空间智能操控装备在轨服务建模与仿真研究
2014-01-19张学波于小红张智海
张学波, 于小红, 张智海
(1.装备学院研究生管理大队,北京101416; 2.装备学院航天指挥系,北京101416)
空间智能操控装备在轨服务建模与仿真研究
张学波1, 于小红2, 张智海1
(1.装备学院研究生管理大队,北京101416; 2.装备学院航天指挥系,北京101416)
为了保证空间智能操控装备在轨服务任务的顺利实施,研究了与其相关的规划、建模与仿真等关键技术。在此基础上,研制开发了一套空间智能操控装备在轨服务仿真系统;该系统采用HLA/RTI仿真框架,实现了空间态势监控、任务规划、轨道机动规划、测控资源计算、轨道机动仿真、在轨操作仿真、控制指令生成与发送等功能。基于该仿真系统,进行了空间智能操控装备在轨服务任务的仿真分析,对关键任务节点进行了反复验证。
空间智能操控装备;在轨服务;任务规划;轨道机动规划
在轨服务是指在空间通过人、机器人或二者协同完成的空间操作,涉及延长各种航天器寿命、提升执行任务能力以及清除轨道垃圾[1]。目前,在轨服务技术正逐渐向无人自主的方向发展。空间智能操控装备是指具有对空间合作或非合作目标进行捕获、跟踪、接近和在轨操作能力,兼有智能自主控制模式或地面遥操作控制模式,能够执行空间主动防护、在轨状态监测和在轨装备保障等多种任务的新型智能航天器。近年来,以美、日、欧等为代表的航天大国纷纷开展空间智能操控装备的研制和试验,主要包括:美国的“轨道快车”[2-3]和“通用轨道修正航天器”、日本的“工程试验卫星”[4]、德国的“实验服务卫星”等。结合高保真空间环境在轨服务任务的前期仿真分析,是空间智能操控装备任务成功与否的重要保证,是提前发现隐患、避免事故的重要手段,也是对其能力进行验证的有效途径,还可对其关键性能指标和效能指标进行评估。为此,本文研制开发了一套空间智能操控装备在轨服务仿真系统,以支持空间智能操控装备在不同任务阶段的仿真分析。
1 仿真系统的设计
通过对空间智能操控装备在轨服务任务流程[5]的分析,将仿真系统划分为8个主要模块:态势监控模块、任务规划模块、轨道机动规划模块、轨道机动仿真模块、在轨操作仿真模块、资源计算模块、指令生成模块和指令发送模块。由于模块之间要高度集成和相互联动,所以高层体系结构HLA(high level agriculture,HLA)是理想的系统架构方案。这里采用MAK RTI(run time interface)3.1作为通信服务的基础软件,同时将各个模块作为仿真系统的基本联邦成员,各成员之间通过RTI基本协议来完成交互[6],系统架构如图1所示。

图1 基于HLA/RTI的空间智能操控装备在轨服务仿真系统架构
根据联邦成员及功能的设置,制定实体类及属性、交互类及参数。主要实体类包括:空间智能操控装备类、目标航天器类、地面测控站类、中继卫星类等(如表1所示)。主要交互类包括:空间目标探测交互类、数据中继交互类、轨道机动规划交互类、飞行任务规划交互类等。此外,还要设置轨道根数、控制命令、速度矢量、位置矢量、载荷参数等复杂数据结构。

表1 主要实体类及属性表
按照人在回路的操作方式,空间智能操控装备的在轨服务任务可以划分为人工在轨操控(如维修哈勃望远镜)、半自主(如日本的“工程试验卫星”)、全自主(如美国的“轨道快车”)3种。对于人工和半自主操控方式,需要对星地延时进行模拟,并进行闭环控制。对于全自主方式,一般可以不需要闭环控制。该仿真推演系统模拟全自主控制方式,即地面进行任务级规划,星上自主进行事件级和指令级规划,并自主完成调度。
2 关键技术分析
空间智能操控装备在轨服务仿真系统主要用到规划、建模和仿真3个方面的关键技术。
2.1 规划技术
规划技术主要涉及空间智能操控装备的任务规划、轨道机动规划和机械臂的路径规划等技术。
2.1.1 基于标称程序的任务规划
空间智能操控装备的任务规划是指在特定的操控约束下,求解完成操作目标的操控活动序列[7]。相对于传统航天器来说,操控任务规划周期更短、活动间隔更紧密、约束关系更复杂、对实时性要求更高。操控任务规划一般包含任务级规划、事件级规划和指令级规划3个层次,此处的任务规划是基于标称程序的任务级层次的规划。标称程序主要描述任务条件(包括任务弧段安排)、任务阶段划分、任务动作及其时序关系等,它首先由相关单位及人员讨论确定,并生成确定的文件形式的资料,再由操作人员录入、编辑、存储,生成电子的、标准描述语言描述的任务程序。
规划设计的任务序列基于相对时间起点等约束条件进行编排,并以可扩展标记语言XML(eX-tensible markup language)语言进行存储,而且能够以甘特图形式进行直观显示。只要将任务的绝对时间注入任务规划程序中代替相对时间约束,就得到了真正规划好的任务序列。利用该任务规划程序进行任务规划,减少了操作人员的工作量,提高了规划的效率,降低了规划误差。
2.1.2 轨道机动规划
轨道机动规划提供了霍曼转移和兰伯特转移2种轨道机动方式[8]。霍曼转移机动方式主要用于共面轨道转移,这种方式所需燃料最省,一般在任务时间约束比较宽裕的情况下采用;兰伯特转移机动方式可以用于共面和异面轨道转移,这种方式是一种快速轨道机动方式,一般在任务时间要求比较紧的情况下采用,但燃料消耗较之霍曼转移要大。轨道机动规划结果一般包括:轨道机动的开始时间和持续时间,在x、y、z 3个方向的轨道机动冲量。
兰伯特共面快速转移情况如图2所示,空间智能操控装备在A点,目标航天器在B点,相位差条件为θ(θ≥30°),转移轨道为A-P-C,近地点为P,需要分别在A点和C点实施2次轨道机动(冲量分别为V1和V2),以实现轨道转移与交会。

图2 共面快速转移示意图
2.1.3 机械臂路径规划技术
根据规划空间的不同可分为笛卡尔空间路径规划和关节空间路径规划。笛卡尔空间路径规划主要是规划出使机械臂能够从起始点沿给定的轨迹到达终止点的关节序列,它又可分为直线路径规划和圆弧路径规划。关节空间路径规划主要实现从一组初始的关节角到达一组期望的关节角的规划,整个规划空间都在关节空间[9]。基于上述规划算法,重点实现了自主路径规划,即视觉测量部件实时获取目标位姿,然后根据实时位姿数据进行路径规划。
2.2 建模技术
由于空间高真空、微重力的特点,机械臂与基座之间存在动力学耦合作用,机械臂的运动会对基座产生干扰,导致基座的位置和姿态发生改变,因此空间智能操控装备的机械臂运动学和动力学建模较常规的固定于地面的机械臂复杂得多,它主要分为2种控制模式,即自由漂浮和自由飞行。在不同的控制模式下,机械臂运动学和动力学的约束关系并不相同。
结合空间机械臂的特点,在2种控制模式下针对空间智能操控装备机械臂的运动学和动力学建模开展研究。根据空间智能操控装备机械手的质量特性和参数,分别建立了在自由漂浮和自由飞行2种模式下的雅克比矩阵;在此基础上,基于旋量理论建立了空间智能操控装备的正向运动学模型和逆向运动学模型;采用牛顿-欧拉递推方法构建了空间智能操控装备的逆向动力学模型,采用拉格朗日方程建立了其正动力学模型;在动力学模型的基础上,建立了空间智能操控装备的控制模型,实现了在不同模式下的控制,例如自由飞行模式下空间智能操控装备的协同控制模型如图3所示。最后,对空间智能操控装备目标操作过程中的碰撞检测进行研究,建立了目标操作过程中的碰撞动力学模型。
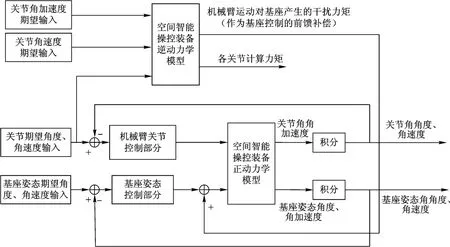
图3 自由飞行模式下空间智能操控装备的协同控制模型
2.3 仿真技术
仿真技术主要涉及基于卫星仿真工具STK (satellite toolkit)的轨道机动仿真和基于Orbiter的在轨操作仿真技术。
2.3.1 基于STK的轨道机动仿真
为方便空间智能操控装备仿真系统的空间场景显示与分析,仿真系统的多组联邦成员中都嵌入了Connect、VO和Astrogator等模块。其中, Connect模块是STK与外部工具连接所用的重要桥梁,它提供了用户在应用程序中调用STK的功能;VO模块以控件形式提供用户使用,利用该控件对象调用Connect模块的各种操作命令可以进行相关的仿真分析,并且其仿真过程将以三维立体和二维星下点形式显示在VO控件表面; Astrogator模块是STK的机动模块,它根据空间智能操控装备的初始轨道、轨道机动类型、时机和冲量各分量大小等输入参数,计算其转移轨道,并能够仿真演示其轨道转移情况[10]。
2.3.2 基于Orbiter的在轨操作仿真
在轨操作仿真是基于Orbiter设计实现的,它是由英国伦敦大学研制开发的一套基于牛顿力学的、免费的、实时空间飞行模拟和可视化软件[11]。基于Orbiter进行空间环境与空间智能操控装备的三维可视化建模与仿真需要如下几个步骤:① 建立空间智能操控装备的三维可视化模型;②配置其物理参数;③为空间智能操控装备的三维可视化模型添加纹理(可选);④设计空间智能操控装备的空间飞行场景;⑤ 进行空间智能操控装备的功能行为建模,描述空间智能操控装备的功能行为。
3 在轨服务任务的仿真分析
3.1 快速轨道机动仿真
轨道机动是进行在轨服务任务的前提,即空间智能操控装备从待机轨道出发,通过一系列的轨道转移与目标航天器交会。该过程需要空间智能操控装备与空间目标监视系统、指挥控制中心、地面测控通信系统、卫星导航系统等多个复杂大系统的信息交互与协同。对这一阶段的仿真分析,有助于从体系角度构筑和完善在轨服务装备体系,发现体系内部的缺陷和短板。此外,还可以对空间智能操控装备的轨道机动能力进行验证与评估。
这里假定空间智能操控装备的初始待机轨道与目标航天器共面。空间智能操控装备采用快速轨道机动方式接近目标航天器,直至成功交会。对于共面快速轨道机动,设空间智能操控装备轨道参数分别为半长轴8 163 km、偏心率0、轨道倾角98.5°、升交点赤经0、近地点幅角0;而目标航天器轨道参数分别为半长轴10 163 km、偏心率0、轨道倾角98.5°、升交点赤经0、近地点幅角0。空间智能操控装备的相位为平近点角180°,目标航天器的相位为平近点角190°,参考时刻为2007-07-01T12:00:00。经过计算,需要实施2次轨道机动,所需的冲量、开始时间及持续时间,如表2所示。

表2 共面快速机动冲量数据表
基于STK的Connect、VO和Astrogator等模块,空间智能操控装备相对目标航天器的快速轨道机动仿真效果如图4所示。
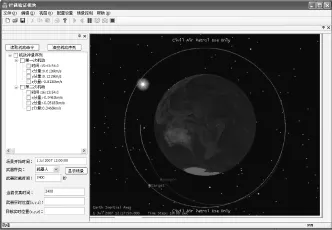
图4 快速轨道机动仿真效果
3.2 在轨抓捕任务仿真
经过轨道机动与目标航天器实现交会之后,空间智能操控装备要利用机械手对目标实施抓捕和对接。该过程是空间智能操控装备实施在轨服务的前提和基础,也是空间智能操控装备在轨服务过程中最容易发生事故并导致任务失败的阶段。对这一任务阶段的仿真推演是提前发现隐患、避免事故发生的重要手段。为此,我们对各种外部条件(如太阳光照对相机的影响)和相对位姿情况下的在轨抓捕进行了仿真推演(如图5所示),得到了空间智能操控装备对目标航天器实施在轨抓捕的合理位姿空间。

图5 在轨抓捕过程仿真效果
4 结束语
在未来的空间开发利用中,空间智能操控装备将扮演十分重要的角色。对空间智能操控装备在轨服务任务的仿真分析,是保障其顺利实施的关键。本文研制开发的空间智能操控装备在轨服务仿真系统,能够支撑空间智能操控装备空间运行与在轨操作的全过程仿真推演,对于深入研究空间智能操控装备的在轨服务应用具有重要意义。
References)
[1]梁斌,杜晓东,李成,等.空间机器人非合作航天器在轨服务研究进展[J].机器人,2012,34(2):242-256.
[2]FRIEND R B.Orbital express program summary and mission overview[C]//HOWARD R T,MOTAGHEDI P.Sensors and Systems for Space Applications II.Orlando FL:The International Society for Optical Engineering,2008.
[3]CARPENTER J R.A Summary of the rendezvous,proximity operations,docking,and undocking(RPODU)lessons learned from the defense advanced research project agency(DARPA)orbital express(OE)demonstration system mission [EB/OL].[2013-02-19].http://www.nasa.gov/externalflash/dart/Resources/Rendezvous%20Proximity% 20Operations%20Docking%20and%20Undocking% 20Lessons%20Learned.pdf.
[4]ODA M,KIBE K,YAMATATA F.ETS-VII space robot inorbit experiment satellite[C]//IEEE.Robotics and Automation,1996.Proceedings,1996 IEEE International Conference on.IEEE,1996:739-744.
[5]YOSHIDA K,HASHIZUME K,NENCHEV D N,et al. Control of a space manipulator for autonomous target capture-ETS-VII flight experiments and analysis[C]//AIAA Guidance,Navigation,and Control Conference,2000:14-17.
[6]王怀晓,刘建永,陆莺,等.基于HLA的分布式作战实体对抗视景仿真[J].计算机应用,2011,31(A01):163-164.
[7]GHALLAB M,NAU D,TRAVERSO P.自动规划:理论与实践[M].姜云飞,译.北京:清华大学出版社,2006:125-136.
[8]梁金登,李东旭.空天飞行器轨道拦截策略研究[J].弹箭与制导学报,2008(5):165-168.
[9]陈小前,袁建平,姚雯,等.航天器在轨服务技术[M].北京:中国宇航出版社,2009:358-399.
[10]张雅声.掌握和精通卫星工具箱STK[M].北京:国防工业出版社,2011:56-68.
[11]SCHWEIGER M.Orbiter space flight simulator user manual[EB/OL].(2006-04-19)[2013-02-19].http://www.orbitersim.com.
(编辑:李江涛)
The Modeling and Simulation Research of the Space lntelligent Operation Equipment's ln-orbit Service
ZHANG Xuebo1, YU Xiaohong2, ZHANG Zhihai1
(1.Department of Graduate Management,Equipment Academy,Beijing 101416,China; 2.Department of Space Command,Equipment Academy,Beijing 101416,China)
For the implementation of the space intelligent operation equipment's in-orbit service task,the relevant plan,modeling and simulation technology are researched in this paper.Based on the research,a simulation system for the space intelligent operation equipment's in-orbit service task is developed,which adopts HLA/RTI simulation frame,and which mainly includes some functions such as space situation surveillance,mission plan,orbit maneuver plan,measure and control resource computing,orbit maneuver simulation,in-orbit operation simulation,control instruction generation and sending.Based on the simulation system,the space intelligent operation equipment's in-orbit service task is analyzed.
space intelligent operation equipment;in-orbit service;mission plan;orbit maneuver plan
G 353.12
2095-3828(2014)02-0047-05
ADOI10.3783/j.issn.2095-3828.2014.02.012
2013-09-16
部委级资助项目
张学波(1977-),男,讲师,博士研究生.主要研究方向:需求论证,系统建模与仿真评估.于小红,女,教授,博士生导师.