基于块处理的直线型标志符高精度轮廓提取技术研究
2014-01-21家建奎
家建奎 ,齐 敏 ,李 珂
(1.西北工业大学 电子信息学院,陕西 西安 710129;2.西北工业大学 自动化学院,陕西 西安 710129)
随着近年来电子信息产业的迅速发展,表面贴装技术(Surface Mount Technology,SMT)产业由于其高密度、焊点缺陷率低、生产流程易实现自动化等优点得到了快速的增长。在SMT生产中,通常会在印刷电路板(Printed Circuit Board,PCB)的对角位置设置两个定位标志符,作为后续的定位标准[1]。因此,标志符的精确识别将直接影响到整个设备定位的准确性。通常标志符有许多形状,比如圆形和直线型的正方形、三角形、十字形等,其中直线型的标识符研究较少。为了精确地检测识别标志符,需要对标志符进行边缘拟合,实际中由于多种因素的影响,直线型标识符被高像素的相机拍摄出来的图像边缘并不很直,拐角处的直角也带有一定的弧度,这会影响到后续的标志符高精度定位,因此,有必要对PCB中的标志符做进一步的边缘拟合,使得其成为标准的正方形、十字形。
常见的直线边缘拟合方法有Hough变换[2-3]、最小二乘拟合[4]、矩形模板[5]等。Hough变换检测直线应用十分广泛,具有抗噪声能力强,连接共线短直线的优点,但是检测出来的直线段数目众多,分布密集,很容易将属于不同直线的点误认为属于同一直线,结果很不理想。最小二乘拟合直线的方法是最常用的直线拟合,该方法将边缘像素提取出来并组成列表,然后对该列表进行直线段拟合,其中tolerance为偏离直线的最大距离,当超过该距离后,直线段就会一分为二。这种方法通常存在着两个问题:1)结果受阈值选取的影响较大,对阈值的依赖性较强。2)当对不同的标志符进行处理时,由于不同形状的目标对拟合的tolerance要求不同,导致所得结果不理想。矩形模板的方法只针对矩形目标有效,具有很强的局限性。当目标为十字形,或者由两个矩形块拼接而成时,矩形模板都无法得到准确的结果。
因此,针对PCB板中形状为正方形、十字形和正方形拼接的标志符,本文首先利用阈值分割、边缘检测等方法提取出PCB图像中标志符的二值图像,接着利用Hough变换检测出目标形状的主轴,最后利用块处理方法对提取出的标志符区域进行直线化处理,该方法在有效避免阈值选取的同时,保证了最终提取出的标志符轮廓具有边缘直线性和直角特性。
1 Hough变换检测标志符的主轴
针对标准Hough变换[6]中计算量大,占用内存多等缺点,Galamhos等[7]提出了一种改进的概率霍夫变换,这种方法将图像数据映射到参数空间中具有较大概率的单元块,而非所有的单元块,因此大大减少了投票数,提高了编程效率。具体的概率霍夫变换算法如下:
1)检查输入图像,如果是空的就退出程序。
2)从输入图像中随机选取一个像素,更新累加器。
3)将选取的像素从输入图像中移除。
4)检查累加器中的峰值是否因为新像素而超过了阈值l,如果没有就返回步骤1)。
5)根据累加器中的峰值确定直线方向,并找到该方向上的最长直线段,这里的直线段
包括了连续的和间隔不超过给定阈值的不连续直线。
6)将上一步中得到的直线段像素从输入图像中移除。
7)将步骤5)中得到的直线段像素对应的累加器全部置零。
8)如果直线段长度大于允许的最小长度,则将其加入输出列表中。
9)返回到步骤 1)。
在本文中,利用改进的概率霍夫变换检测出PCB板上的标志符的主轴,即利用霍夫变换检测出的最长直线段。如图1所示,直线段l表示检测出的正方形标志符主轴。
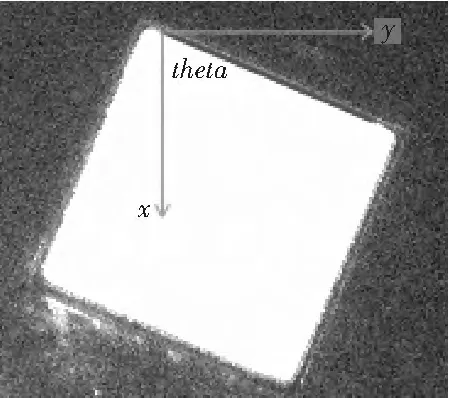
图1 主轴l与x轴夹角thetaFig.1 The angle theta between domain line l and x axis
2 利用块处理方法对标志符区域进行直线化处理
对于十字形、正方形和由正方形拼接的标志符而言,它们的边缘都是直线,角度都是直角,根据这样的特点,本文提出了块处理的方法,将标志符区域划分为许多小块的区域,根据小块中标志符区域所占的比重,确定小块是否属于标志符区域。
在图1中,设theta角为标志符区域主轴l与图像坐标系中x轴正方向的夹角,单位为度。以主轴一端为定点,将目标区域轮廓旋转至主轴与图像坐标系的坐标轴平行,当时,将标志符区域轮廓旋转至主轴与图像坐标系的x轴平行;当时,将标志符区域轮廓旋转至主轴与图像坐标系的y轴平行。具体的坐标变换公式如下:
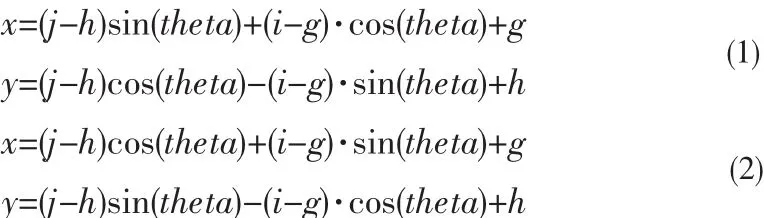
经过上述步骤之后,我们得到了标志符区域的正视图,即标志符边缘处于平行或垂直的方向。如图2所示。
图2 标志符区域被分割为许多unit单元块。Fig.2 The mark region divided by unit
将上一步中得到的标志符区域以x,y轴为边等间隔分块,如图2所示,间隔为7*7个像素(具体大小值根据拍摄图像而定)。每一个分块定义为一个单元块unit,期间要保证区域的4个边界都与建筑物区域的轮廓相切,避免最后的图像尺寸发生改变。
在图2中,由上到下,至左而右逐行扫描各单元块,计算各单元块中标志符区域的面积与单元块面积的比值:

其中,Amark是单元块中标志符区域的面积,Aunit为单元块的面积,面积单位均为像素个数。
当Percentage大于等于0.45时,填充该单元块为标志符区域。否则填充该单元块为背景颜色。扫描结束后,最后保留的所有单元块组成了完整的标志符区域,跟踪区域的边缘就可以得到直线化的标志符轮廓。
处理完成之后,将得到的直线化轮廓图以主轴的定点为圆心,旋转-theta角度调整回原始位置,就可以得到待识别[8]的标志符区域的直线化轮廓图。该方法不仅对正方形的标志符有效,对十字形和多正方形拼接的标志符也同样起作用。
3 试验结果与分析
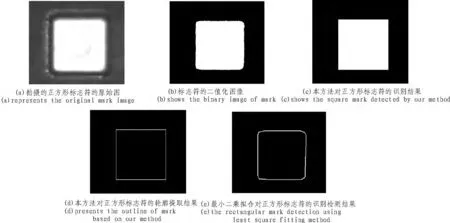
图3 正方形标志符原始图及其识别检测结果Fig.3 Square mark original picture and its detection result
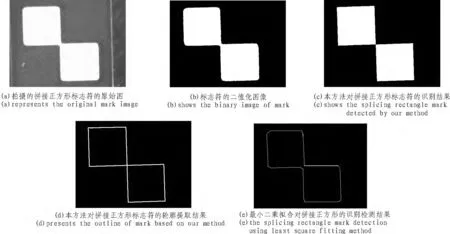
图4 拼接正方形标志符原始图及其识别检测结果Fig.4 Splicing rectangle mark original picture and its detection result
本文针对PCB板上的正方形、十字形标志符进行了轮廓提取试验,并与利用最小二乘法拟合后的标志符做了对比。图3~图5分别是正方形、拼接正方形、十字形标志符的原始图像与对应的轮廓提取结果图。从中可以看出,本方法提取出的正方形标志符区域在边缘区域具有直线的特性,并且在容易失真的角度区域具有直角的特性,完全符合实际的正方形标志符。相反,利用最小二乘拟合对标志符轮廓提取的结果显示边缘由多个线段连接组成,更重要的是在标志符轮廓的角度区域并非是直角,而是由多条线段组成的钝角,这些与实际的标志符有很大的失真,因此,本文提出的方法具有更高的精确度。
4 结论
本文针对现有识别检测正方形、拼接正方形、十字形标志符的方法的不足,提出了一种新的直线化的标志符轮廓精确提取算法。该方法首先将PCB板上的标志符标记图像由灰度图转化为二值图,然后利用改进的概率霍夫变换检测出标志符区域的主轴,最后使用块处理的方法对标志符区域进行了直线化轮廓提取。本方法有效的避免了传统最小二值拟合方法中的阈值选取问题,同时也解决了边缘夹角区域的直角化和轮廓边缘的直线化的问题,有利于标志符的高精度定位。本方法不仅针对正方形的标志符有效,对其他的具有直角特性的多边形PCB标志符同样有效。
[1]熊光洁,马树元,刘瑞祯.PCB检测中圆Mark的快速精确定位[J].计算机工程,2012,11(21):211-213.XIONG Guang-jie,MA Shu-yuan,LIU Rui-zhen.Fast precise positioning of circular mark in PCB inspection[J].Computer Engineering,2012,11(21):211-213.
[2]张广斌,束洪春,于继来.基于Hough变换直线检测的行波波头标定[J].中国电机工程学报,2013,19(6):165-173.ZHANG An-bin,SHU Hong-chun,YU Ji-lai.Surge identification for travelling wave based on straight lines detection via hough transform[J].Proceedings of the CSEE,2013,19(6):165-173.
[3]张江鑫,沈小兰,王辉,等.快速随机Hough变换多直线检测算法[J].浙江工业大学学报,2013(3):346-350.ZHANG Jiang-xin,SHEN Xiao-lan,WANG Hui,et al.Fast multi-line detection algorithm using randomized hough transform [J].Journal of Zhejiang University of Technology(Social Science),2013(3):346-350.
[4]范文博,王文龙,陈岳龙,等.最小二乘直线拟合方法及其在同位素地质年代学中的应用研究 [J].地质论评,2013(5):801-815.FAN Wen-bo,WANG Wen-long,CHEN Yue-long,et al.Methods for least squares fitting of a straight line and their application in geochronology[J].Geological Review,2013(5):801-815.
[5]崔世勇.高分辨率遥感影像建筑物半自动提取方法研究[D].北京:中国测绘科学研究院,2009.
[6]HOUGH P C.Machine analysis of bubble chamber pictures[C]//Proc.Int.Conf.High Energy Accelerators and Inst,1959(55):554-558.
[7]GALAMHOS C,MATAS J,KITTLER J.Progressive probabilistic Hough transform for line detection[C]//Computer Vision and Pattern Recognition,1999.Los Alamitos:IEEE Computer Society,1999:554-560.
[8]张蒙正,马杰.幂律型流体射流破碎建模和实验问题探讨[J].火箭推进,2011(4):1-6,41.Zhang Meng-zheng,Ma Jie.Discussion about modeling and experiment problem of power-law fluids[J].Journal of Rocket Propulsion,2011(4):1-6,41.
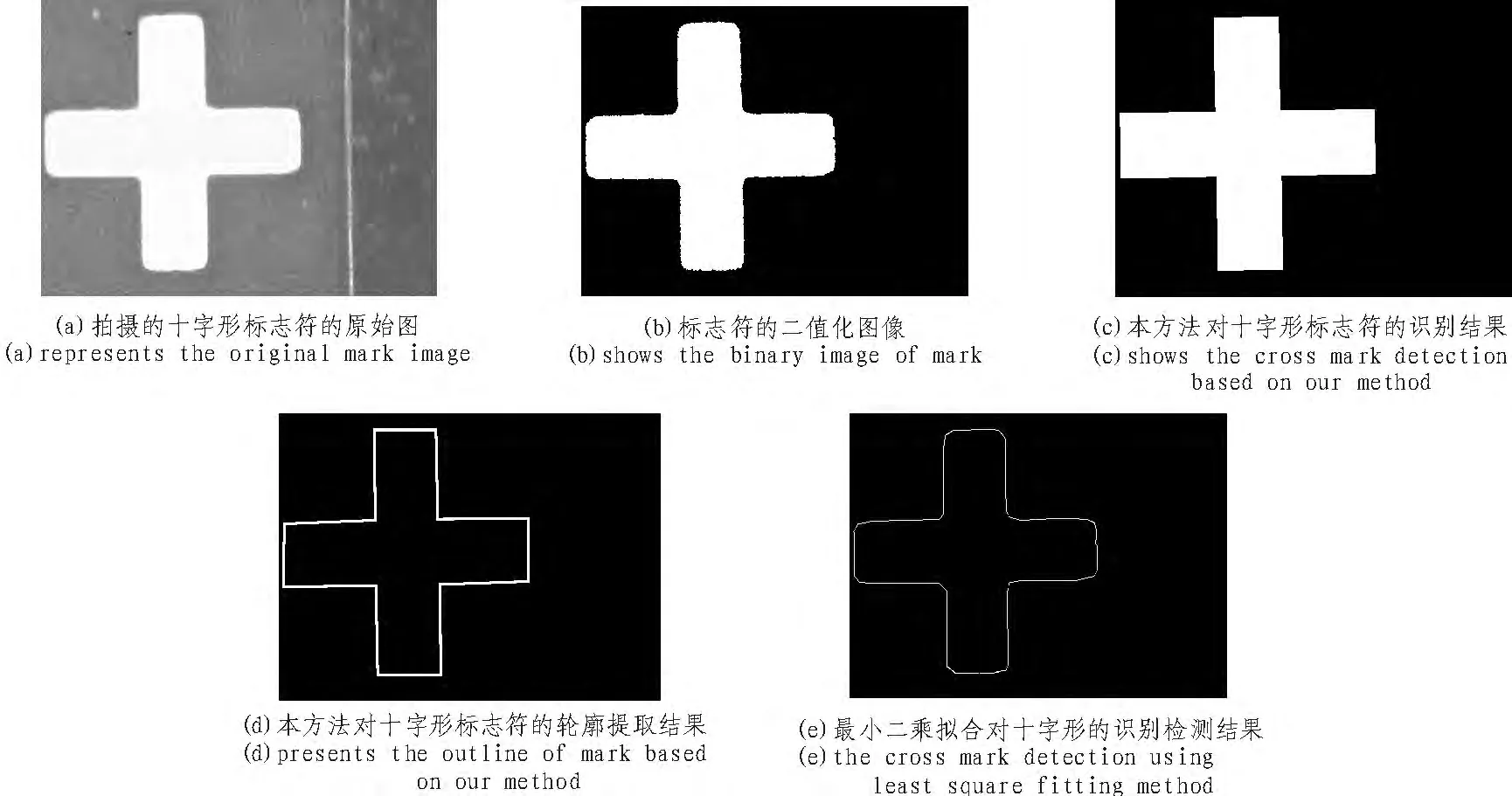
图5 十字形标志符原始图及其识别检测结果Fig.5 Cross mark original picture and its detection result