转速曲线。从图5可以看出,在t=0.066s时刻,转速反馈第一次达到给定值,采用积分变换算法时,转速超调量较小,并且很快使转速达到给定值150rad/s;而采用传统PI,由于积分器退出饱和过程较长,转速从151rad/s缓慢趋近给定值,消除稳态偏差所需时间较长。在图6中,采用积分变换控制的超调量较小,并且能很快消除稳态偏差;图7为加入突变负载后的转速曲线,从图中可以看出,采用积分变换算法在突加摩擦性负载时,转速动态降落略小于传统PI控制,并且能较快地使转速ω恢复到给定值,而采用传统PI控制,则需要较长时间才能使转速ω 恢复到给定值。由此可见,采用积分变换控制克服负载扰动影响的性能要优于传统 PI控制算法。

图5 转速曲线二
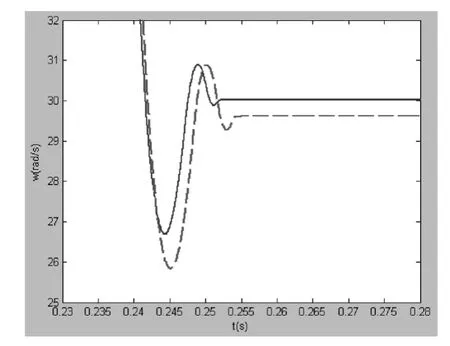
图6 转速曲线三

图7 转速曲线四
3 结论
采用积分变换控制,克服了传统PI控制过早进入饱和状态,以及退出饱和过程所需时间较长的局限性,能有效地减小超调量和调节时间,增强控制系统的抗干扰能力。采用积分变换控制,要根据具体控制系统来选择分段和变换函数,如何对分段和变换函数进行优化,需要一步研究。
[1] 罗兵. 智能控制技术[M]. 北京:清华大学出版社,2011.
[2] 周博,邓福军. 模糊控制在异步电机直接转矩控制系统中的应用[J]. 变频器世界, 2011(4): 63-66.
[3] 吴志红,毛明平,陶生桂. 带变惯量负载的感应电机模糊控制策略研究[J]. 电气传动, 2004(2): 8-11.
[4] 黎英. 基于 Matlab/Simulink的异步电机建模与仿真[J]. 电气传动自动化, 1999, 21(3): 35-37.
[5] 陈伯时. 电力拖动自动控制系统[M]. 北京:机械工业出版社, 1999.
The Study of Vector Control Simulation Based on Integral Transformation Algorithm
Lin Anping Sun Chengqi Yu Peiwen
(Navigation College, Guangdong Ocean University, Zhanjiang, Guangdong 524025)
This paper analyzed the reason of traditional PI controller tends to cause larger overshoot, and need longer time to eliminate the steady state error, then proposed a kind of integral transformation algorithm, furthermore applied this algorithm to vector control system. The simulation results show this integral transformation algorithm can reduce the overshoot effectively, speed up the eliminating steady-state error process, and with higher anti-jamming performance to counteract load disturbances.
integral transformation; vector control; overshoot; simulink
林安平(1982-),男,湖南株洲人,讲师,硕士,主要从事交流变频调速仿真和智能控制算法研究。
