基于模型函数与L-曲线的正则化参数选取方法
2014-01-18徐会林王泽文喻建华
胡 彬,徐会林,王泽文,喻建华
(东华理工大学理学院,江西南昌330013;2.河南理工大学数学与信息科学学院,河南焦作454000)
0 引言
反问题研究已是计算数学及应用数学领域研究的热点问题之一.反问题一般是不适定的[1],其不适定性在数值计算上表现为解不连续依赖测量数据.即使在实际测量过程中测量误差非常小,也会引起解的巨大波动.目前求解不适定问题最具有普遍性、完备性的是Tikhonov正则化方法,但该方法的有效性取决于选取到合适的正则化参数.目前比较有代表性的正则化参数选取策略有:Morozov偏差原理、广义交叉检验、L-曲线(L-curve)等准则.当误差水平已知或可估计时,Morozov偏差原理是最常采用的正则化参数选取策略之一,但是当不适定算子方程右端项的误差水平δ未知时,Morozov偏差原理就失效了.为了克服Morozov偏差原理需要已知误差水平的局限性,P.C.Hansen等提出基于L-曲线的正则化参数选取方法[2-3],可以在误差水平未知的情形下找到近似最佳的正则化参数.
在利用Morozov偏差原理确定正则化参数时需要借助牛顿迭代,而牛顿迭代的计算量比较大,为了克服这一缺点,文献[4-7]中提出了1种新的确定正则化参数的方法—模型函数法.它是将Tikhonov泛函定义为关于α的函数,再用1个简单的具有显示表达式的模型函数来近似F(α),通过简单迭代确定正则化参数.
本文在上述2种方法的基础上研究了基于模型函数的修正L-曲线准则,证明了所得序列点是局部收敛的,给出了相应的迭代算法.通过算例验证了该准则的有效性,同时也指出了目前还存在的不足和今后进一步研究的方向.
1 模型函数法
线性反问题一般可归结为解第1类不适定算子方程:

其中K是Hilbert空间X到Y上的有界线性算子.由于观测数据存在误差,所以一般把方程(1)改写为

其中δ为误差水平,‖yδ-y‖≤δ.Tikhonov正则化方法是将求不适定方程(2)的解转为求Tikhonov泛函

的最优解,其中α>0是正则化参数.对于固定的正则化参数α,记最优函数为

引理1[4]设K:X→Y是有界线性算子,X,Y均为Hilbert空间.∀α >0,(3)式的唯一解x(α)是无穷次可微的,且g=dnx(α)dαn∈X可由

递推求解得到.
定理1[4-5]最优函数F(α)在(0,+∞)内是无限次可微的,且∀α >0,F(α)满足

模型函数的方法就是在αk附近构造F(α)的局部近似函数Fk(α),使其满足微分方程(4),即

若假设‖Kx(α)‖2≈ Tk‖x(α)‖2,代入(5)式并注意到 F'(α)= ‖x(α)‖2,解得

即得到双曲模型函数:

由于 Kx(α)≈ yδ,故可设 ‖Kx(α)‖2≈‖yδ‖2-Tk,代入(5)式得

解微分方程(6),得Fk(α)=Tk+Ckα,其中Ck、Tk是待定参数且由方程组

确定,即

于是,得到更为简洁的双曲模型函数:

文献[8]研究了非精确数据下的线性模型函数选取正则化参数.虽然线性模型函数具有计算简单、收敛性较好等优点,但是却不能将它与L-曲线准则相结合而得到选取正则化参数的算法.文献[9]将双曲模型函数m1(α)应用于L-曲线选取准则获得选取正则化参数的新算法.本文是前述研究的继续和深入,基于双曲模型函数m2(α)研究修正的L-曲线选取准则,从而获得选取正则化参数选取的新方法.
2 修正的L-曲线准则
L-曲线准则是残差‖Kx(α)-yδ‖2与正则化解‖x(α)‖2在一组正则化参数下所构成的图像,也就是由(‖Kx(α)-yδ‖2,‖x(α)‖2)所构成的平面曲线.最优的正则化参数α出现在曲线的拐点处. 通常转化为对应的(2log‖Kx(α)-yδ‖,2log‖x(α)‖)曲线,因为曲线形状如字母L(见图1),故称为L-曲线准则.从图像上很容易找到曲线的拐点,即最优正则化参数α在对应曲线的“角点”出现.记u(α)=2log‖Kx(α)-yδ‖,v(α)=2log‖x(α)‖,则L曲线上各点的曲率公式[10-11]为

曲率最大的点对应正则化参数即为所需正则化参数.

图1 L-曲线示意图
由文献[12]知,若L-曲线在点α=α*处取到最大曲率,且在该点处曲线的斜率为 -1/μ,则下列泛函:

在α=α*处取得极小值.因此,选取正则化参数的L-曲线准则等价为求泛函(8)的极小值点.修正的L-曲线准则就是通过求(8)的极小值来获得合适的正则化参数.由于是α的非线性隐式函数,不便于计算.本文利用模型函数的方法将(8)式显化,从而简化计算,提高计算效率.
3 基于模型函数的修正L-曲线算法
对于任意给定的α>0,最优函数F(α)为

且F'(α)= ‖x(α)‖2,则(8)式可改写成F(α)的形式,即

模型函数m(α)是F(α)的局部近似,则(9)式的局部近似为

本文主要研究了双曲模型函数m2(α),代入(10)式得 ω(α)=(T+2C/α)(-C/α2)μ.
对 ω(α)求导,得

令 ω'(α)=0,解得 α=-C(1+2μ)(μT).
对于正则化参数 αk,求得对应的正则化解x(αk),再根据方程组(7)可确定参数 Ck,Tk,则

由(11)式及Ck<0,Tk>0知αk+1>0且它是唯一的.该算法比文献[9]中的更为简单,因为文献[9]给出的是关于α的2次方程,选取其中较大的作为正则化参数αk+1.
综合上面分析,得到基于双曲模型函数m2(α)与修正的L-曲线正则化参数选取策略的新算法:
算法1 给定 ε > 0,yδ,K,μ > 0;
Step 1 给定1个初始值α0>α*,置k=0;
Step 2 解正则化方程αkx+K*Kx=Kyδ;
Step 3 求出 Ck,Tk,αk+1;
Step 5 停止迭代,输出正则化参数αk+1.
定理2 如果

则在算法1中函数ωk(α)在点αk处是局部严格单调递减的.
证算法1中产生的函数ωk(α)为
ωk(α)=(Tk+2Ck/α)(-Ck/α2)μ,则 ωk'(α)=(-Ck)μ(-2Ck+(αTk+2Ck)·(-2μ))/α2μ+2.取 α= αk,把(7)式中解得 Ck,Tk的表达式代入得
由已知条件得ω'k(αk)<0,即函数ωk(α)在点αk处是局部严格单调递减的.
定理3 给定初始值α0满足(12)式,则算法1产生严格单调递减序列{αk}且收敛.
证由定理2 的证明过程知,

令 φ(α)=-2Ck+(αTk+2Ck)(-2μ),显然φ(αk)< 0,φ'(αk)< 0.所以函数φ(α)是严格单调递减的.由算法1知φ(αk+1)=0,所以αk> αk+1.又∀k均有αk>0,故收敛性成立.
4 数值算例
例1 求解第1类Fredholm积分方程[13]:

其中,核 K(s,t)=1 [1+100(t-s)2],

本文用等距节点复化梯形公式来离散第1类Fredholm 积分方程(13),得线性方程组Ax-=y-,其中把积分核K(s,t)离散成矩阵Am×n,x(s)离散成n维列向量x-.对方程组右端加入随机扰动为

其中r为Matlab中的随机函数.取不同的误差值δ,求出对应不同误差值δ的正则化参数,并把不同正则化参数求出的正则化解对比(见图2~4),其中实线表示无扰动下的精确解,星形线表示不同正则化参数下的数值近似解.
情形1 当δ=5.8378e-4,α=3.7320e-4,正则化解的相对误差ρ=0.0678.正则化解与真解如图2和图3所示,其中图2是该情形下未作正则化处理的计算所得解(即当α=0时的最小二乘解),图3为算法1计算所得解.
情形2 当δ=8.5401e-8,α=6.6470 e-4,正则化解的相对误差ρ=0.0500,算法1计算结果如图4所示.
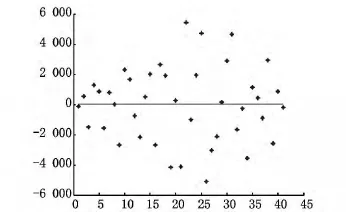
图2 α=0

图3 α=3.7320e-4

图4 α=6.6470e-4
例2 求解第1类Fredholm积分方程[14-15]:

x(s)=a1e-c1(s-t1)2+a2e-c2(s-t2)2,a1=2,a2=1,c1=6,c2=2,t1=0.8,t2=-0.5,K(s,t)=(cos(s)+cos(t))2(sin(u)u),u= πsin(s).
情形1 当δ=0.0022,α=0.0470时,正则化解的相对误差ρ=0.1746.正则化解与真解如图5和图6所示,其中图5是未作正则化处理的计算所得解,图6为算法1计算所得解.

图5 α=0

图6 α=0.0470
情形2 当δ=2.2268e-5,α=0.0466时,正则化解的相对误差ρ=0.1744,算法1计算结果如图7所示.
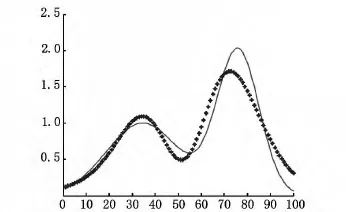
图7 α=0.0466
5 结论
本文基于模型函数方法研究了正则化参数选取的修正L-曲线准则,使得计算上更加简单.从算例的模拟结果可以看出,基于双曲模型函数m2(α)的所得修正后的L-曲线准则是有效的.但是,本文只证明了初始正则化参数选取满足一定前提条件下,算法1产生的序列是局部收敛的.对于是否存在全局收敛性的算法[16],还有μ值选取原则等问题还需进一步研究.
[1]刘继军.不适定问题的正则化方法及应用[M].北京:科学出版社,2005.
[2]Hansen P C,O’Leary D P.The use of the L-curve in the regularization of discrete ill-posed problems[J].SIAM J Sci Comput,1993,14(6):1487-1503.
[3] Hansen P C.Analysis of discrete ill-posed problems bymeans of the L-curve [J].SIAM Review,1992,34(4):561-580.
[4]Xie Jianli,Zou Jun.An improvedmodel functionmethod for choosing regularization parameters in linear inverse problems[J].Inverse Problems,2002,18(5):631-643.
[5]王泽文,徐定华.线性不适定问题中选取Tikhonov正则化参数的线性模型函数方法[J].工程数学学报,2013,30(3):451-466.
[6]Wang Zewen,Liu Jijun.Newmodel functionmethods for determining regularization parameters in linear inverse problems[J].Applied Numerical Mathematics,2009,59(10):2489-2506.
[7]Wang Zewen.Multi-parameter Tiknonov regularization andmodel function approach to the damped Morozov principle for choosing regularization parameters[J].Journal of Computational andApplied Mathematics.2012,236(7):1815-1832.
[8]胡彬,夏赟,喻建华.算子非精确条件下确定正则化参数的一种方法[J],江西师范大学学报:自然科学版,2014,38(1):65-69.
[9]Heng Yi,Lu Shuai,MhamdiA,et al.Model functions in themodified L-curvemethod-case study:the heat flux reconstruction in pool boiling[J].Inverse Problems,2010,26(5):1-13.
[10]张立涛,李兆霞,张宇峰,等.结构识别计算中基于L-曲线的模型确认方法研究[J].运动与冲击刊,2011,30(11):36-41.
[11]王宏志,赵爽,胡艳君.基于L-曲线正则化的MAP超分辨率图像复原[J].吉林大学学报:理学版,2008,46(2):275-278.
[12] Reginska T.A regularization parameter in discrete illposed problems[J].SIAM J Sci Comput,1996,17(3):740-749.
[13]樊树芳,马青华,王彦飞.算子及观测数据都非精确情况下一种新的正则化参数选择方法[J].北京师范大学学报:自然科学版,2006,42(1):25-31.
[14]王彦飞.反问题的计算方法及应用[M].北京:高等教育出版社,2007.
[15]郭文彬.奇异值分解及其广义逆理论中的应用[M].北京:中国科学院研究生院,2003.
[16]高炜,朱林立,梁立.基于图正则化模型的本体映射算法[J].西南大学学报:自然科学版,2012,34(3):118-121.
