基于F28335的旋转变压器接口电路的应用设计
2014-01-16王海明胡剑生王旭昊杨新影
王海明,胡剑生,王旭昊,李 嘉,杨新影
(许继集团有限公司 河南 许昌 461000)
旋转变压器简称“旋变”,是自动装置中的一类精密控制微电机,主要用于伺服控制系统中。与光学编码器相比,旋转变压器不仅具有更好的抗震动、抗冲击、抗湿度变化以及抗温度变化的能力,同时还具有价格低廉,组装简单,维修方便的特点[1]。目前旋转变压器已广泛应用于卫星、电动汽车、机床、新能源发电、家电等各种恶劣工作环境中,取得了较好的应用效果[2-3]。
文中通过分析旋变的工作原理,利用F28335控制芯片的特点,设计了一种接口电路,结合相应的算法,实现接口电路的应用。
1 旋转变压器工作原理
旋转变压器是一种输出电压随转子转角变化的信号元件。当励磁绕组以一定频率的交流电压励磁时,输出绕组的电压幅值与转子转角成正弦、余弦函数关系,或保持某一比例关系,或在一定转角范围内与转角成线性关系。旋转变压器的分类方法有很多,用于解算装置中的旋转变压器有以下4种形式:
1)正余弦旋转变压器:其输出电压与转子转角的函数关系呈正弦或余弦函数关系。2)线性旋转变压器:其输出电压与转子转角呈线性函数关系。3)比例式旋转变压器:其输出电压与转角呈比例关系。4)特殊函数旋转变压器:其输出电压与转角呈某一给定的函数关系(如正割函数、倒数函数、弹道函数、圆函数以及对数函数等)。
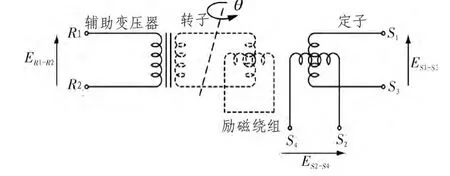
图1 BRX旋转变压器的原理示意图Fig. 1 Schematic diagram of the BRX resolver
如图1所示,此类旋变由一个旋转的励磁绕组、一对正交的定子绕组和一个辅助变压器构成。励磁绕组随着电机轴一起旋转,励磁信号通过辅助变压器进行施加,在正交的定子绕组上产生一组随转子角度变化的正余弦信号USIN和UCOS[4]。当给转子绕组施加一个励磁信号,即 ER1-R2= E s i n ω t 时,假定定子、转子绕组匝比为k:1,则两相正交定组中将感应如下信号:

式中 :E—— 正弦波励磁电压幅值;ω——正弦波励磁电压角频率;K——电压比;θ——转子角度。
由旋转变压器工作原理可知,在旋转变压器的原边加上正弦激励信号,可在其副边得到同相位的两路幅值为空间正交的正弦信号。通过监测它的幅值的变化,即可测出旋转变压器的转子的空间角度的变化。
2 F28335芯片介绍及应用算法
2.1 F28335芯片介绍
TMS320F28335 DSP是TI公司最新推出的一款TMS320C28X系列浮点DSP控制器[5]。其具有150 MHz的高速处理能力,具备32位浮点处理单元,6个DMA通道支持ADC、McBSP和EMIF,有多达18路的PWM输出,其中有6路为TI特有的更高精度的PWM输出(HRPWM),12位16通道ADC,外部存储扩展接口、看门狗、三个定时器。与以往的定点DSP芯片相比,该器件的精度大大提高,另外,该DSP还具有成本低, 功耗小,性能高,外设集成度更高,数据以及程序存储量更大,AD转换更加精确和快速等特点。
由于TMS320F28335 DSP具有强大的集成功能,因此应用设计中选用内部的定时器产生8 kHz频率的PWM波形,再结合外部的调理电路可以产生旋变激励需求的正弦信号;选用高精度的ADC实现对旋转变压器输出的正余弦波形的采集和存储;选用32位浮点处理单元可以实现对旋转变压器幅值和角度的快速计算。
2.2 应用算法
本设计选用TMS320F28335 DSP软件编程算法实现对旋转变压器输出的正余弦信号的解码运算,软件解码算法相对于RDC芯片具有成本低、抗环境能力强、采用数字滤波器消除速度带来的滞后效应等特点[6]。设计中选用的软件解码算法为角度跟踪观察器的解码算法,具体实现原理如图2所示。
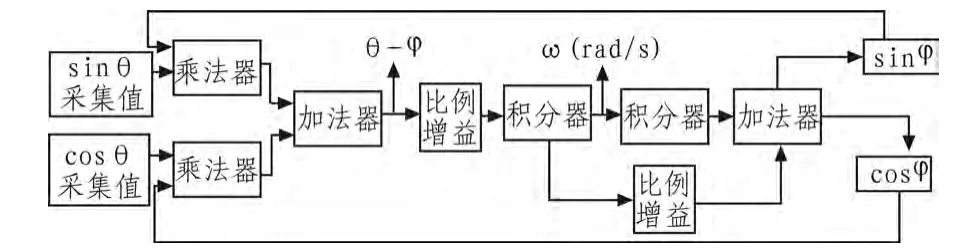
图2 角度跟踪观察器原理图Fig. 2 Schematic diagram of the angle tracking observer
图中θ是电机转子的实际角度,φ是观察器输出的估算角度。经过第一个加法器后的输出结果为:
Finally, it is to be noted that in our work, Zn2TiO4 nanoparticles were prepared from the laboratory grade ZnO and TiO2 powders of extremely low cost ($10 for 500 g). Because of this, these nanoparticles can be a better choice for applications of visible photocatalytic dye decomposition.

在估算角度θ和实际角度φ偏差无限小的情况下,由极限运算法则可以得出观测误差代替[7]。第一个比例增益和第一个积分器组成PI调节器对(θ-ϕ)进行数据调节,第一个积分器的输出就是当前的速度。对当前速度再次进行积分并通过比例加减运算可以得到一个作为反馈用的估算角度φ ,该角度的正弦余弦值可通过查表得到。在实际应用中需要加入积分限幅环节,为防止积分累积造成估算角度φ超出2π ,需要对 进行监测,如超出2π范围需要减去2π进行调整。同时由式(1)和式(2)可以看出,如果在激励信号的峰值点进行采样,计算会变得简单些。由上图2可以看出,角度跟踪观察器的解码算法实现起来并不复杂,只有简单的乘法和加法,这对于拥有32位浮点处理单元的DSP芯片 TMS320F28335来说,实现起来不会耗费大量的时间和内存空间占有率。
3 接口电路应用设计
接口电路的设计主要包含旋转变压器、PWM产生部分、激励调理电路、旋变输出正余弦信号调理电路、正余弦信号采集部分,具体实现如图3所示。
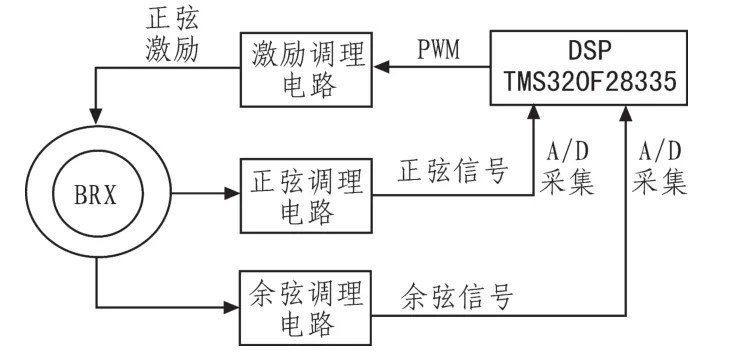
图3 旋变接口电路原理图Fig. 3 Schematic diagram of the interface circuit for magslip
3.1 PWM产生及正余弦采集部分
TMS320F28335内部集成了3个定时器和12位16通道ADC功能,实现PWM和信息的采集就变得非常容易,设计应用中选用Timer0定时器产生幅值为3.3 V、占空比为1:1的8 kHz频率的PWM波形,其中占空比和频率是可以调节改变的。正余弦信号的A/D采集选用内部12位16通道ADC其中的两路进行采集实现。
3.2 激励调理电路设计
激励调理电路是用来给旋转变压器提供激励输入信号,使旋转变压器在电机旋转时能够产生两路交流信号。TMS320F28335已经产生了幅值为3.3 V、8 kHz频率的PWM方波信号,要将方波信号变为旋变需要的正弦激励信号,激励电路不仅要实现方波到正弦波的变化,而且输出的正弦波的功率不能太小,否则激励不能直接驱动旋转变压器。因此,设计的激励调理电路应该是波形转换、滤波和功率放大电路的组合。具体的实现思路如图4所示。

图4 激励调理电路原理图Fig. 4 Schematic diagram of the excitation regulating circuit
3.2.1 积分电路设计
将方波变为三角波的积分电路如图5所示,由于实际的积分器电路的输出电压受工作电源的限制,不可能输出无限高,因此,对积分器R1C1参数有限制,即R1C1不能太小,否者,会导致三角波被削顶,成为“平顶波”。由于输入U i为TMS320F28335产生成的占空比50%、幅值3.3 V、频率为8 kHz的方波信号,而非对称的 1.65 V方波信号,因此需要在OP13D的12端设计1.65 V的偏置电路。假设三角波的峰峰值为U2,根据电容的充电公式,可以计算R1C1的关系为:

由于运放TL0841的供电为±15 V,考虑积分三角波被削顶问题,选择U2为6.25 V,代入式(4) 可得R1C1=1.65×10-5。
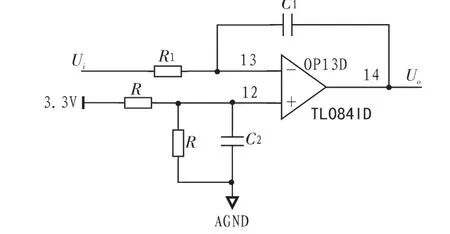
图5 积分电路原理图Fig. 5 Integral circuit diagram
3.2.2 隔直、滤波电路设计
隔直电路实际也是高通电路,可以将偏置电压滤除,使得三角波关于零电压对称。由于三角波的频率为8 kHz,设计时选用的高通截至频率为530 Hz,具体的设计原理图如图6所示。
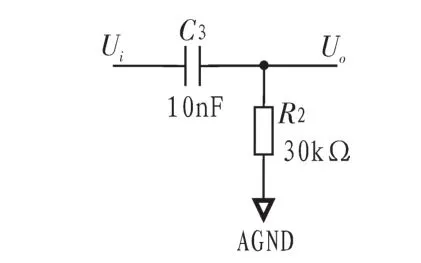
图6 隔直电路原理图Fig. 6 The DC circuit diagram
将隔直后的三角波转换为正弦波,选用的滤波电路为Sallen-Key[7]单位增益低通滤波器,具体设计原理如图7所示。
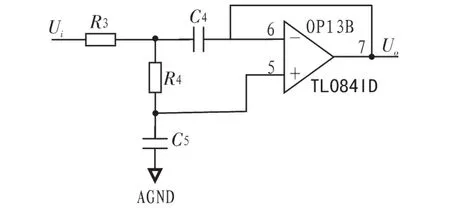
图7 单位增益二阶有源低通滤波器原理图Fig. 7 Schematic diagram of the unit gain two order active low-pass filter
假设图7中R4=R,C5=C,R3=mR,C4=nC,可以得出可以证明,对于一定的n,当(即m=1),也即R3和R4阻值相等时,Q的值最大。当m=1时,n=4Q2。实际电路中,电阻R选取太大,引入的热噪声增大;C只选择太小,又容易受寄生电容的影响。设计中选择C=1 nF,n=4.7,R=5.1 kΩ,可得品质因数 ,R3=R4=5.1 kΩ,C5=1 nF,
3.2.3 放大电路设计
放大电路设计采用推挽加比例电路来实现。电路外部供给电源用双电源的原因是使电路静态工作点调节零点电位[9]。如图8所示,推挽电路所用的NPN型三极管Q2和PNP型三极管Q3特性对称,在输入正弦波的一个周期内轮流每个导通半个周期,消除了交越失真。电阻R5、R7和OP13C构成反向比例放大电路,实现对输出波形峰峰值的放大。设计时将输出波形峰峰值选定为8 V,经过二阶有源低通滤波器后V in的峰峰值为6.25,可以计算得出R7与R5的比例系数为1.28。FU1熔丝实现激励输出短路时对三极管的保护。TVS1为静电保护管,可以避免因空气放电或接触放电造成的旋变激励电路损坏。
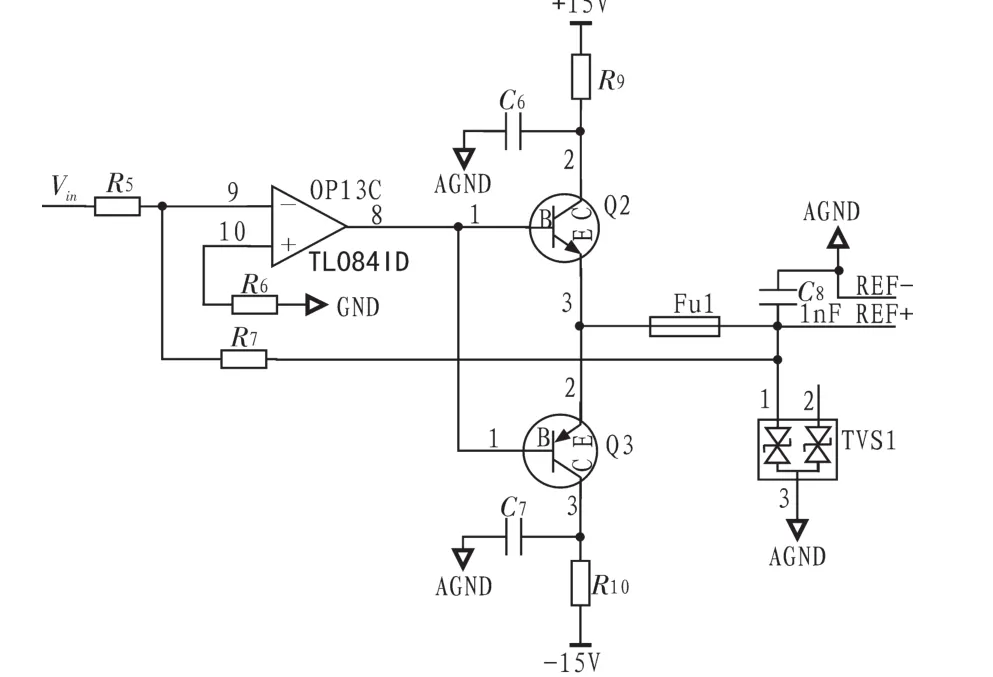
图8 推挽比例放大电路原理图Fig. 8 Schematic diagram of the push-pull proportion amplifying circuit
3.3 正、余弦调理电路设计
从旋变输出的正、余弦波形可能会夹杂着噪声,同时正、余弦波形的幅值也有可能会超出TMS320F28335内部A/D输入信号的限定幅值3 V。因此,需要对旋变输出的正、余弦波形进行调理。由于正、余弦波形相似,设计中选择对正弦波进行设计分析,其调理电路如下图9所示。L1为共模电感,可以实现对差分输入的正弦信号滤波,抑制共模干扰。C13用来消除正弦信号中的高频干扰。为了实现对旋变输出的正、余弦波形的采集,选择添加1.5 V偏置电压,应用差分比例电路将正、余弦波形的幅值缩小为原来的0.412。结合A/D信号采集的范围,可以计算输入的电压范围为±3.64 V ,可以实现对多摩川旋转变压器输出峰-峰值约4 V左右正、余弦信号的采集。
4 接口电路仿真与实验分析
选用电子电路仿真软件Multisim对激励调理电路进行仿真,仿真结果如图10、11所示。图10中U1为经过积分电路后的三角波波形,U2为经过隔直电路后的三角波波形;图11中U3为经过单位增益低通滤波电路后的正弦波形,U4为经过推挽放大电路后的激励波形。
通过图10、11仿真波形可以看出,仿真波形符合电路设计,且输出的旋转变压器激励信号是平滑且幅值可调的正弦波。该激励信号输入到旋转变压器,旋转变压器可以输出空间正交的与角度相关的正弦和余弦电压波形,然后经过调理电路输入到TMS320F28335内部进行A/D信号采集,进行解码运算。
将设计有此旋变接口电路的控制板连接电机旋变,测试旋转变压器转子旋转角度为180°时,激励和输入至TMS320F28335的A/D管脚的正余弦波形,分别如图12、13所示。
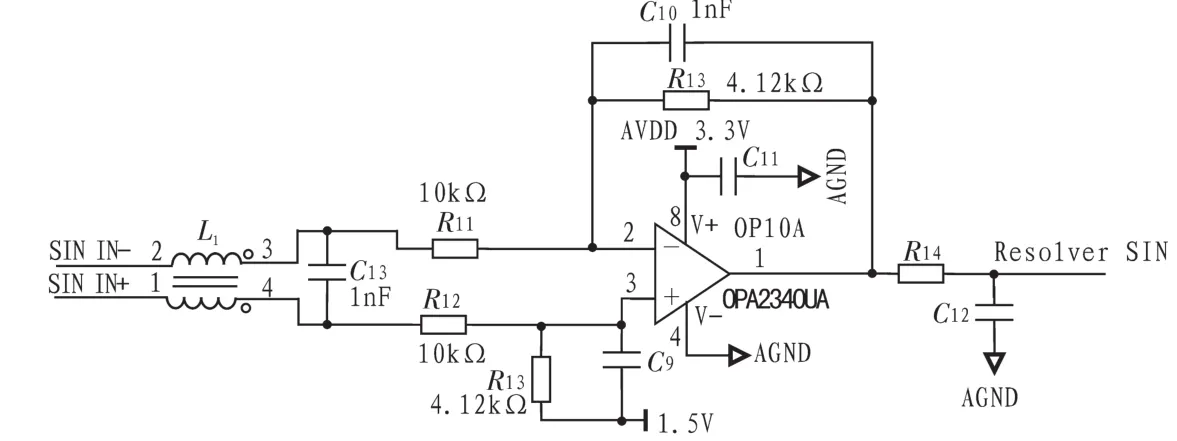
图9 正弦调理电路原理图Fig. 9 Schematic diagram of the sinusoidal modulation circuit
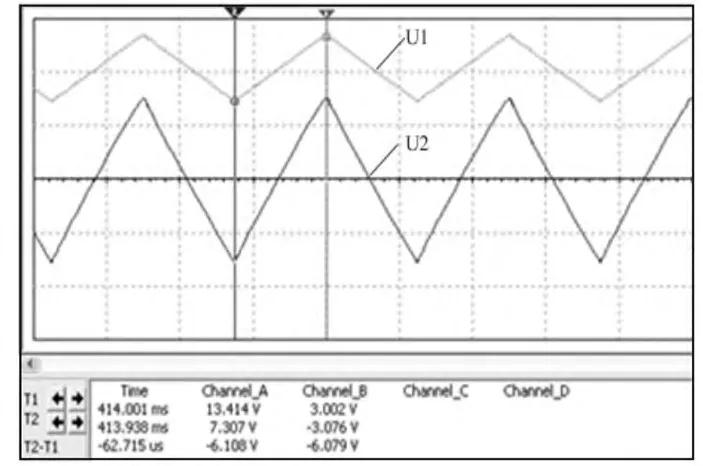
图10 积分、隔直电路输出波形Fig. 10 Output waveform of the integral and DC circuit
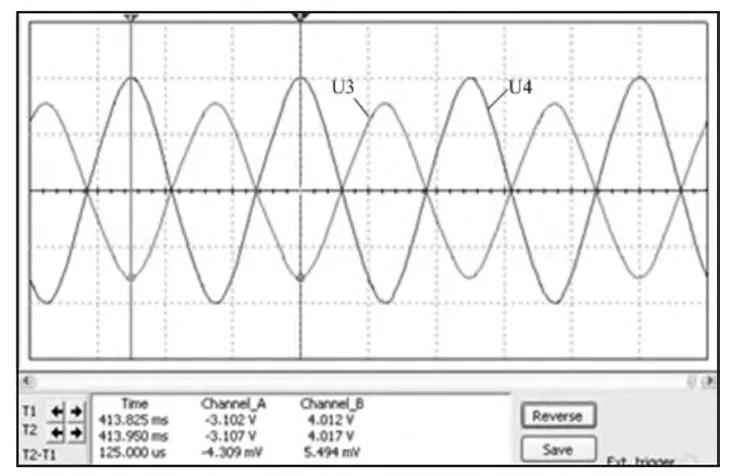
图11 单位增益低通滤波、推挽放大电路输出波形Fig. 11 Output waveform of the unit gain low-pass and push-pull amplifying circuit
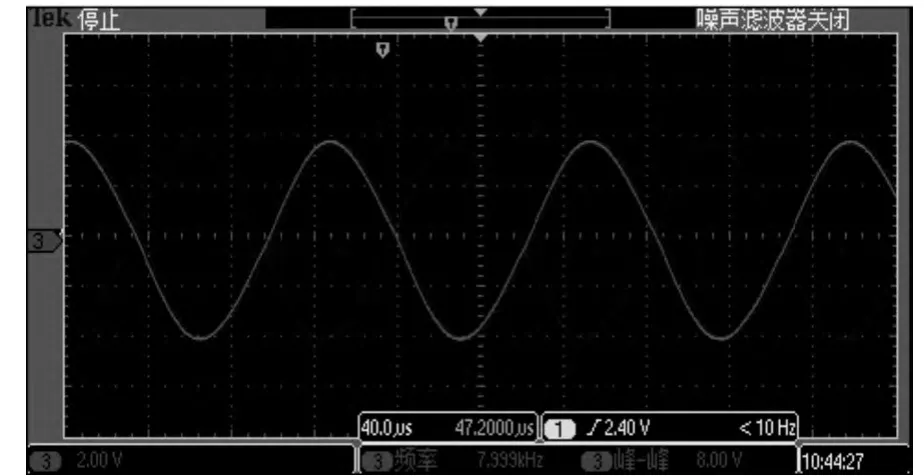
图12 电机旋变激励波形Fig. 12 Motor resolver excitation waveform
从图12、13可以看出测试波形平滑、周期稳定、幅值和设计一致,是良好的激励和输出波形,为数据采集和解码运算提供了可靠的依据。
5 结束语
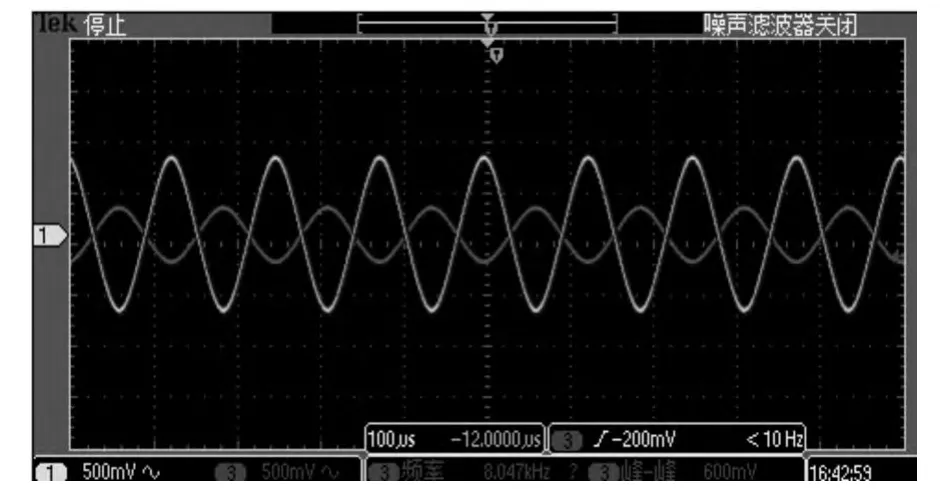
图13 输入至AD管脚的正余弦波形Fig. 13 Sine and cosine waveform input to the AD pin
文中分析了旋变工作原理,基于F28335设计了旋转变压器的接口电路。实验表明,当旋转变压器在开、闭环的工作方式下运行时, 接口电路性能稳定,能够较准确地实现速度检测的功能。目前,该接口电路已经应用于某交流伺服电机控制系统中,具有误差小、实时性好、可靠性高、抗干扰能力强等优点,能够在恶劣、强电磁干扰环境中正常工作。
[1] Kanji Kitazawa. Principle and Applications of Resolvers for Hybrid Electric Vehicles and others[C]// Motor, Drive & Automation Systems Conference, project report, 2009:79.
[2] 李临,吴建新.高精度步进电机角度位置跟踪系统设计[J].电气传动,2003(4):25-27.LI Lin,WU Jian-xin. High precision angle position tracking system for stepper motor design [J]. Electric Transmission,2003(4):25-27.
[3] 王阳,杨庆禹.基于DDS的旋转变压器接口电路设计与实现[J].自动化技术与应用,2009,28(3):96-97.WANG Yang, YANG Qing-yu.Design and implementation of a rotating transformer interface circuit based on DDS[J]. Techniques of Automation and Application. 2009,28(3):96-97.
[4]杨渝钦.控制电机[M].北京:机械工业出版社,2011.
[5]刘陵顺,高艳丽,张树团,等.TMS320 F28335 DSP原理及开发编程[M].北京:北京航空航天大学出版社,2011.
[6] Sarma S,Agrawal V,Udupa K. Software-based resolver-to-digital conversion using a DSP[J]. IEEE Trans. Ind. Electron,2008,55(5): 371-379.
[7] М.拉赫曼,夏超英,郑水妹.基于AU6802的旋转变压器接口电路应用设计[J].电机与控制应用,2006,33(5):16-19.Rachman M,XIA Chao-ying,ZHENG Shui-mei. Design of rotating transformer interface circuit based on AU6802[J].Motor and Control,2006,33(5):16-19.
