一种水声信号的模拟研究和检测
2014-01-21高貂林
彭 华,高貂林
(西北工业大学 陕西 西安 710000)
由于海洋声场及其复杂多变,受温度、盐度、梯度、水流、水域、季节、气候、风浪、温层、流层、界面的反射与折射等诸多因素的影响,使水声信道相当复杂,接收信号通常会畸变,并淹没在噪声之中值[1]。对水下目标进行实时、准确、快速、精确地检测和参数估计是水下定位系统不断追求的目标。声信标的最终目是发射同步的抗干扰能力强的信号及对目标进行检测、估计、跟踪,对接收信号进行一定的处理、提取特征、分析识别,以检测目标的存在与否,进而通过对信号的处理与运算估计出目标的方位、距离,实现定位和跟踪。对于水下目标的检测和参数估计有两种方式[2]:一是对海洋声场进行监测,从接收信号中提取目标辐射噪声并进行识别和参数估计 (即被动方式);二是由声信标发射给定的序列信号,并对接收的回波信号进行检测与参量估计。声信标为主动方式。信标的信号机制不仅决定信号处理方法,而且直接影响系统的分辨力、参数测量精度、抑制混响及抗干扰和与水声信道匹配等方面的性能。因此,水声信号的信号体制有很重要的作用。
可见,信号体制的确定要考虑到以上提到的复杂的海洋环境的影响。本文提出了一种水声信号机制,并且给出该水声信号的检测方法。实验证明,该检测方法有效。
1 水声信号机制
本课题跟踪系统为同步主动跟踪系统,同步周期为2 s。被跟踪目标上声信标在每个同步周期内发射4组信号,即每间隔0.5 s发射一组信号。首先发射1组帧信号,其次为3组行信号。帧信号由单频脉冲信号(CW)和正调频脉冲信号(+LFM)组成,行信号由单频脉冲信号(CW)和负调频脉冲信号(-LFM)组成。帧信号与行信号均为双脉冲,如图1所示。

图1 合作声信标发射信号机制图Fig.1 Acoustic emission signal beacon cooperation mechanism map
此信号为2 s同步时钟信号,在每个同步周期的零点发射帧同步信号,0.5 s后发射一组行信号,连续发射三组行信号。帧信号和三组行信号的间隔均为0.5 s。CW脉冲即单频脉冲信号,为测距脉冲,根据水听器基阵所接收的CW信号的前沿与2 s同步时钟的时间间隔,即可确定目标的时延,也就确定了目标的距离信息。LFM脉冲即线性调频脉冲,为测深脉冲,LFM脉冲与CW脉冲之间的时间间隔在40.96 ms和81.92 ms之间,反映了目标的深度信息。帧信号由CW脉冲与+LFM脉冲组合而成,行信号由CW脉冲与-LFM脉冲组合而成,两种不同的组合可以区分帧信号和行信号,四组信号的组合可以有效的反应距离信息和深度信息。
2 海洋水声信道的影响
在经过海洋水声信道传播的过程中,声波的能量会随着传播距离的增加而按照一定的规律逐渐减弱,在传播距离增大到一定程度后,声波的能量会降低到某个阈值以下,以致接收不到信号。多径效应是制约各类信息系统在海洋中应用的一个严重问题。它会引起信号的时间扩展和信道的频率选择性衰减,并且使得接收信号的幅度和相位发生起伏变化,导致信号的畸变,造成码间串扰。同时,海洋水声信道中严重的多普勒效应是影响海洋信息传输工作性能的主因之一,其会导致信号的频率和相位产生偏移,从而降低整个系统的信息传输质量。

图2 水声信号及频域波形Fig.2 Underwater acoustic signal and the frequency-domain waveform
以上仿真图表明在海洋水声信道中信号的包络会发生变化,但对于单脉冲信号(CW波形)来说,频域的变化不大,所以通过接受到的CW波形与同步时钟的时延差可以测得距离信息。
3 信号的检测方法
本系统对CW脉冲的检测采用基于频谱分析的方法。为了充分提取CW脉冲信号的频谱信息,FFT的点数取为10 ms*fs,其中fs为采样频率。对于本系统,fs=409.6 k,每次运算的点数即为N=1 096点。对采样数据进行FFT的流程如图4所示。采用这种处理方式,可以保证一个CW脉冲全部包含在某次进行FFT处理的数据段中。当然,即使在前一个10 ms的数据段检测出CW信号,该数据段也可能只是包含CW脉冲信号的一部分。但采用这种处理方式,可以提高信号检测时的判别门限,降低虚警概率。
每次做完FFT后,在有效的频带内寻找五个最大谱峰,并存储它们的幅度值。在五个最大峰值中挑选最大的一个,当它的值大于设定门限,并且大于其他四个谱峰和的1.5倍(符合单频信号频谱特征)时,初步判定该段数据包含有CW信号。另外,在进行时延估计时,根据所计算的信号包络,还要进行鉴宽、鉴幅处理,以避免单纯利用频谱分析方法判断所造成的“虚警”现象。
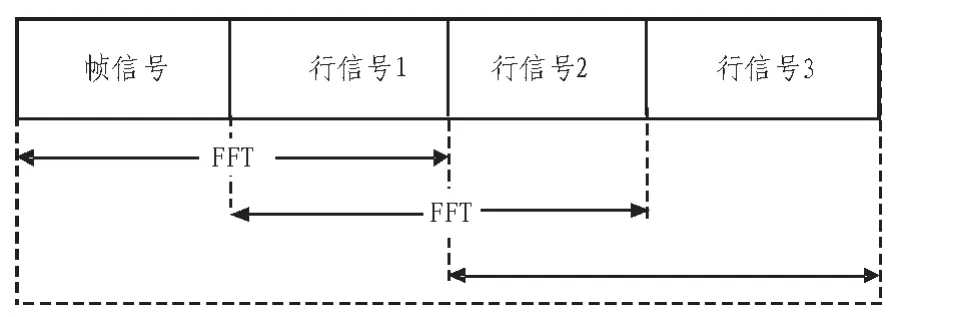
图3 对信号做FFT处理流程Fig.3 Do FFT signal processing
根据CW信号检测时所估计的信号中心频率,利用公式(1)和式(2)可以实时生成LFM信号的样本。

式中,f0为信号中心频率,fs为采样频率,Δf为信号频率变化范围的1/2,ΔT为信号时宽的1/2,n对应各个样本点。对于本系统,LFM信号的宽度为5 ms,fs=409.6 k,因此n的取值范围为[0,2047]。
在得到LFM信号的样本后,相当于输入信号已知,因此对于测深信号的检测,采用匹配滤波器来完成。匹配滤波器可以用副本相关器来实现,在有限的观测时间T内,相关器输出

其中,T 为观测时间,x(t)为基阵接收信号,s(t)为参考信号。当接收信号中含有目标信号,并且τ等于目标信号时延τ0时,相关器输出为最大值[3]。
对于离散时间信号,相关器输出可以表示为

其中,N为观测时间所对应的采样点数,x(n)为基阵接收信号,s(n)为参考信号。当接收信号中含有目标信号,并且k所对应的延时k/fs等于目标时延τ0时,相关器输出为最大值。
本系统中的副本相关器在数字域来实现,它有时域和频域两种实现方法[4]。分别如图5所示。
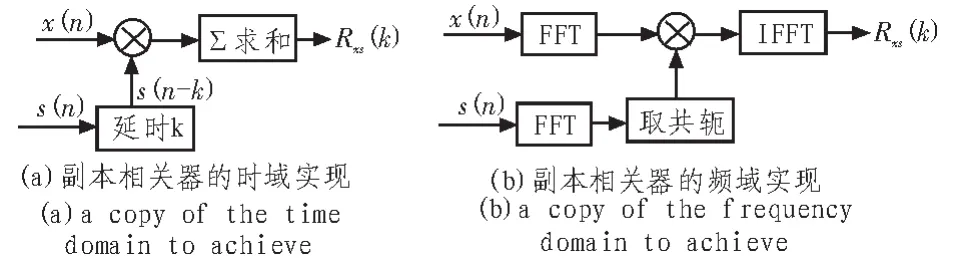
图4 副本相关器的实现方法Fig.4 Replica correlator method
对于如式(4)和图5(a)所示的时域实现方法,为了实现在时间上的细扫,全部计算量与N2是成正比的;而对于频域实现方法,FFT的计算量与Nlog2成正比[5]。本系统观测时间取为10 ms,对应N为4 096点,显然采用频域实现方法运算量更小,更有效。
对于式(4),可以表示为 x(n)与 s(n)卷积形式

对式两端做DFT[6]

利用 FFT 可以快速计算式(6),再将 Gxs(ejω)进行 IFFT 即可即可得到相关器输出,计算流程如图5(b)所示。计算副本相关器在观测时间内的输出最大值,通过设定合适的检测门限,即可判定信号的有无。
4 信号检测仿真结果
对水声信号进行Matlab仿真,结果如图6所示。图中左边为基阵接收的CW、+LFM、-LFM脉冲信号波形,右边为利用正交解调方法所求解的幅度包络。从图5可以看出,利用正交解调方法求得的幅度包络和实际信号包络取得了很好的一致,这点在图6中体现的更为明显。由于正交解调中所使用的低通滤波器是在数字域利用FIR滤波器来实现的,因此实际信号包络和程序计算的幅度包络之间存在一定的“延时”。在实际系统进行时延估计时,利用对理想信号测试所得的先验知识,可以减去这个固定的“延时”来修正估计结果。
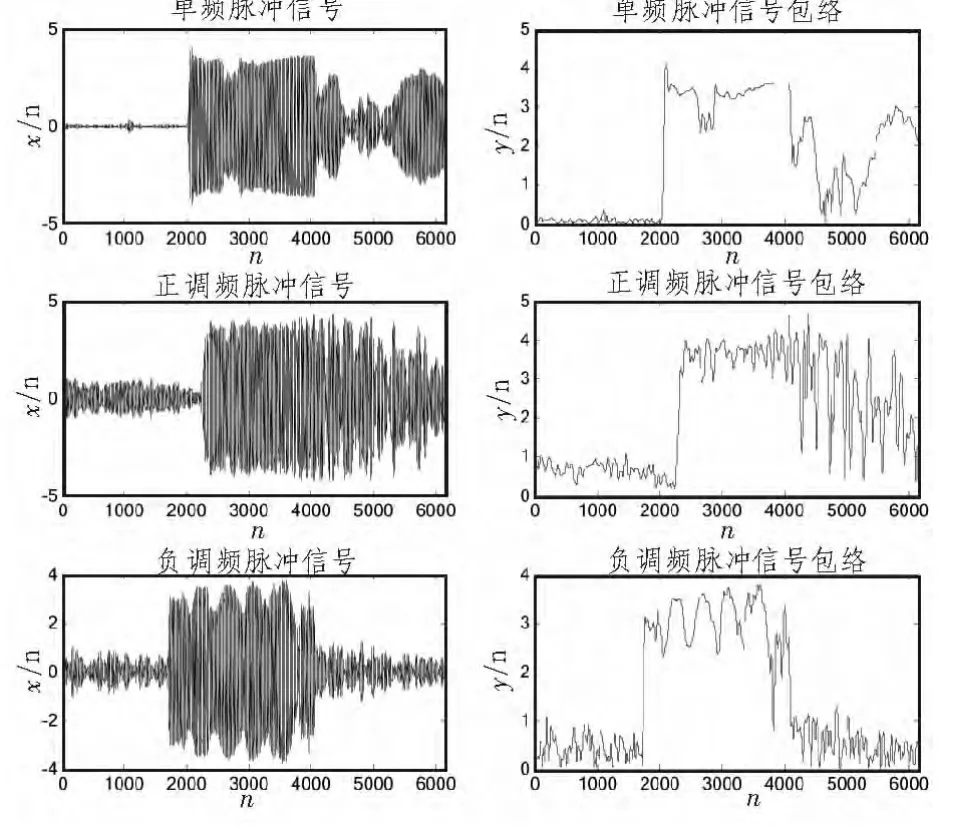
图5 包络检波输出结果1Fig.5 An envelope detection output
5 结 论
海洋水声信号越宽,相干多径效应对信号包络的影响越明显,信号的时延估计将变得更困难。因此,水声信号常采用窄脉宽的信号机制,尽可能避免多径信号的干涉,使得多径信号在时域上能够与发射的脉冲信号分开。另外,测距脉冲与测深脉冲采用不同的信号格式,以避免测距脉冲的多径效应对测深脉冲检测的影响。此信号机制采用5 ms的发射脉冲宽度,测距脉冲采用CW信号,测深脉冲采用LFM信号。可以有效分隔开时域上的多径信号由于测深脉冲采用与测距脉冲不同的LFM信号,而且两个脉冲之间的时间间隔满足先验条件(40.96 ms~-81.92 ms 之间),因此 CW 脉冲的多径效应对LFM脉冲的检测影响不大。
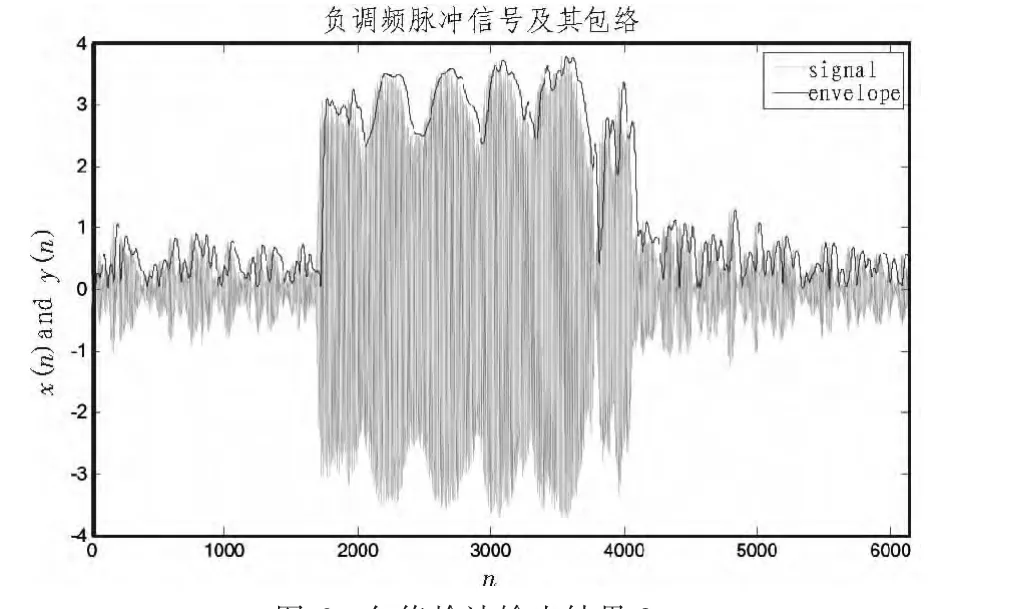
图6 包络检波输出结果2Fig.6 Envelope detector output 2
[1]陈洁丽.多普勒频移环境下的水声信号检测 [D].广州:华南理工大学,2012.
[2]许志恒.水声主被动定位系统声信标设计[D].哈尔滨:哈尔滨工程大学,2008.
[3]解伟,张晓斌,张朋松,等.飞机电源控制器PCU测试仪的设计与实现[J].计算机测量与控制,2010,18(9)2207-2209.XIE Wei,ZHANG Xiao-bin,ZHANG Peng-song,et al.Design of tester system for power control Unit (PCU)[J].Computer Measurement&Control,2010,18(9)2207-2209.
[4]王建新,杨世凤,隋美丽,等.Labwindows/CVI测试技术及工程应用[M].北京:化学工业出版社,2006.
[5]周承仙,李仰军,武锦辉,等.基于Labwindows/CVI的多路高速数据采集系统设计[J].电子测量技术,2007,30(12):66-69.ZHOU Cheng-xian,LI Yang-jun,WU Jin-hui,et al.Design for multi-channel high speed data acquisition system based on Labwindows/CVI[J].Electronic Measurement Technology,2007,30(12):66-69.
[6]关萍萍,翟正军,姜红梅,等.基于LabWindows/CVI测控系统通用报表的设计与实现[J].计算机工程与设计,2010,31(1):203-205.GUAN Ping-ping,ZHAI Zheng-jun,JIANG Hong-mei,et al.Design and implementation of universal control system report based on Labwindows/CVI[J].Computer Engineering and Design,2010,31(1):203-205.