一种创新性激光图像三维目标识别算法
2014-01-23李迎春范有臣
李迎春,范有臣
(1.装备指挥技术学院光电装备系,北京101416;2.装备指挥技术学院研究生院,北京101416)
1 引言
基于激光图像信息的目标识别技术是激光主动成像系统的关键技术之一。根据获取的激光图像进行三维目标识别时,目标在空间的姿态具有随机性:当从不同的视角去观察时,所看到的目标图像各不相同,形状比较复杂,发射激光和成像探测器的方向及位置也随着成像平台不断运动,目标相对于成像探测器在不同方向角所呈现的图像姿态变化万千,目标到成像探测器的距离不同使得目标在二维图像中的大小尺度不同,使得目标识别的难度大大增加。由于三维目标在激光成像过程中丢失了许多信息,如目标的纹理、颜色、深度、清晰的结构等,再加上激光散射、成像系统模糊、噪声干扰等的影响,使获取的二维激光图像中的目标只有不很清晰的形状、轮廓、亮度信息。所以如何利用二维激光图像进行三维目标识别,相当于不确定性问题求解,给目标识别带来了困难。
三维目标识别的重要任务是从大量数据中获取知识[1],表达知识并推理决策规则,其中涉及如何对大量的冗余数据和不完全数据进行处理。对于不准确以及不完整的知识,粗糙集理论[2]和人工神经网络方法[3-4]都显示了它们各自的优势。粗糙集理论可以输入定性、定量或者混合性信息,而神经网络一般不能处理具有语义形式的输入[5]。神经网络可以实现无导师聚类学习,但不能确定哪些知识是冗余的,哪些知识是有用的,而粗糙集理论可以描述知识表达中不同属性的重要性,简化知识表达空间,但它是从训练数据中推理规则的。鉴于粗糙集和神经网络在信息处理方式、知识获取、抗噪声能力、泛化性能等方面有很多互补之处,本文将两者相结合进行激光图像目标识别方法研究,把粗糙集方法作为人工神经网络方法的前置系统,通过粗糙集方法去掉冗余信息,使训练集简化,进而减少人工神经网络的训练时间;同时使用人工神经网络作为后置的识别系统,有较强的容错和抗干扰能力。
2 基本原理
结合粗糙集理论的集成神经网络,以三维目标识别为应用目标,是将人工智能的粗糙集理论同神经网络模式识别相结合而建立的系统,利用粗糙集理论的知识推导优势,处理大量的样本特征,进行属性约简后再提取特征,弥补神经网络一些自身不可克服的缺陷,建立结构更简单、训练时间更短的神经网络空间目标图像识别系统。
整个识别系统分为离线部分和在线部分。离线部分的任务是对各类空间目标不同视角下的激光图像进行去噪、分割,提取图像中目标的约简特征,确定用于识别的有效特征,对各类特征进行离线学习,确定神经网络的参数及连接权值,构建识别神经网络。在线部分的任务是对任意一幅输入的目标激光图像进行的实时识别,确认目标的类型。基本框架如图1所示。
原始数据源是激光主动成像系统的仿真图像,首先建立目标的三维模型,再根据激光器模型、成像模型,对目标经过激光主动成像得到的图像进行仿真,由此得到三维目标不同角度、不同距离的激光图像。
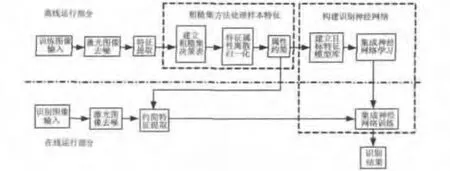
图1 结合抗噪粗糙集的集成神经网络空间目标识别基本框架图
仿真图像经过去噪与分割、特征提取模块处理,形成了多个数字特征,组成一个特征向量。每一个空间目标由于其成像视角不同,可能形成多幅激光图像,最终输出多组特征向量组成原始样本特征集。
得到原始样本特征集之后,通过粗糙集方法去掉冗余信息,使训练集简化,建立目标特征模型库,构建神经网络。在线输入激光图像时就可以只提取约简的目标特征,采用已经构建好的神经网络识别目标。
3 激光图像仿真与处理
3.1 目标激光主动成像仿真
利用OpenGL软件通过编程的方式进行空间目标三维实体建模,如图2所示为某卫星三维模型。当三维目标运动相对于成像探测器运动时,从不同的角度观测目标会得到不同的二维投影侧面视图。为方便研究,不考虑成像平面与目标的距离,按照经纬度划分视觉球的方法,方位角和俯仰角等间隔的自动选取不同视角获取的目标二维视图,如图3所示。再采用基于目标模型的激光主动成像仿真方法[6],利用建立的空间目标三维模型得到的二维图像作为成像仿真的基准图,对目标的不同成像角度进行成像仿真,并加入噪声影响,如图4所示。

图2 某卫星三维模型
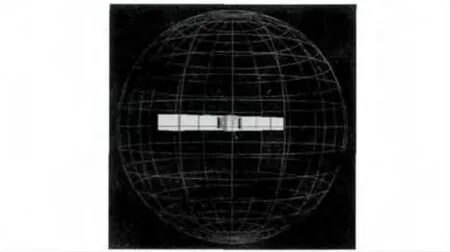
图3 按照经纬度划分视觉球示意图

图4 某卫星在不同视点的激光主动成像仿真图像
3.2 激光图像去噪分割算法
针对激光主动成像中混有随机加性噪声和散斑乘性噪声的特点,采用了一种混合滤波算法。该方法把中值滤波和小波滤噪进行了结合,首先利用自适应中值滤波器,根据噪声干扰程度,采用变换窗口大小的方法,在原有中值滤波算法中加入一个判断操作,以判断窗口内像素中值及滤波处的像素点灰度值是否为脉冲噪声,然后分别进行处理[7];然后利用基于相邻系数的小波自适应阈值方法对图像进行去噪处理[8]。
激光图像经过去噪声处理后,采用迭代式阈值分割算法实现图像的分割,得到二值化图像[9]。在迭代式阈值分割算法中,首先选择一个近似阈值作为估计值的初始值,将图像分割成两部分,计算两个部分的均值,在此基础上选择新的阈值,再使用新阈值分割图像,重复上述步骤,直到分割阈值不再变化。
以某卫星的一幅仿真激光图像为例,分割处理结果如图5所示。采用迭代式阈值分割算法对图像进行分割后,图像中目标区域可能会有一些空洞,如图5(c)所示。使用形态学膨胀、腐蚀算法,选用正方形的结构元素,能够填补目标区域使其完整,如图5(d)所示。
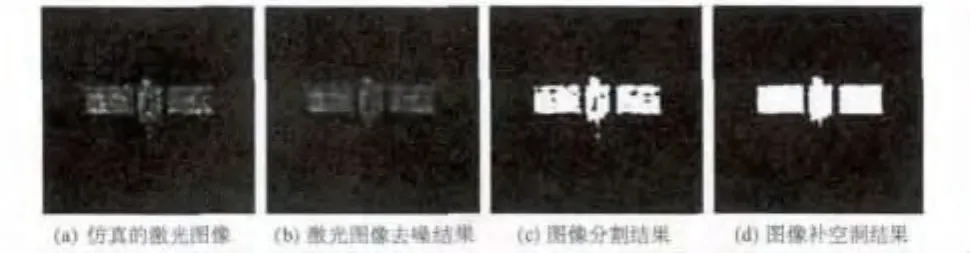
图5 某卫星激光图像预处理结果
3.3 目标特征提取
目标识别的关键之一在于提取反映目标本质属性的特征参量[10]。常用的目标图像特征有:图像几何特征(如周长、面积、复杂度、体态比等)和图像统计特征(如几何矩、Hu不变矩、仿射不变矩和小波矩等)。
简单的几何特征具有易于计算的优点,几何特征不变性的稳定程度有所不同。其中,体态比具有良好的二维平面不变性,即在缩放、旋转及平移变换中均具有较好的不变性,可以作为粗略匹配中一个有效的特征向量加以利用。
同一目标不同姿态下图像的Hu不变矩、仿射不变矩和小波矩的特征分量值的取值范围较大,且不同目标图像的特征分量值之间存在一定程度的重合,不能通过某个单一的特征分量完成对卫星目标的识别。分析其原因,主要是因为同一目标姿态变换后得到的二维图像形状差异较大,造成计算得到的特征值变化较大,不同卫星目标图像的特征分量就存在重合的可能。
由此可见,对于Hu不变矩、仿射不变矩和小波矩,每种矩特征中都存在几个具有较好的二维平面不变性和一定视角范围内的特征不变性的特征分量,同时也存在不变性较差的特征分量。如果仅采用任意一种矩特征应用于目标识别,达不到较好的识别效果。
根据以上对空间目标多视点特征的分析,本文把激光图像中提取出的空间目标的几何特征和统计特征值组成一个特征向量。其中包括1个几何特征(二值图像体态比)、7个Hu不变矩特征、3个仿射不变矩特征、6个小波矩特征,共计17个特征。这些特征具有相对较好的鲁棒性。
考虑到三维目标识别所需的特征量较多,如果在识别过程中,每识别一次都要反复提取目标多视点特性视图中的特征,将会使识别速度大大降低。可以根据前面的分析,针对每一个三维目标模型得到的每一幅特性视图,提前计算其中的特征量,建立目标多视点特征数据库。在后续识别时,只要计算出当前需要识别的一幅图像的特征,然后在数据库中采用查表的方式进行匹配识别即可。这样可以大大减少计算时间,提高识别速度。建立特征数据库的过程包括以下几个步骤:(1)选取目标模型进行编号;(2)按照经纬度划分视觉球的方法,方位角和俯仰角等间隔的选取目标多视点视图。对图像序列进行编号,并记录其相应的观察视角角度;(3)对得到的多视点视图进行图像处理,得到二值化目标图像;(4)进行特征提取,计算各种特征值,设置目标是否轴对称等标志,并依次记录存储;(5)重复以上步骤,组成空间目标多视点特征数据库。
4 采用粗糙集方法对特征约简
利用粗糙集约简特征作为激光图像神经识别网络的前置步骤,其主要目的是做特征筛选,即利用粗糙集方法来选择分类的属性,作为建立识别神经网络学习的输入数据,减少神经网络的输入层的节点个数,从而缩短神经网络的训练时间,简化神经网络的结构,同时在约简特征维数时,推导出相应的规则,即分类知识,作为构造识别神经网络中间层的依据。
粗糙集方法对特征的处理主要分为特征属性的离散归一化、特征属性的约简两个部分。
(1)特征属性的离散归一化
在粗糙集的特征约简中,必须把所得的特征信息数据归一化,使得用于粗糙集方法分析的决策表是有限维数的离散化数据表。离散归一化方法应该满足如下条件:①属性离散归一化后的空间维数应尽量小;②属性值被离散归一化中信息丢失应尽量少。
对每一幅激光图像中提取出的17个特征经过简单的线性归一化后发现,各特征值不是均匀地分布在[0,1]区间。某些的特征值变化幅度较小,有些甚至始终集中分布在接近1的较强信号区域或接近0的较弱信号区域。如果采用常用的等频法、等区间法[11-12]等均匀化的离散方法直接对这些特征属性数据进行离散化,得到的编码将不符合实际数据模式本质特性,在很大程度上影响不同对象的可辨别能力。
可以对不同取值范围的特征值进行非线性离散归一化处理[13],实现特征值的统一化分类与处理,得到相对一致的分类编码标准。同时,为了粗糙集的方便运算和发挥条件属性的综合判决效果,对特征属性的量化也不宜过细,否则会带来决策表的较大浮动,不利于属性间共性问题的提取与训练。因此,对于不同的特征值,通常最多离散化编码至识别对象的半数。例如,为识别和判决6种不同目标,通常将特征属性的离散化编码数置为3,即单个条件属性最多只分为3类。
(2)特征属性的约简
当实际的特征属性数据集存在噪声或不完整性时,易产生偶然规则或不相容规则。本文利用属性约简方法在对目标样例进行分析的同时,自动标记出重复样例、偶然性样例和不相容样例[13],并在此基础上构建包含可信度的决策表,将依赖度、重要度与可信度建立关系,利用粗糙集的相关理论对决策表进行约简。特征属性的约简算法包括:不相容规则的处理、粗糙集的约简、粗糙集精简3个步骤。
经过特征属性约简后,将已经简化的条件属性作为规则的前部,决策属性作为规则的后部,就可以形成决策规则。
仿真中,通过对六种型号的在不同角度拍摄的卫星照片进行预处理,然后提取出一组Hu不变矩、仿射不变矩、小波矩和二值图像体态比,共17个属性,然后对其进行归一化处理和压扩式非均匀离散化,并对样例进行分析,自动标记出重复样例、偶然性样例和不一致样例,并在此基础上构建包含可信度的决策表(包含条件属性集、决策集和可信度),然后,将依赖度γ(X-{xi},D)和重要度SGF(X-{xi},D)与可信度ηJ(i)建立关联关系,利用粗糙集的相关理论对决策表进行约简,得到训练规则[13]。
通过仿真,得到的部分离散化编码决策表如表1所示。
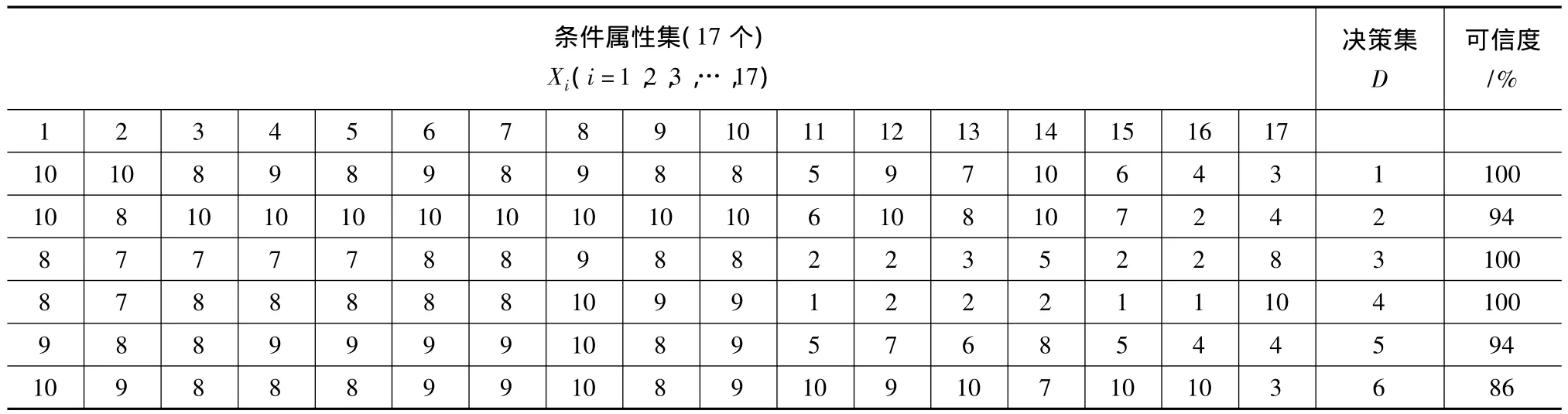
表1 离散化编码决策表(部分)

表2 粗糙集精简后的规则表
简化后的决策表如表2所示。可以看出,利用粗糙集对特征进行约简后,最初选取的17个特征属性精简到了5个,将大大减少对激光图像进行特征提取的工作量,提高自动识别的速度。
5 仿真结果分析
采用结合粗糙集的集成神经网络方法对激光图像进行目标识别。选用径向基神经网络作为基本的网络结构,但在选择各层节点上与粗糙集相结合,充分利用上节中粗糙集处理部分得到的结果辅助神经网络的构造。对径向基神经网络进行了改进,网络共由4层神经元组成一个多输入多输出系统。粗糙集规则的条件部分由前两层网络连接实现。第3层神经元表示粗糙集推出的规则,其中每个神经元代表一条规则。第4层神经元是规则的结论,即三维目标种类的输出。
神经网络中需要先用训练样本对网络进行训练,再将测试样本输入已训练好的网络得出识别结果。实验训练指标为:训练精度为0.1,径向基函数的宽度以0.5为间隔在[1,3]取值,若经一次集成训练后不能确定输出类别,则再次进行网络训练,此时径向基函数的宽度为(0.8,1,1.5,1.6,2,2.4,2.5,3),若仍然不能确定,则输出为不能确定类型。
首先,对六个几何形状不同的卫星建立目标多视点特征数据库。每个模型在俯仰角为-90°~90°、方位角为0°~360°的范围内,按经纬度划分视觉球的方法每间隔20°获取一幅图像,得到162幅不同视点下的目标特性视图。通过图像分割得到目标二值图像,提取利用属性约简方法获得的5个有效特征,组成目标多视点特征数据库。以一个卫星数据为例,数据库内容如表3所示。把数据库中的图像特征进行离散归一化、抗噪粗糙集属性约简后,作为训练样本,输入到径向基神经网络中进行训练,确定神经网络各层之间的连接权值。

表3 目标多视点特征数据库内容
再重新对这六个卫星按经纬度划分视觉球的方法每隔15°生成测试图像,得到目标在不同姿态下的激光主动成像仿真图,共6×288=1728幅。对激光图像进行预处理、提取特征数据后作为测试样本输入到训练好的神经网络中进行识别,统计识别结果。对千余次识别结果进行统计,识别如表4所示。
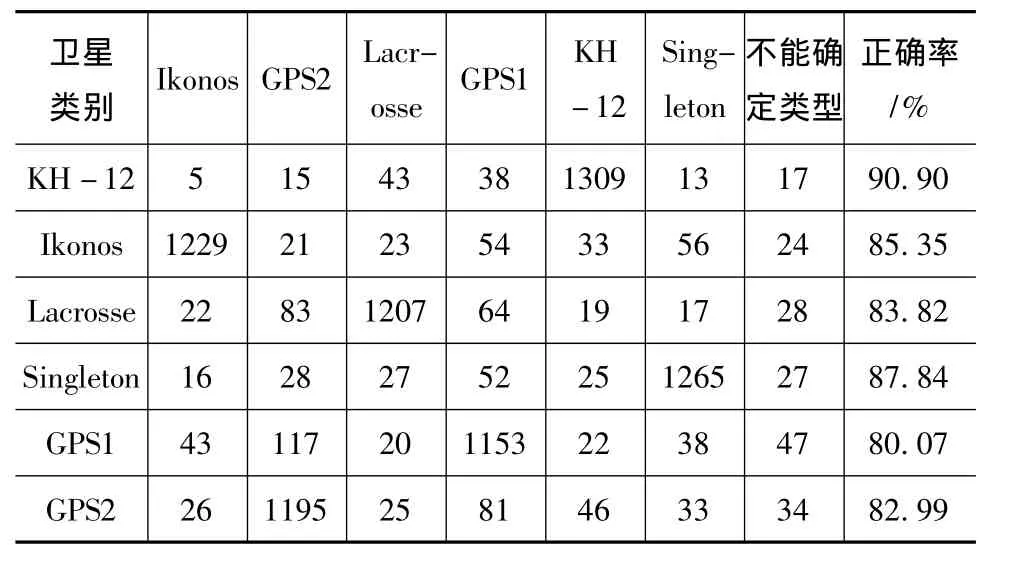
表4 六个卫星目标的识别结果
从实验结果可以看出,结合粗糙集的集成神经网络方法能够对激光图像实现有效地目标识别,识别正确率保持在80%以上。
分析识别错误的原因,主要有:(1)同一个三维目标由于成像角度不同得到的激光图像中目标的形状差别可能较大,而不同目标在某些角度成像又很类似,用同一组特征向量对图像实现精准的分类比较困难的。(2)由于每一个三维目标都生成了大量的多视点特性图像,使得训练样本随之增加,大量的训练样本导致网络泛化误差增大,可能导致输出结果错误。(3)对激光图像进行处理时,由于去噪和分割算法的影响,使得到的目标二值化图像特征发生了变化,与训练样本图像特征不一致,导致识别错误。
在原始数据中,随机选取90%的数据作为训练集,剩余10%作为测试集。比较普通的径向基神经网络、结合粗糙集的集成径向基神经网络这两种方法的计算时间和识别率,结果如表5所示。直接采用径向基神经网络识别方法,选取的特征没有经过约简,数目众多,使得计算时间较长,识别率偏低;集成抗噪粗糙集的径向基神经网络比未结合粗糙集的网络来说,收敛得更快,训练时间更短,计算速度比改进前也有了明显提高,识别准确率也更高。

表5 几种识别方法比较结果
6 结论
本文将粗糙集与集成神经网络结合用于激光图像的三维目标识别,充分利用了粗糙集对目标特征进行优选和神经网络具有容错、自组织能力的优势。通过去噪分割后提取包含几何特征、Hu不变矩特征、仿射不变矩特征及小波矩特征的17个特征,并采用粗糙集算法从17个特征中筛选出5个特征属性,与径向基神经网络结合实现了对激光图像目标的有效识别,识别正确率保持在80%以上,比未结合粗糙集的网络来说,收敛得更快,训练时间更短,能够有效提高激光图像目标的识别速度与效率,具有较强的现实意义。
[1] ZHANG Tianxu.Imaging automatic target recognition[M].Wuhan:Hubei Science and Technology Press,2005:10 -15.(in Chinese)张天序.成像自动目标识别[M].武汉:湖北科学技术出版社,2005:10-15.
[2] YANG Fugang,SUN Tongjing,PANG Qingle.Rough set based dim small target detection method in infrared image sequences[J].Infrared and Laser Engineering,2007,36(5):747 -750.(in Chinese)杨福刚,孙同景,庞清乐.基于粗糙集的红外弱小目标检测方法[J].红外与激光工程,2007,36(5):747-750.
[3] ZHENG Dezhong,SUN Tao.Improved algorithm of neural network using in non-uniformity correction[J].Laser &Infrared,2010,40(10):1111 -1114.(in Chinese)郑德忠,孙涛.应用于非均匀性校正的改进的神经网络算法[J].激光与红外,2010,40(10):1111 -1114.
[4] LI Yibo,QI Wanxu.Novel recognition algorithm forIR mobile target[J].Laser & Infrared,2013,43(3):324 -327.(in Chinese)李一波,齐万旭.一种新的红外机动目标识别算法[J].激光与红外,2013,43(3):324 -327.
[5] ZHANG Dongbo.Rough neural network ensemble method and its application to pattern recognition[D].Changsha:Hunan University,2007:60 -79.(in Chinese)张东波.粗集神经网络集成方法及其在模式识别中的应用[D].长沙:湖南大学,2007:60-79.
[6] LI Yingchun,DU Yonghong.Laser active Imaging simulation method based on the object Model[J].Journal of the Academy of Equipment Command & Technology,2011,22(5):74 -77.(in Chinese)李迎春,杜永红.基于目标模型的激光主动成像仿真[J].装备指挥技术学院学报,2011,22(5):74 -77.
[7] LI Yinhua,LU Xinhui.Improved adaptive median filtering algorithm in image processing applications[J].Journal of Zhengzhou Institute of Light Industry,2009,24(1):83 -86.(in Chinese)李银华,路新惠.改进型自适应中值滤波算法在图像处理中的应用[J].郑州轻工业学院学报.2009,24(1):83-86.
[8] ZHAO Ruizhen,HU Zhanyi.Solar radio burst textured image in wavelet NeighShrink elimination method[J].Spectroscopy and Spectral Analysis,2007,27(1):198 -201.(in Chinese)赵瑞珍,胡占义.太阳射电爆发中图像网纹消除的小波NeighShrink方法[J].光谱学与光谱分析,2007,27(1):198-201.
[9] FAN Jia.Target recognition based laser imaging satellites[D].Beijing:Academy of Equipment Command& Technology,2009:35 -39.(in Chinese)樊佳.基于激光成像的卫星目标识别方法[D].北京:装备指挥技术学院,2009:35-39.
[10] HU Wei.Feature space-based 3D object recognition method[D].Wuhan:Huazhong University of Science and Technology,2004:43 -50.(in Chinese)胡薇.基于特征空间的3D目标识别方法研究[D].武汉:华中科技大学,2004:43-50.
[11] WANG Guoyin.Rough set theory and knowledge acquisition[M].Xi’an:Xi’an Jiaotong University Press,2001:57 -82.(in Chinese)王国胤.Rough集理论与知识获取[M].西安:西安交通大学出版社,2001:57-82.
[12] WANG Zhijun.Rough set rules minimalist approach in pattern recognition [J].MicrocomputerApplications,2009,30(5):1 -4.(in Chinese)王智君.粗糙集规则简约的方法在模式识别中的应用[J].微计算机应用.2009,30(5):1 -4.
[13] LI Yingchun,ZHU Shibin,YANG sheng.Quick recognition and relative minimum distances filtering recognition based on noisy-robust rough Set[C].The 2nd International Conference on Information Technology and Computer Science,Kiev,Ukraine,2010:73 -77.
