采用扩频技术的数字天线跟踪系统设计*
2014-01-26丁勇飞
方 正,丁勇飞,龚 诚
(1.中国航空无线电电子研究所,上海200241;2.航空电子系统综合技术重点实验室,上海200233;3.上海交通大学电子信息与电气工程学院,上海 200240)
采用扩频技术的数字天线跟踪系统设计*
方 正1,2,3,**,丁勇飞1,龚 诚1
(1.中国航空无线电电子研究所,上海200241;2.航空电子系统综合技术重点实验室,上海200233;3.上海交通大学电子信息与电气工程学院,上海 200240)
在介绍雷达领域传统目标跟踪方式基础上,设计了一种基于扩频体制并有效融合“模极值捕获跟踪”和“数字导引”的数字天线跟踪系统。通过精心设计通信帧格式,并采用具有良好正交性的PN码(Walsh)序列“携带”GPS信息用于数字导引,使得系统在具有30 dB高同步捕获增益的前提下同时具有可控的扩频抗干扰增益,在初始捕获和抗干扰通信过程中发挥重要作用。系统采用具有快速算法的自适应滤波技术对数字导引信息进行置信度分析。建模仿真与飞行试验表明,该方法相对传统体制具有更高的灵活性和可靠性。
PD雷达;目标跟踪;天线跟踪系统;模极值跟踪;数字导引;自适应滤波
1 引言
传统的PD雷达多采用线性调频(Chirp)信号作为发射信号,接收机采用脉冲压缩-多普勒(PD)技术对回波信号进行二维积累(时域脉压和频域DFT)和动目标跟踪(MTI)。如果定向天线采用抛物面或固定相位波束合成的天线形式,那么目标跟踪的精度除了取决于波束形成的物理特性外(方向精度),还取决于产生的Chirp信号的带宽、脉宽与周期(距离精度与距离模糊)。动目标跟踪的方向精度、距离精度和最大不模糊距离的性能要求往往交织在一起,顾此失彼,且信号处理复杂,运算量较大。如果仅应用GPS信息进行数字导引,那么定向天线的初始目标捕获、GPS信息的抗干扰传输以及置信度分析将成为影响目标跟踪稳定性的关键因素。目前国内普遍采用的定向天线跟踪技术多是脉冲调制方式,缺乏数字手段辅助导引跟踪,会带来可靠性、引导跟踪能力不够等问题;同时,由于未采用成形技术,其瞬时带宽较大也是普遍存在的问题之一。
本文在传统天线平台动目标跟踪体制的基础上,将数字扩频技术[1]引入传统定向天线跟踪方法,在不增加硬件开销的同时使系统具备一定程度的抗干扰数据链传输能力。此外,系统将模极值跟踪和数字导引技术有效融合,能够解决可靠性、引导跟踪能力不够等问题。
2 系统技术分析
系统同步和导航业务数据的可靠接收解调是整个系统的核心关键。通过精心设计物理层通信帧结构,合理选用、组合M序列和Walsh序列,以及直扩和多进制扩频技术,使链路在具备高同步增益的前提下(保证了捕获跟踪的可靠性),同时具备了一定的抗干扰数传能力(目前25.6 kb/s,用于传输导航信息);此外,相对于普通扩频系统的相关处理方法,本文提出的模极值处理方法可以在不降低相关增益的前提下有效对抗突发干扰带来的相位模糊等技术问题。系统原理框图与无线链路通信帧设计如图1所示。
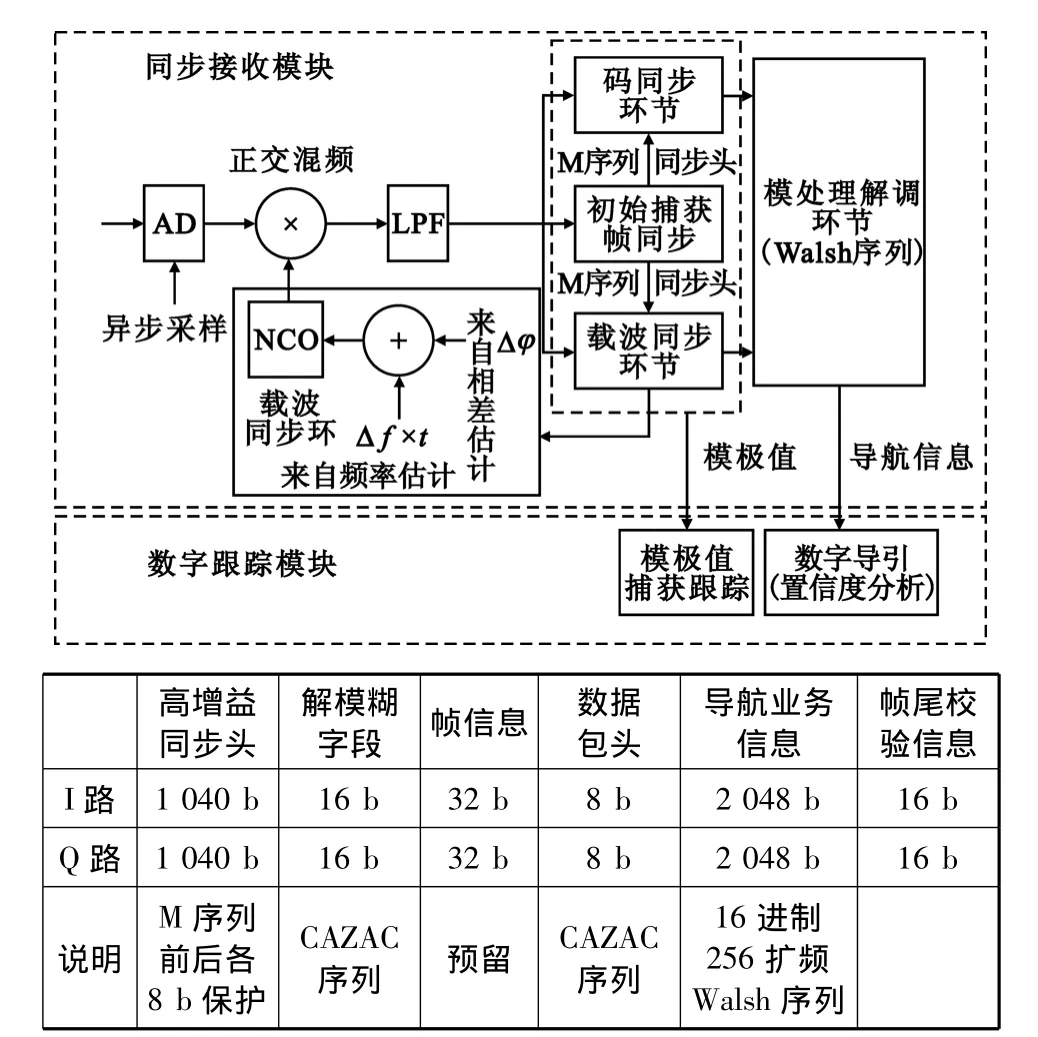
图1 系统原理框图与通信帧设计Fig.1 System block diagram and communication frame design
首先对输入的中频信号(载频f1)以采样率fs进行带通采样,经过(f1-n×fs)的数字混频(DDC)、低通滤波(LPF)后得到(存在频偏和相偏的)零中频的复基带信号,表示为

式中,含有载波频偏、相偏、PN码偏以及由于频偏和相偏带来的正交串扰等,其中PN码偏中包含信道延迟带来的相偏以及本地采样时钟非同步带来的频偏和相偏。
数字混频DDC的本地载波输入是由鉴频器输出的频差Δf的估计和载波同步环输出的相差Δφ的估计共同控制NCO产生的同步载波信号,混频器输出I、Q两路信号。
LPF环节的滤波器参数应当根据发端成形 (根升余弦滤波器)设计为相应的匹配滤波器,出于计算量的考虑以及后续抽取的方便,可以结合抗混叠抽取滤波设计为级联的半带滤波器 (HBF)组[2]。
系统完成同步 (帧同步、码同步、载波同步)后,将高增益同步头的模极值信息输送至数字跟踪模块用于天线捕获跟踪;同时复基带业务数据进入模极值解调环节,经十六进制正交Walsh序列的模处理解析出导航数据,用于数字导引的置信度分析。
2.1 模极值跟踪技术分析2.1.1 系统同步设计
系统的码同步和载波同步均围绕比例积分环路设计,设计框图如图2和图3所示。
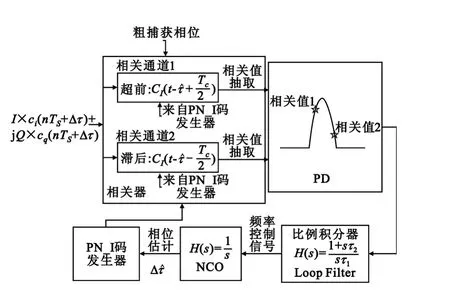
图2 码同步设计框图Fig.2 Code synchronization design diagram
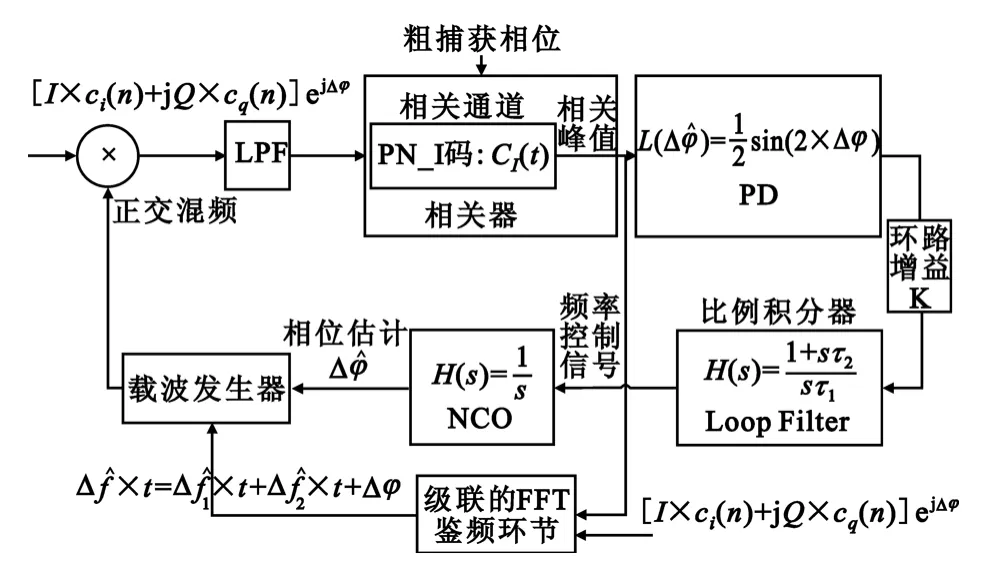
图3 载波同步设计框图Fig.3 Carrier synchronization design diagram
系统实现可靠的码同步和载波同步需依赖于通信帧前端的高增益同步头,出于可靠性设计考虑,当前系统的高增益同步头设计为I路和Q路相互正交的两组PN码(PN_I和PN_Q),同步接收时将本地PN码与DDC输出的I路和Q路接收信号分别相关、平方和,通过模值处理取得位同步信息。上述同步设计使系统具有以下特点:
(1)采用模值处理方式能够减小残余频差和相差对同步性能的影响(残余频差导致的相关峰值削弱将在下面讨论);
(2)采用正交的PN码同步头能够有效减小多径环境下的虚警同步概率;
(3)为使业务数据包尽可能地“拿到”抗干扰增益,工程上同步头的相关增益应设计为比业务数据的抗干扰增益大至少6 dB(考虑到相关噪声导致的性能恶化等);
(4)受载波同步环路带宽限制,接收前端应结合FFT方法并根据合理的频率扫描策略设计合适的鉴频模块。
2.1.2 影响同步接收性能的几个因素
(1)环路滤波器对同步性能的影响
载波同步环路和定时同步环路都采用了含有理想环路滤波器的二阶二型环。理想环滤(低通)的数学模型[3]为

理想环滤可以等效成比例-积分因子和归一化因子之和。理想环滤的二阶二型锁相环具有良好的载波跟踪和窄带滤波特性,同时,其开环传递函数分子上的附加相移(τ2的作用)引入了更大的相位裕度,使得系统更加稳定(通过分析开环传递函数的伯德图可知)。环路的3个重要参数——环路增益G、比例因子τ2和积分因子τ1决定了环路的所有特性。环路参数的选择还应当兼顾噪声特性和暂态时间,理想的环路应当工作在弱欠阻尼状态,且暂态过冲不超过5%,这就要求阻尼系数ξ的经验值一般在0.7左右。
(2)时差、频差对同步性能的影响
分析时差和频差对相关峰值的影响,对于精确分析系统同步的可靠性以及鉴频环节的设计指标都具有重要意义。图4和图5是通过Matlab对二维同步性能恶化的建模仿真结果。

图4 归一化时偏、频偏对相关峰值的影响Fig.4 The effect of time and frequency offset on correlation peak
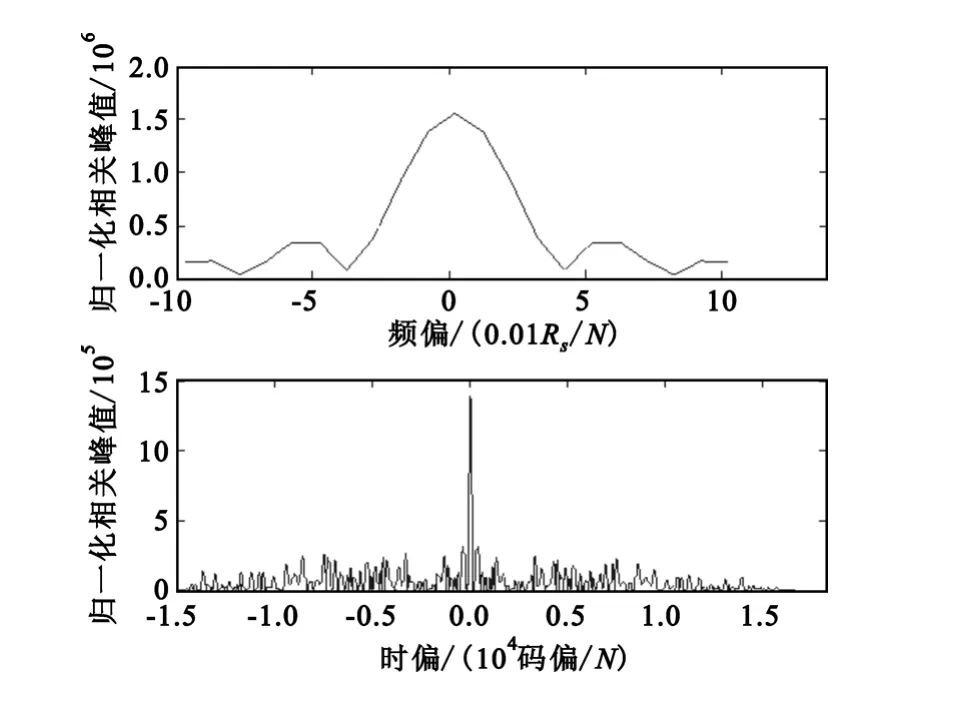
图5 二维切面图Fig.5 Two dimensional surface chart
在图4中,时偏以PN码偏的1/N为单位(N为PN码长),频偏以原始symbol速率的(1/N)×1%为单位。由图5可以看出,频偏对相关峰值积累结果有SINC滚降效果,此外在时域上还会引入调制。后者的效果在当频偏较大,达到symbol速率Rs的1%以内时较为明显,如图6所示。
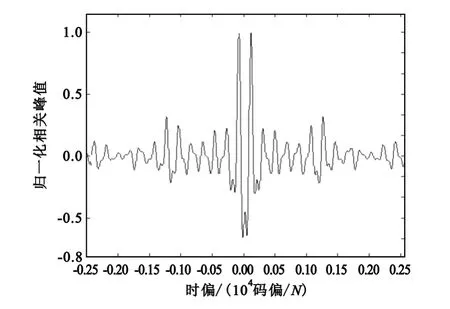
图6 频偏在Rs/N时的时域相关曲线Fig.6 Time domain correlation curve of frequency offset under Rs/N
2.1.3 模极值跟踪策略设计
天线模极值跟踪策略设计如图7所示,在当前设计的策略中,根据使用环境的不同,在扫描捕获锁定判决环节应采用以下不同的锁定判决策略:
(1)当使用环境中多径情况比较严重时(如地面跟踪天线),锁定策略应当以“圈扫”模极值中的最大值位置作为初始捕获锁定位置;
(2)当使用环境中多径情况不严重,但天线平台存在大机动情况时(如机载动中通跟踪天线),锁定策略应当以“圈扫”模极值的加权值作为捕获门限,过门限即锁定。
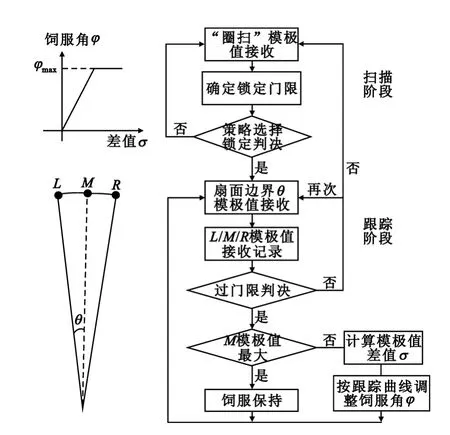
图7 模极值跟踪策略Fig.7 Mold extreme tracking policy
2.2 数字导引跟踪技术分析
定向天线工作框图如图8所示。
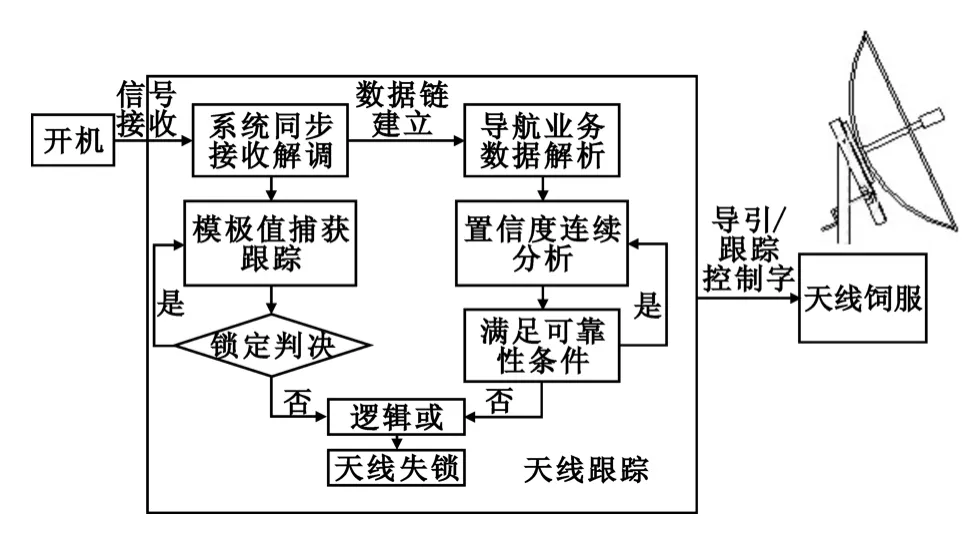
图8 天线工作框图Fig.8 Aerial work diagram
初始状态下,数据通道尚未建立,当完成模极值捕获跟踪并建立数据通道后,系统对接收到的导航信息进行自适应航迹关联置信度分析,如果导航数据可靠,则切换至数字导引工作模式。
转入数字导引模式后,为了保证目标跟踪的可靠性、稳定性和实时性,需要在嵌入式平台上通过矩阵和三角运算[4]将机载导航信息转化为目标相对位置信息。
数字导引的置信度分析保证了导引信息的可靠性,在置信度较高时,可靠的导航信息可用于修正后台运行的模极值跟踪模块,提升系统实时跟踪能力;一旦发现置信度过低或不可靠,系统将自动切换到一直在后台运行的模极值跟踪模式,从而保证了系统的可靠稳定工作(系统帧设计保证了模极值跟踪模式具有非常高的相关增益,失效概率远低于数字导引,但伺服控制实时性不如数字导引模式)。
2.2.1 坐标变换技术
目标相对位置解算问题的本质是方位矢量由地心极坐标系向站心极坐标系的坐标变换,在本文采用的坐标转换方法中还用到了地心直角坐标系和站心直角坐标系,地心极坐标系、地心直角坐标系和站心极坐标系、站心直角坐标系的定义如图9所示。

图9 地心极坐标系和站心极坐标系Fig.9 The geocentric and topocentric polar coordinates
由图9可见,上述几种坐标系的定义如下:
(1)地心直角坐标系Xe-Ye-Ze与地心极坐标系Ρe-Φe-Θe的关系:Xe轴指向零经度子午线,Ye指向90°经度线,Ze是北极轴;经度Θe是方向,纬度Φe是方向,Ρe是地心与本机所在点A的连线方向;
(2)站心直角坐标系Xg-Yg-Zg与站心极坐标系Ρg-Φg-Θg的关系:Zg是地球表面“扩张”到地面接收天线所在点处A点切面的法线方向(指向太空,注意因为地球扁率的存在,其反向延长线只有接收天线在赤道或南北极上方时才经过地心),Xg-OA-Yg平面是经过A点与法线Zg方向垂直的切面,站心坐标系以本机所在点OA为原点,OA-Yg轴定义为Xg-OA-Yg平面内指向地心坐标系下北极轴的方向,OA-Xg定义为与之垂直并满足左手螺旋定则的方向。
目标飞行器的经、纬、高度信息以m_Lon1、m_Lat1和m_Height1表示,分别对应地心极坐标系下的 θe1、φe1、ρe1(m_Height1 是气压高度,还应当加上地心曲率半径);接收天线的经、纬、高度,以 m_Lon0、m_Lat0和m_Height0表示,分别对应地心极坐标系下的 θe0、φe0、ρe0(m_Height0 类同)。假设从接收天线指向目标的方向矢量为A(注意:不是接收天线的波束方向,而是两点连线的方向矢量),则矢量A在站心极坐标系Ρg-Φg-Θg下的三维坐标ρg、θg、φg就是我们的求解目的。求解出站心极坐标后,目标相对接收天线的方位就可以确定,再通过水平维和俯仰维的天线校准,将接收天线的波束指向与目标对齐,完成数字导引。
下面介绍采用的坐标变换算法。
(1)由接收天线在地心极坐标系下的坐标m_Lon0、m_Lat0和m_Height0(即接收天线的经、纬、高度)计算地心直角坐标系下的坐标X0、Y0、Z0:

注意:参数a为地球长轴半径(赤道平面的圆半径),W为WGC84坐标系下地球的扁率,反映地球经度椭圆投影面的曲率,由于地球扁率的存在,不能简单地以地球长轴加上本机高度作为ρe1参数,而应当用经过曲率修正的N代替长轴半径a,在目标的坐标转换中也存在同样问题。
(2)由目标在地心极坐标系下的坐标m_Lon1、m_Lat1和m_Height1计算地心直角坐标系下的坐标X1、Y1、Z1。
(3)在直角坐标系下用目标的坐标(X1,Y1,Z1)减去接收天线的坐标(X0,Y0,Z0),得到相对位置矢量珔A(在“地心”直角坐标系下的坐标),相当于将“地心”平移至接收天线所在位置A点处了。
(4)由矢量珔A在“地心”直角坐标系下的坐标(X1-X0,Y1-Y0,Z1-Z0)计算在“站心”直角坐标系下的坐标(x,y,z):

(5)将站心直角坐标系下的坐标(x,y,z)转化为站心极坐标系下的坐标(m_D,m_A,m_E),分别表示目标相对接收天线的距离、方位、俯仰:
2.2.2 数字导引置信度分析技术
为保证数字导引的可靠性,需要对接收到的机载导航数据进行置信度分析,我们采用雷达领域的自适应航迹关联技术实现这一目标。同时简化了自适应滤波算法,通过对观测噪声的统计数值分析将耦合了激励与观测噪声的新息去耦,在MSE准则下得到相对最优参数的增益矩阵,并进行一步线性预测,据此进行导航信息的置信度分析。自适应滤波可采用Kalman模型[5],本文不再赘述。
3 结论
本文论述的基于扩频系统的数字天线跟踪技术相对传统天线跟踪技术在以下几个方面具备优势:
(1)抗干扰数据链传输能力方面:相对普遍采用的脉冲调制传统天线跟踪技术,本文所述关键技术具备一定程度的数据链传输能力,在不改变系统设计平台的前提下,应用软件无线电技术可使得系统抗干扰能力和数传能力进行动态重配置;
(2)数字引导能力方面:相对传统天线跟踪技术,本文所述关键技术具备数字导引能力,设计快速算法自适应航迹跟踪算法对飞机导航位置信息进行置信度分析,在建立数据链后可实现快速、精确的数字导引;
(3)可靠性方面:设计融合模极值捕获跟踪算法和数字导引算法构成互为后台热备份的双模跟踪技术,可以有效提高了目标捕获、跟踪的稳定性和可靠性。
一系列信道建模仿真和飞行试验证明,相对于传统目标跟踪技术,本文介绍的技术对系统目标跟踪性能提升明显,系统可靠性得到进一步增强。
虽然机载、地面相控阵天线,以及数字波束合成(DBF)和多目标跟踪技术的应用日趋广泛,但其居高不下的使用、维护成本,增益、可靠性指标等方面的固有插损同样是不可回避的问题,至少在最近的若干年内,基于传统天线平台(相同增益下,相对相控阵天线,这种固定波束天线伺服系统的成本仅为不到五分之一)的技术创新还是有着非常广阔的应用前景的。
本文论述的关键技术以本文第一作者参与和负责的型号项目为背景,在试飞验证过程中运行可靠稳定,未发现例外和难以解释问题,是经过了军航体系使用鉴定的成熟技术,能够在不改变现有列装系统(硬件)平台的前提下最大程度地发挥其潜在性能,同时能够使系统可靠性得到进一步提升,具有广阔的应用前景和重要的发展意义。
[1]Proakis J G.Digital Communications[M].4th ed.Beijing:Publishing House of Electronics Industry,2006:524 -552.
[2]杨小牛,楼才义,徐建良.软件无线电原理与应用[M].北京:电子工业出版社,2002.
YANG Xiao - niu,LOU Cai- yi,XU Jian - liang.Software Radio Theory and Application[M].Beijing:Publishing House of Electronics Industry,2002:41 -43.(in Chinese)
[3] 张厥盛,郑继禹,万心平.锁相技术[M].西安:西安电子科技大学出版社,1994:20-29.
ZHANG Jue-sheng,ZHENG Ji-yu,WAN Xin-ping.Phase Lock Loop technique[M].Xi'an:Xidian University Press,1994:20-29.(in Chinese)
[4] 程云鹏.矩阵论[M].西安:西北工业大学出版社,2004:26-34.
CHENG Yun-peng.Matrix Theory[M].Xi'an:Northwest Polytechnical University Press,2004:26 -34.(in Chinese)
[5] 陆光华,彭学愚,张林让,等.随机信号处理[M].西安:西安电子科技大学出版社,2002:48-57.
LU Guang-hua,PENG Xue-yu,ZHANG Lin-rang,et al.Random Signal Processing[M].Xi'an:Xidian University Press,2002:48 -57.(in Chinese)
Design of Digital Antenna Tracking System w ith Spread Spectrum Technology
FANG Zheng1,2,3,DING Yong - fei1,GONG Cheng1
(1.China National Aeronautical Radio Electronics Research Institute,Shanghai 200241,China;2.Science and Technology on Avionics Integration Laboratory,Shanghai 200233,China;3.School of Electronic,Information and Electrical Engineering,Shanghai Jiaotong University,Shanghai 200240,China)
A new digital antenna tracking system which combines both module maximum tracking and digital navigation is designed based on introduction of traditional radar antenna target tracking method.The communication frame structure is delicately designed,which ensures both 30 dB high synchronization gain and a reliable wireless transmission.Besides,adaptive filtering with fast calculating method is applied during digital navigation to ensure the credibility of the information.Simulation and flight tests demonstrate that the proposed two-mode antenna tracking method brings much more flexibility and reliability.
PD radar;target tracking;antenna tracking system;module maximum tracking;digital navigation;adaptive filtering
The Aeronautical Science Foundation of China(2013ZC15003)
**
149560759@qq.com Corresponding author:149560759@qq.com
TN953;TN820
A
1001-893X(2014)05-0615-06
10.3969/j.issn.1001 -893x.2014.05.017
方正,丁勇飞,龚诚.采用扩频技术的数字天线跟踪系统设计[J].电讯技术,2014,54(5):615 -620.[FANG Zheng,DING Yong - fei,GONG Cheng.Design of Digital Antenna Tracking System with Spread Spectrum Technology[J].Telecommunication Engineering,2014,54(5):615 -620.]
2013-09-03;
2014-04-04
date:2013-09-03;Revised date:2014-04-04
航空科学基金资助项目(2013ZC15003)

方 正(1983—),男,安徽人,2008年于西安电子科技大学获硕士学位,现为工程师、上海交通大学博士研究生,主要研究方向为航空无线电信号处理;
FANG Zheng was born in Anhui Province,in 1983.He received the M.S.degree from Xidian University in 2008.He is now an engi-neer and currently working toward the Ph.D.degree.His research concerns aeronautical wireless communication signal processing.
Email:149560759@qq.com
丁勇飞(1971—),男,浙江人,1999年于西北工业大学获硕士学位,现为研究员,主要研究方向为航空无线电系统设计;
DING Yong-fei was born in Zhejiang Province,in 1971.He received the M.S.degree from Northwestern Polytechnical University in 1999.He is now a senior engineer of professor.His researcher concerns aeronautical radio system design.
龚 诚(1958—),男,广西人,1994年于英国贝尔法斯特女王大学获博士学位,现为教授,主要研究方向为航空电子总体设计。
GONG Cheng was born in Guangxi Zhang Autonomous Region,in 1958.He received the Ph.D.degree from the Queen’s University of Belfast in 1994.He is now a professor.His research concerns avionics integrated design.