一种求工业机器人工具参数的方法
2014-01-24王仁胜
王仁胜
(安徽埃夫特智能装备有很公司,安徽 芜湖 241007)
一种求工业机器人工具参数的方法
王仁胜
(安徽埃夫特智能装备有很公司,安徽 芜湖 241007)
本文主要介绍一种在工业机器人中通过示教获得位置点并自动为用户生成工具参数值的方法,从原理的角度进行剖析.首先示教知道机器人法兰末端在世界坐标系下的值,之后通过齐次变换矩阵,通过算法算出工具参数的位置值.
机器人工具参数;四点法;齐次变换
概述
机器人在今天的社会生产中扮演着越来越多的作用,应用在焊接,喷涂,切割不同的行业,但是机器人针对不同行业的应用工具末端的夹爪设计是不一样,机器人在出厂时并不知道法兰末端上所装夹爪的具体尺寸,本文介绍一种通过四点法示教的方法从程序内部算出机器人法兰中心点到工具TCP中心点的偏移量.本文主要是从原理的角度剖析一种从法兰中心到TCP点的工具参数的方法.
一、齐次坐标变换
已知一直角坐标系中的某点坐标,则该点在另一直角坐标系中的坐标可通过齐次坐标变换得到
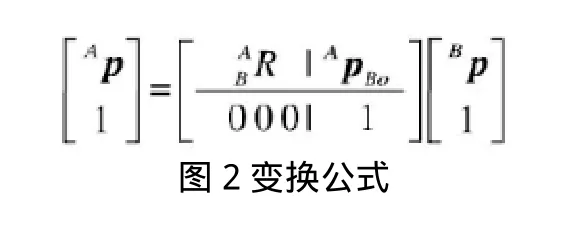
图1中 P点在空间A坐标系下的坐标值可以表示为空间B坐标系在A中的齐次变换矩
乘以在B坐标系下的值.齐次坐标变换矩阵是一个四乘四的矩阵.前三列表示B的原点坐标三
个方向在A中的旋转矩阵,后一列则表示B的原点在A中的位置值.有了这个理论基础就可以
进行工具参数的方法的设置(如图1-2).
二、示教四点算出圆心
1 首先在工具附近空间选取一个固定的位置点,然后以示教的方式按照不同的姿态去逼近 该点,记录下此时四个点的坐标值.此时四个点的值实际是没有带工具参数的值,即是法兰中心点的坐标值.如图2:


组成一个三元的方程组,可以求出Cx,Cy,Cz的值.
三、求工具参数值
如图4根据齐次变换矩阵的原理

P点在A坐标系下的值AP可以分为二步完成.1.首先旋转坐标变换:B坐标系是基于A坐标
系绕X/Y/Z方向的旋转矩阵乘以P在B坐标系下的值.2.平移变换:加上B坐标系原点B0在

图6 旋转变换值

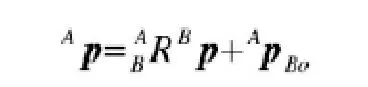
图5 复合变换公式
结语
本文主要是从原理的角度简述了一种通过四点示教的方法,运用MATLAB的仿真通过算法进行求解机器人工具参数,在基于贝加莱AS软件平台中已经得到广泛应用.
[1]周建兴,等. MATLAB从入门到精通[M].北京:人民邮电出版社.
[2]蔡自兴.机器人学[M].北京:机械工业出版社.
TP31
A
10.13612/j.cnki.cntp.2014.07.101
