相控阵雷达在线幅相校正*
2014-01-26纪斌,杨勇
纪 斌,杨 勇
(中国西南电子技术研究所,成都 610036)
相控阵雷达在线幅相校正*
纪 斌**,杨 勇
(中国西南电子技术研究所,成都 610036)
TR组件有源通道会随环境条件的变化引起雷达回波幅度和相位的变化,使得相控阵天线波束的指向精度下降、副瓣电平抬高,导致雷达系统在探测、成像、跟踪时失效。为此,通过对相控阵天线产生幅相误差原因的分析,提出了采用远场最优方向图和近场平均矢量法相结合的算法,对相控阵雷达进行非实时在线幅相校正,从而提高相控阵天线的幅相一致性,保证雷达系统正常工作。暗室试验和外场试验验证了算法的正确性和可实现性。
相控阵雷达;幅相校正;最优方向图;平均矢量法
1 引言
由于相控阵雷达具有波束快速捷变、多波束形成、空间功率分配可控和低副瓣等优点,能实现对多个目标快速扫描和跟踪,而且近几年来国内TR芯片技术的飞速发展和成本的迅速下降,使相控阵雷达受到了越来越多的重视和发展。但是,由于相控阵雷达采用多个天线单元空间合成的方式实现波束的发射和接收,每个天线的幅相不一致性以及TR温度和外部环境变化,都会引起发射和接收波束的偏差,影响雷达目标识别和跟踪精度,严重时会导致任务失败,因此多通道幅度相位的监测与校准是相控阵系统正常工作的前提。
常用的方法是在实验室测试每个TR组件时,测出其自身的幅度、相位误差,然后补偿到波控算法中,进行一次性修正。但是现在大功率TR组件发热量很大,外部环境温度和内部信道参数变化也很大,在实验室得出的补偿参数不能很好地满足使用需求。为此,本文分析了相控阵天线指向误差的构成,提出了一种非实时的在线校正方法来减小测量误差,使相控阵雷达利用工作间隙进行校正后能正常工作。
2 相控阵雷达误差分析和在线校正原理
相控阵雷达发射和接收信号是阵列中所有天线单元辐射电磁波的矢量合成,因此,引起相控阵雷达回波误差的因素包括各个单元的幅度误差、相位误差、单元的定位误差和单元失效误差。
单元的定位误差是指安装时天线单元的位置会偏离理论值,导致波束指向偏离理论值,造成波束指向误差。单元失效误差是指在使用过程中,单元因各种原因造成失效,使得波束指向偏离理论值,造成波束指向误差。由于这些误差值不随外部环境的变化而改变,因此都可以通过前期测量和计算,进行一次性补偿。而幅度误差和相位误差具有很大的随机性和环境温度变化性,会对相控阵雷达的波束指向和天线增益产生较大影响,因此必须对相控阵雷达进行定时的幅相校正,才能满足现在高精度雷达对目标的识别和跟踪。
相控阵雷达校准的功能在于补偿各通道发射/接收通道信号之间幅度和相位的不一致性,若能做到每次探测时对发射和接收通道做一次检测,就能得到更能反映当时雷达状态的补偿值。相控阵雷达在线校正原理为:在每次使用前,通过雷达设备自带的耦合天线发射信号对设备的TR组件单元和信道单元通道间一致性进行测试,雷达信号处理机把接收到的校正信号通过平均矢量法和FFT校正法,计算得到当前实时的幅相值,与前期保存在雷达中的初始值进行比较,从而得到相控阵雷达随时间和温度变化产生的误差值,进而进行必要的补偿,这样就能解决相控阵雷达幅相误差随环境变化的问题。相控阵雷达在线校正的硬件框图如图1所示,关键在于雷达系统设计中需要考虑校准通道和校准天线的设计和使用。
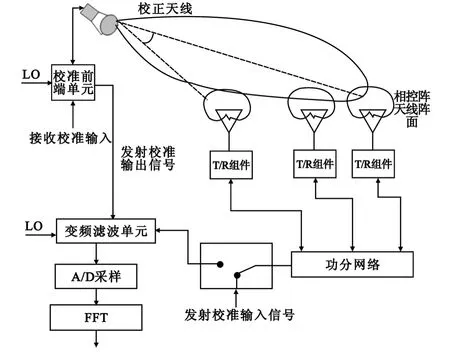
图1 相控阵雷达在线校准框图Fig.1 Diagram of online calibration for prased array radar
3 幅相校正流程及算法
根据相控阵雷达的组成和天线产生误差的原因,设计了整个幅相校正工作流程,如图2所示。
相控阵雷达的幅相校正需要整个系统,包括天线、TR组件、信道、信号处理和主控的相互配合,校正流程分为三个步骤:
(1)首先是在暗室环境下,通过远场最优方向图,测得和存储相控阵天线的远场发射幅相数据A1和接收幅相数据A2;
(2)然后通过雷达整机的测试天线和终端处理计算并储存近场发射幅相数据B1和接收幅相数据B2;
(3)最后把雷达整机挪到外场测试实时工作时的近场发射幅相数据C1和接收幅相数据C2,计算得到准确的发射和接收幅相数据。
3.1 远场天线图测量
在暗室中,主控计算机通过随机布相法,给被测相控阵雷达的波控单元产生上万个接收和发射的幅度、相位码值,并通过标准天线逐一测试被测天线的方向图,然后从中分别找出接收和发射幅度、相位最好两幅,则为最优方向图。记录下这两幅图的幅度和相位码值,分别记为A1和A2,存储到被测雷达中。这个步骤的目的是测试出每个单元天线由于幅度和相位的不一致性和单元定位差异引起的幅相误差的补偿值。
3.2 近场幅相校正测量
近场幅相校准是通过信号处理机的配合,使用平均矢量法,计算出幅相数据B1和B2,用于后续外场环境下进行幅相校正的计算基准,具体近场幅相校正算法流程如图3所示。
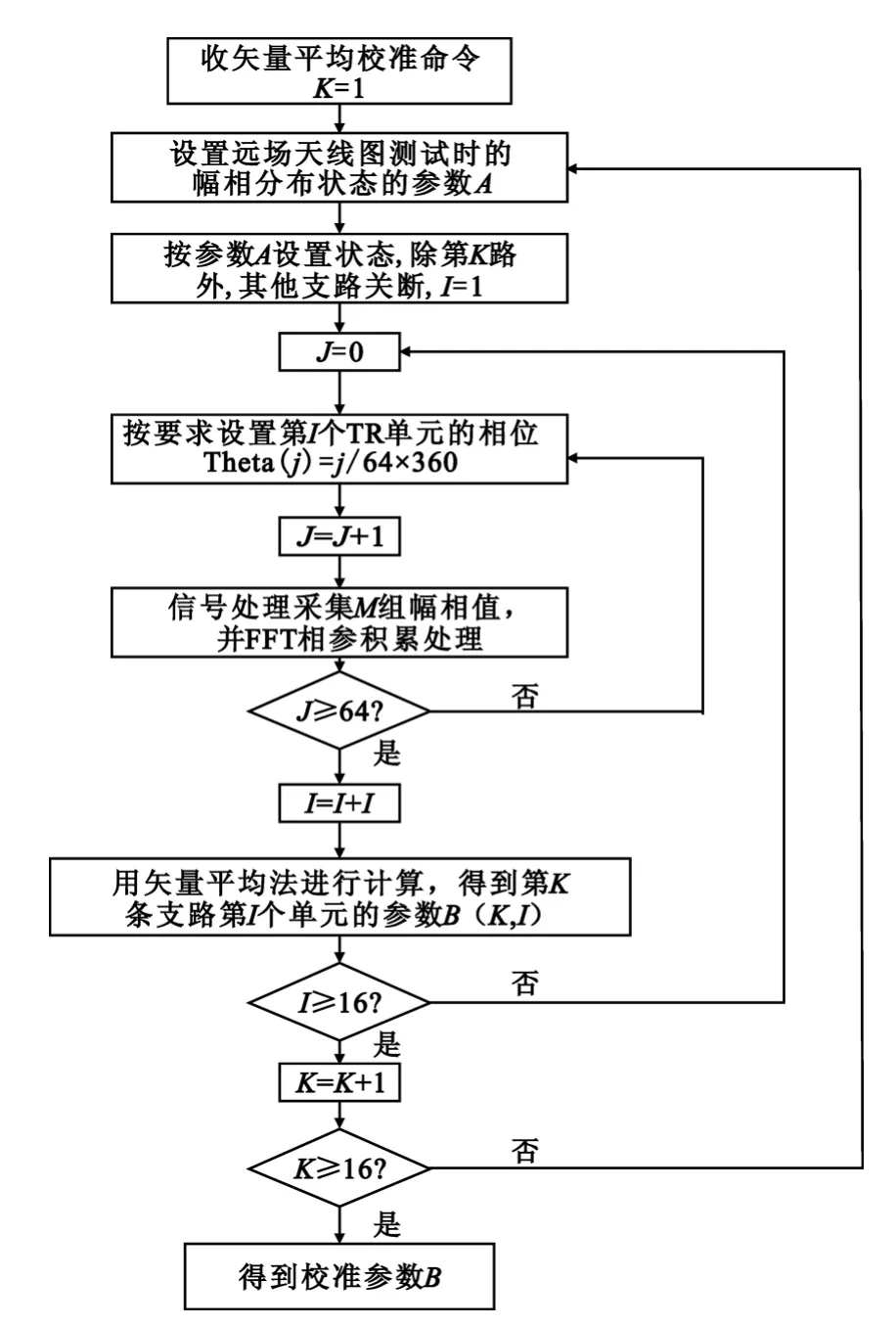
图3 近场幅相校正算法流程Fig.3 Near- field measurement method of gain and phase calibration flow
近场测试总的思路是屏蔽TR组件其他支路的耦合影响,一次只对其中一路的某个TR,通过平均矢量法求得幅度和相位值,最后组合成整个天线的幅度和相位码。流程中使用到了FFT相参积累,算法为:信号处理采集在接收模式下采集M组幅相值(M=8 192)A=ai,i=1,2,…,M,利用下式进行FFT变换:
3.3 外场实时近场校正
4 幅相校正算法试验验证
在未进行幅相校正前,在暗室中对相控阵雷达天线进行了一次指标测试,如图4所示,可以发现天线的副瓣电平过高,并且不对称,而其波束指向精度很差,最大到4°,严重影响了天线的性能。
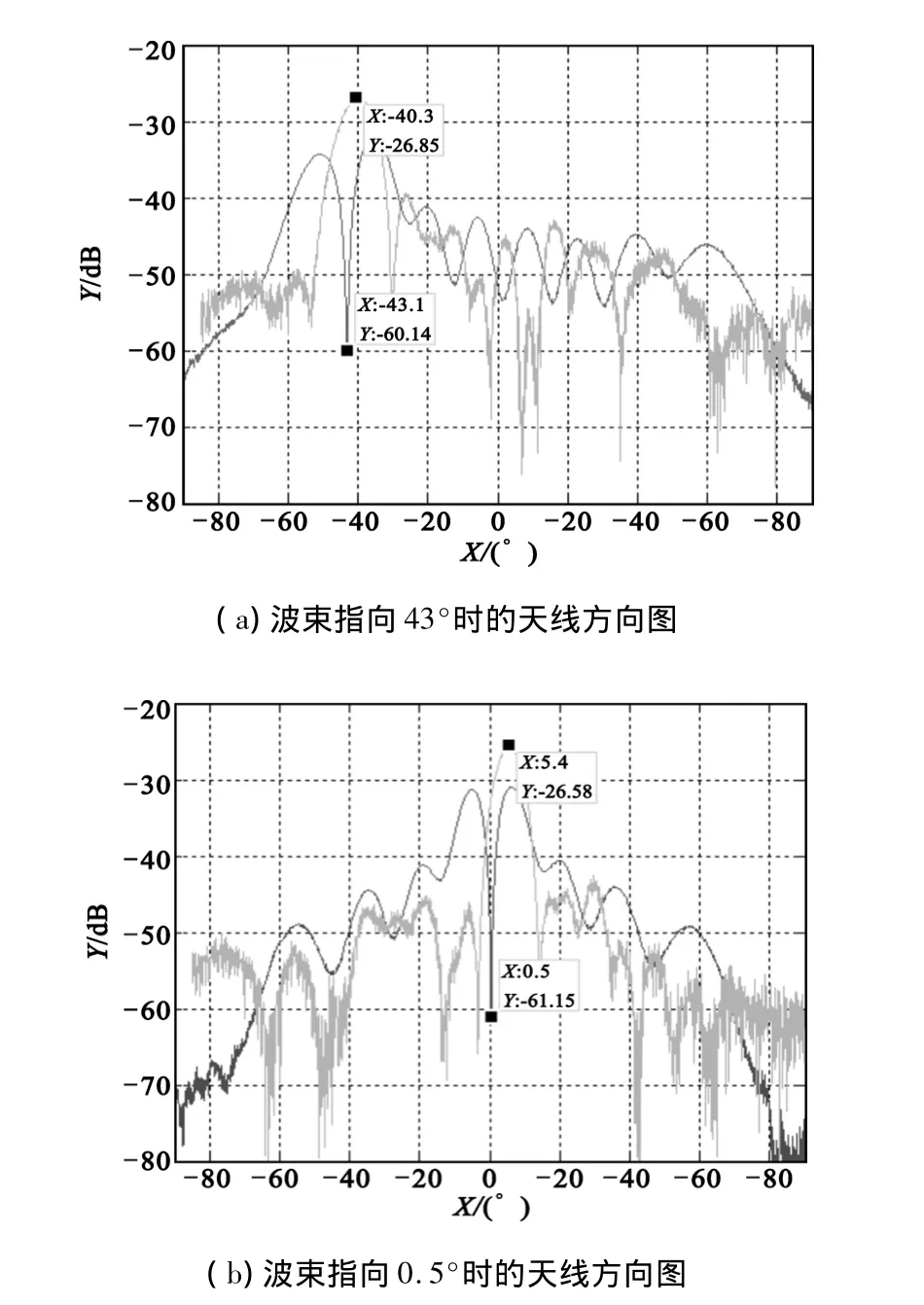
图4 校正前的不同指向的方向图Fig.4 Antenna's directional patterns before calibration
通过幅相校正后,对幅相码值进行了一次比较,如图5所示,可以看出幅度和相位码值发生了一定的变化。同时在相同的发射和接收功率、波束指向等条件下,测试的雷达天线指标如图6所示,可见天线的指向精度大大提高,减小到了0.3°以内。
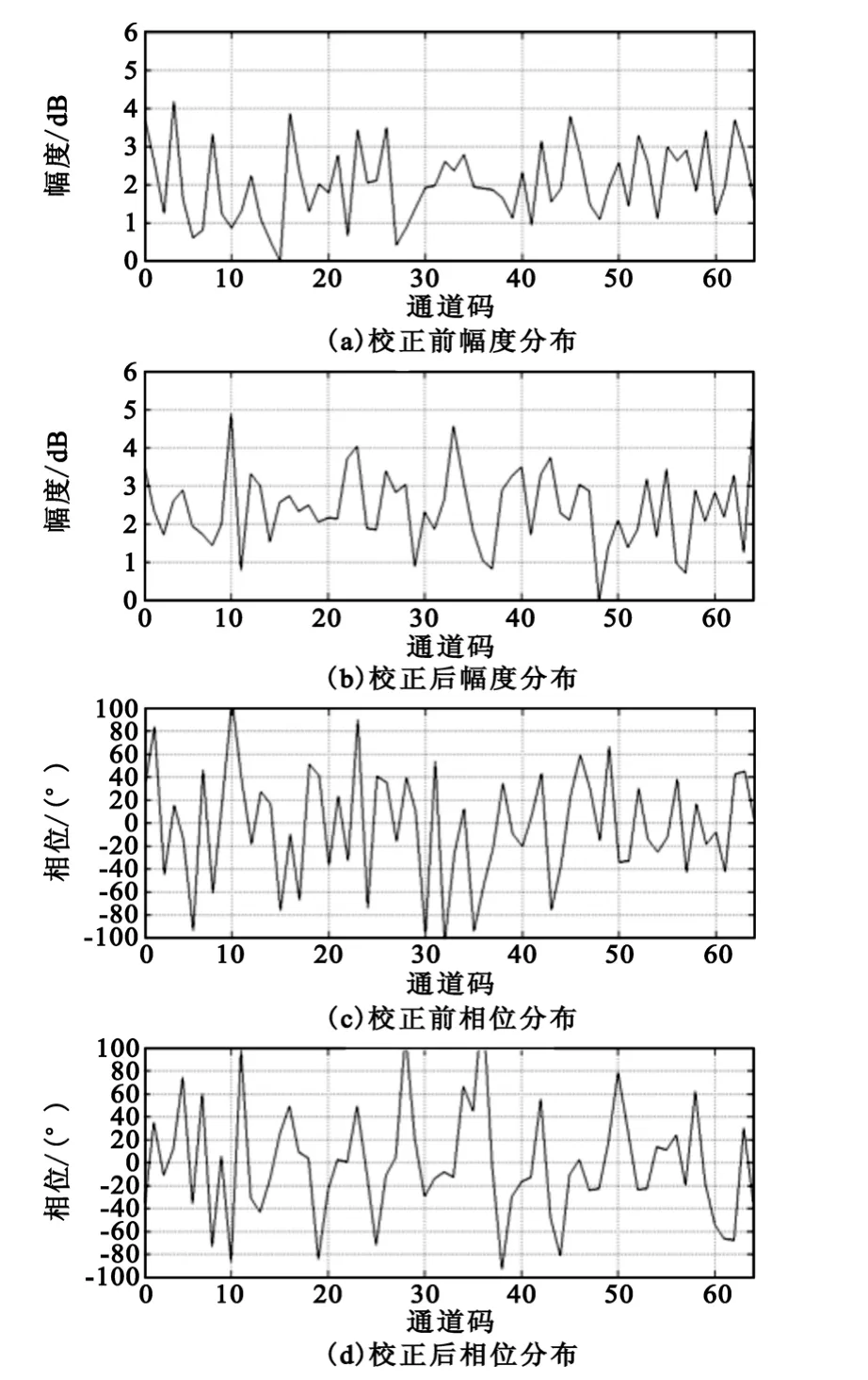
图5 校正前后的幅度相位分布Fig.5 Amplitude and phase distribution before calibration
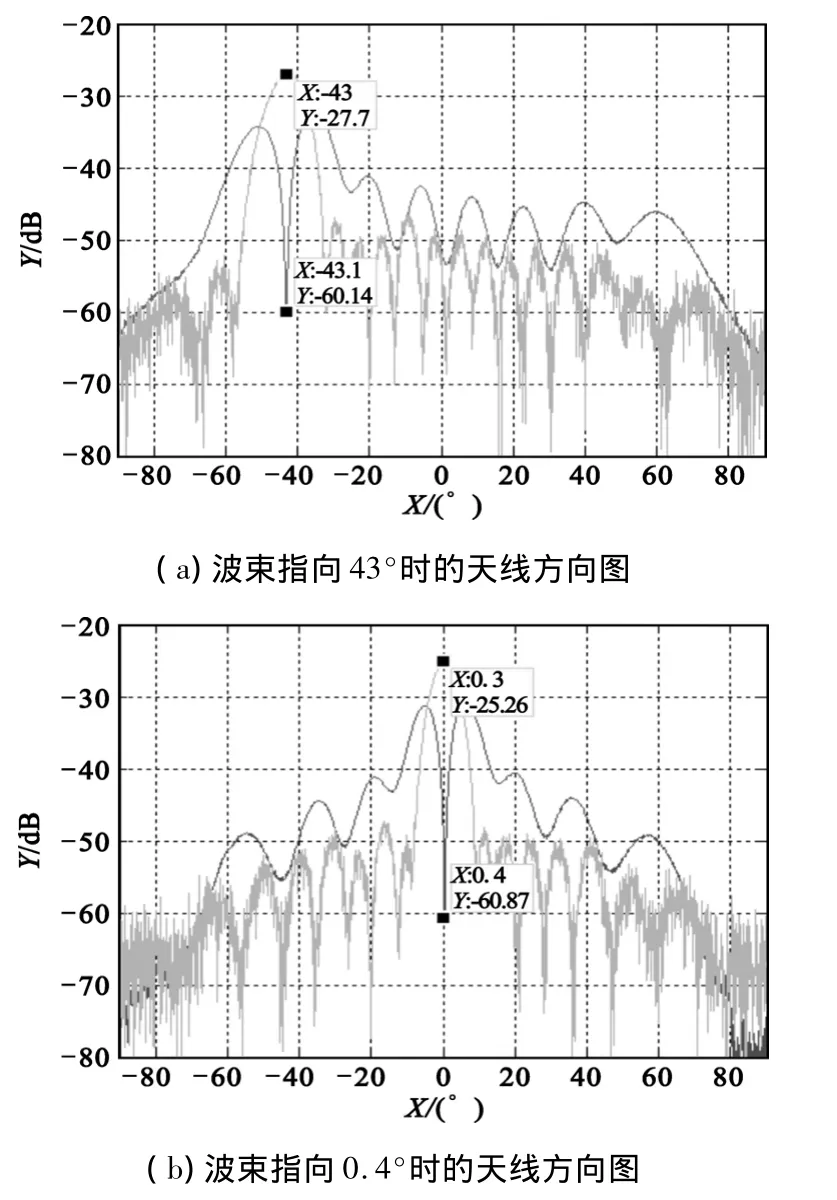
图6 校正后的不同指向的方向图Fig.6 Antenna's directional patterns after calibration
5 结论
采用上述在线校正算法,可以“随时随地”对雷达设备进行幅相校正,而不需要拆下相控阵天线,在暗室中反复测试,大大简化了校正复杂度。本算法还可以在不同环境下对天线幅度相位进行测试和补偿,提高了补偿的精度。通过试验验证,波束指向精度由原来的0.5°左右提升为了0.1°左右,副瓣电平降低了1~2 dB(法相方向),波束扫描到不同方向的增益平坦性也有所改善,提高了相控阵雷达的测角精度,为后端信号处理成像、识别和跟踪提供了有效的保证。
相控阵雷达在线幅相校正还需要考虑到系统的各项设计参数,如TR组件数量、接收机增益、TR发射功率、AD采样频率、校正信号耦合系数等。同时,由于不同状态下校正信号的幅度有较大的动态变化,小信号时的信噪比较差,影响幅相校正精度,因此,后期校正信号的设计考虑用相参积累的方法提高接收信号信噪比,进一步改善幅相校正效果。
[1]胡卫东,卢建斌.相控阵雷达资源管理的理论与方法[M].北京:国防工业出版社,2010:25-42.
HU Wei- dong,LU Jian - bin.The theory of Phased Array radar resource manage[M].Beijing:Publishing House of national defence Industry,2010:25 - 42.(in Chinese)
[2] 朱国富,黄晓涛.雷达系统设计Matlab仿真[M].北京:电子工业出版社,2009:228-270.
ZHU Guo-fu,HUANG Xiao-tao.Matlab simulations for radar system design[M].Beijing:Publishing House of E-lectronics Industry,2009:228 -270.(in Chinese)
[3] 罗群,朱和平.相控阵天线手册[M].北京:电子工业出版社,2008:278-295.
LUO Qun,ZHU He - ping.Phased array antenna handbook[M].Beijing:Publishing House of Electronics Industry,2008:278 -295.(in Chinese)
[4]严盟,廖桂生.阵列天线在近场条件下的幅相校正和阵元位置估计[J].雷达科学与技术,2005,3(6):383 -385.
YAN Meng,LIAO Gui- sheng.A Method for Calibrating the Arrays Gain and Phase Errors andEstimating Location in Near Field Sources[J].Radar Science and Technology,2005,3(6):383 -385.(in Chinese)
[5] 阎鲁滨.相控阵天线幅相校正的简单方法[J].航天器工程,2006,15(4):43 -45.
YAN Lu-bin.A simple method of phased array antenna calibration[J].Spacecraft Engineering,2005,15(4):43-45.(in Chinese)
Online Gain and Phase Calibration for Phased Array Radar
JI Bin,YANG Yong
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
Because the radar echo's amplitude and phase will be changed when the temperature of TR module channel rises,the phased array antenna beam pointing accuracy will descend and side - lobe level will drive up,resulting in the failure when the radar system begins to detect,imaging and track.Through analyzing the reason causing amplitude - phase error,this paper introduces an algorithm which combines farfield measurement method of optimized radiation pattern with near-field measurement method of average vector algorithm to calibrate the radar non-realtimely and improve the phased array antenna's amplitudephase consistency.The correction and feasibility of this algorithm have been proved by the measurement in anechoic chamber and outfield test.
phased array radar;gain and phase calibration;optimized radiation pattern;average vector algorithm
TN958.92
A
1001-893X(2014)05-0621-05
10.3969/j.issn.1001 -893x.2014.05.018
纪斌,杨勇.相控阵雷达在线幅相校正[J].电讯技术,2014,54(5):621 -625.[JI Bin,YANG Yong.Online Gain and Phase Calibration for Phased Array Radar[J].Telecommunication Engineering,2014,54(5):621 -625.]
2013-11-28;
2014-03-24
date:2013-11-28;Revised date:2014-03-24
**
ziyoudianzi1981@sina.com Corresponding author:ziyoudianzi1981@sina.com

纪 斌(1981—),男,四川广汉人,2007年于电子科技大学获硕士学位,现为工程师,主要从事雷达系统研发工作;
JI Bin was born in Guanghan,Sichuan Province,in 1981.He received the M.S.degree from University of Electronic Science and Technology of China in 2007.He is now an engineer.Hisresearch concerns radar system R&D.
Email:ziyoudianzi1981@sina.com
杨 勇(1978—),男,辽宁抚顺,2006年于武汉大学电子信息学院获通信与信息系统专业博士学位,现为高级工程师,主要从事雷达系统研发工作。
YANG Yong was born in Fushun,Liaoning Province,in 1978.He received the Ph.D.degree from Wuhan University in 2006.He is now a senior engineer.His research concerns radar system R&D.
Email:25600073@qq.com